
الدرس 3: القيادة إلى الرقم "1"
- أعد ضبط الملعب لتحريك روبوت الواقع الافتراضي مرة أخرى إلى وضع البداية.
-
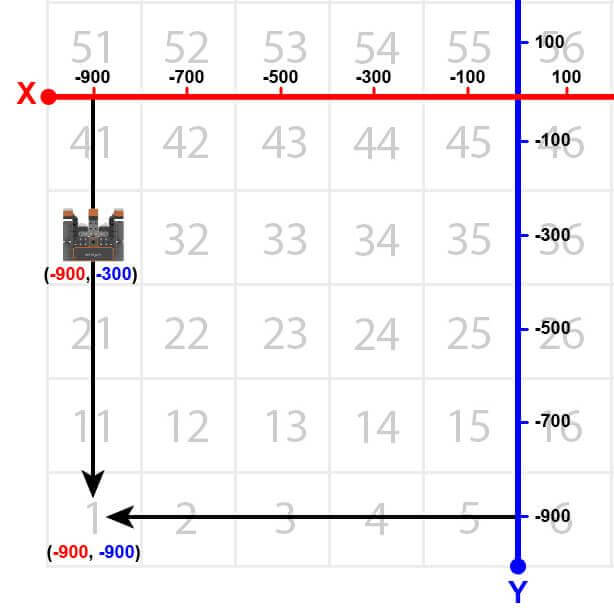
الآن، سوف يستدير روبوت الواقع الافتراضي ويعود إلى الرقم "1" بمجرد أن يصل إلى الرقم "31" في ملعب خريطة شبكة الأرقام.
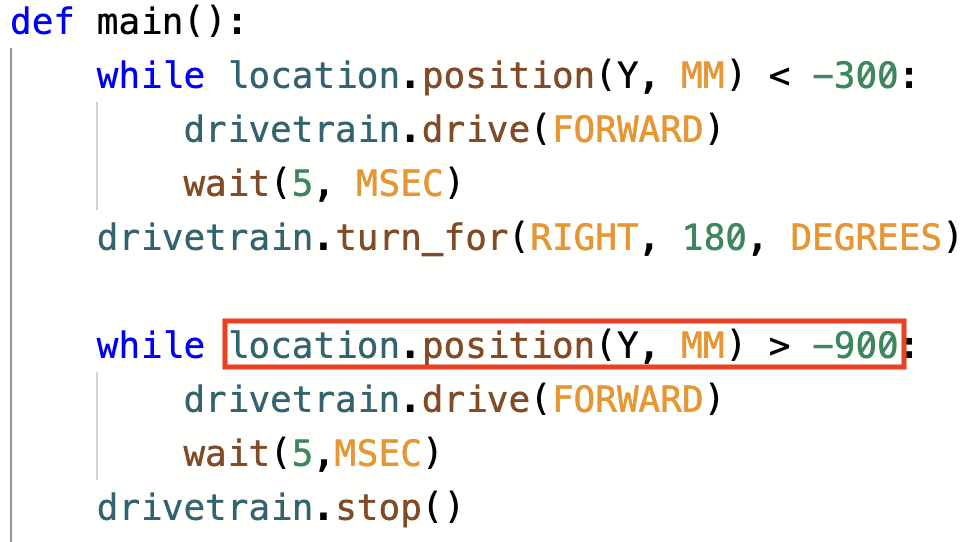
- قم بإزالة الأمر stop واستبداله بالأوامر التالية. يجب أن يبدو مشروعك كما يلي:
# Add project code in "main"
def main ():
while location.position (Y, MM) < -300: drivetrain.drive
(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 180, DEGREES)
while location.position(Y, MM) > -900:
drivetrain.drive(FORWARD)
wait(5, MSEC
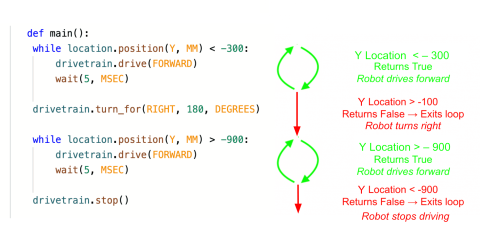
) drivetrain.stop ()- لاحظ أن الحلقة الثانية while تحتوي على عامل أكبر من بدلاً من عامل أقل من.
وذلك لأن روبوت الواقع الافتراضي يقود الآن إلى أسفل المحور Y والأرقام أصبحت أكثر سلبية. سيتوقف روبوت
الواقع الافتراضي بمجرد أن تكون قيم Y أقل من -900.
- قم بتشغيل ملعب خريطة شبكة الأرقام إذا لم يكن مفتوحًا بالفعل، وقم بتشغيل المشروع.
- شاهد روبوت الواقع الافتراضي يقود إلى الرقم "1" في ملعب خريطة شبكة الأرقام.
- في هذا المشروع، ينتقل روبوت الواقع الافتراضي إلى الرقم "1" في ملعب خريطة شبكة الأرقام. نظرًا لأن قيم Y تتناقص مع انتقال روبوت الواقع الافتراضي إلى الرقم "1"، يستخدم المشروع مشغلًا أكبر من.
سوف يتحرك روبوت الواقع الافتراضي للأمام بينما تكون قيمة Y أكبر من الإحداثي الذي
يكون عليه الرقم المشار إليه ويتوقف بمجرد أن تكون قيمة Y أقل من قيمة Y للإحداثي. نظرًا لأن
قيمة Y للرقم "1" هي -900، سيتوقف روبوت الواقع الافتراضي عن القيادة بمجرد أن تكون قيمة Y أقل من
-900.
لمعلوماتك
عادة ما تضاف التعليقات إلى المشاريع لشرح ما يريد المبرمج أن تفعله أجزاء من المشروع. التعليقات مفيدة عند التعاون واستكشاف الأخطاء وإصلاحها، لأنها توفر السياق والمعنى العام للرمز. يسمح استخدام التعليقات للمبرمج بالتفكير بشكل مفاهيمي في الهدف العام للمشروع وغايته، بدلاً من محاولة "التخمين والتحقق". تبدأ التعليقات في بايثون بعلامة رطل وسيتم تمييزها باللون الأخضر كما هو موضح في الرمز أدناه. هل تريد أن تتذكر ما هي الإحداثيات التي تتماشى مع رقم معين ؟ أضف تعليقًا يقول "قُد إلى 81 في (-900، 700 )". يساعد هذا على توصيل الأقسام والأوامر المختلفة للمشروع.
# Add project code in "main"
def main ():
# Drive to 81 located at (-900, 700)
while location.position (Y, MM) < 700: drivetrain.drive
(FORWARD)
wait(5, MSEC)
# Turn around
drivetrain.turn_for (RIGHT, 180, DEGREES)
# Drive to 41 located at (-900, -100)
while location.position (Y, MM) > -100:
drivetrain.drive (FORWARD)
wait(5, MSEC
) drivetrain.stop ()لمزيد من المعلومات حول التعليقات، راجع المقالة استخدام التعليقات في VEXcode VR مع Python.
قم باختيار الزر التالي لمواصلة بقية هذا الدرس.