
บทเรียนที่ 3: ขับรถไปยังหมายเลข '1'
- รีเซ็ตสนามเด็กเล่นเพื่อย้ายหุ่นยนต์ VR กลับไปที่ตำแหน่งเริ่มต้น
-
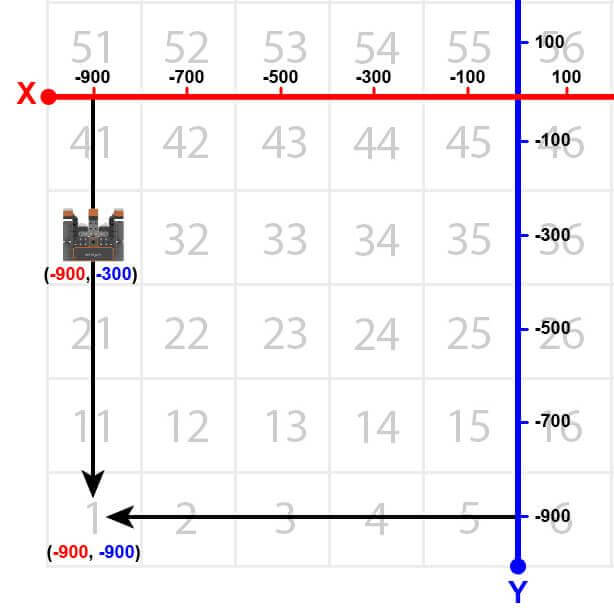
ตอนนี้หุ่นยนต์ VR จะหมุนกลับและกลับไปที่หมายเลข ‘1’ เมื่อถึงหมายเลข ‘31’ บน Number Grid MapPlayground
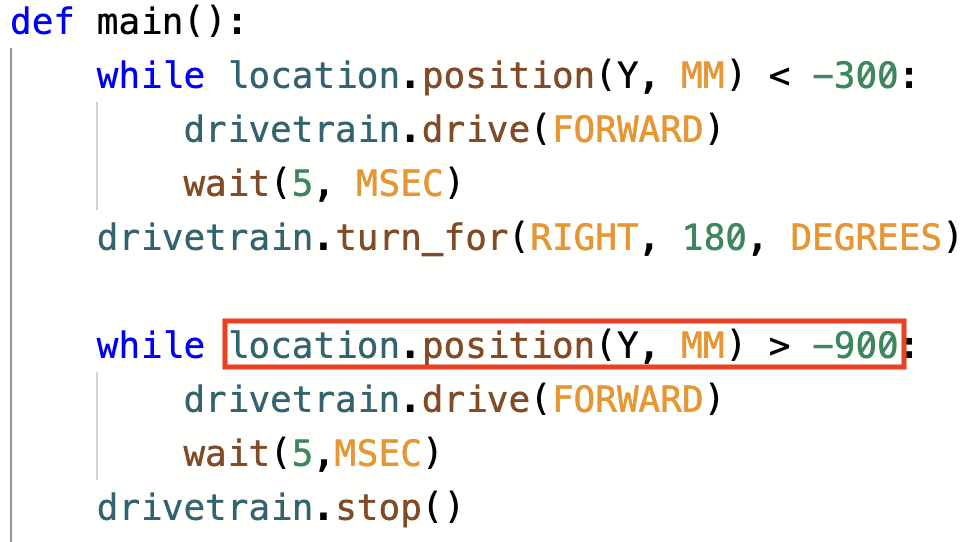
- ลบคำสั่ง หยุด ออก และแทนที่ด้วยคำสั่งต่อไปนี้ โปรเจกต์ของคุณควรมีลักษณะดังนี้:
# เพิ่มรหัสโครงการใน "main"
def main ():
while location.position (Y, MM )-300: < drivetrain.drive (
forward)
wait (5, msec) drivetrain.turn_for
(RIGHT, 180, DEGREES)
while location.position (Y, MM) > -900:
drivetrain.drive (FORWARD)
wait (5, msec
) drivetrain.stop ()- โปรดทราบว่าลูป while ที่สองมีตัวดำเนินการที่มากกว่าแทนที่จะเป็นตัวดำเนินการที่น้อยกว่า นี่เป็นเพราะตอนนี้หุ่นยนต์ VR กำลังขับเคลื่อนแกน Y ลงมาและตัวเลขก็กลายเป็นลบมากขึ้น หุ่นยนต์ VR จะหยุดทำงานเมื่อค่า Y น้อยกว่า -900
- เปิด Number Grid Map Playground หากยังไม่เปิดและดำเนินโครงการ
- ดู VR Robot ขับไปที่หมายเลข ‘1’ บน Number Grid MapPlayground
- ในโครงการนี้หุ่นยนต์ VR จะขับไปที่หมายเลข ‘1’ บน Number Grid MapPlayground เนื่องจากค่า Y ลดลง เมื่อ VR Robot ขับเคลื่อนไปยังหมายเลข ‘1’ โครงการจึงใช้มากกว่าผู้ปฏิบัติงาน
หุ่นยนต์ VR จะขับเคลื่อนไปข้างหน้าในขณะที่ค่า Y มาก กว่าพิกัดที่ระบุไว้และหยุดเมื่อค่า Y น้อย กว่าค่า Y ของพิกัด เนื่องจากค่า Y ของตัวเลข ‘1’ คือ -900 หุ่นยนต์ VR จะหยุดขับเมื่อค่า Y น้อยกว่า -900

สำหรับข้อมูลของคุณ
ความคิดเห็นมักจะถูกเพิ่มลงในโครงการเพื่ออธิบายสิ่งที่โปรแกรมเมอร์ต้องการให้บางส่วนของโครงการทำ ความคิดเห็นมีประโยชน์เมื่อทำงานร่วมกันและแก้ไขปัญหาเนื่องจากให้บริบทและความหมายโดยรวมของโค้ด การใช้ความคิดเห็นช่วยให้โปรแกรมเมอร์คิดตามแนวคิดเกี่ยวกับเป้าหมายและความตั้งใจโดยรวมของโครงการแทนที่จะพยายาม "คาดเดาและตรวจสอบ" ความคิดเห็นใน Python เริ่มต้นด้วยเครื่องหมายปอนด์และจะถูกเน้นเป็นสีเขียวตามที่แสดงในรหัสด้านล่าง คุณต้องการที่จะจำพิกัดที่ไปกับตัวเลขที่แน่นอนหรือไม่? เพิ่มความคิดเห็นว่า “ขับไปที่ 81 ที่อยู่ (-900, 700 )” ซึ่งจะช่วยในการสื่อสารส่วนต่างๆและคำสั่งของโครงการ
# เพิ่มรหัสโครงการใน "main"
def main ():
# Drive to 81 located at (-900, 700)
while location.position (Y, MM) < 700: drivetrain.drive
(FORWARD)
wait (5, msec)
# Turn around
drivetrain.turn_for (RIGHT, 180, DEGREES)
# Drive to 41 located at (-900, -100)
while location.position (Y, MM > )-100:
drivetrain.drive (FORWARD)
wait (5, msec
) drivetrain.stop ()สำหรับข้อมูลเพิ่มเติมเกี่ยวกับความคิดเห็น โปรดดูบทความ การใช้ความคิดเห็นใน VEXcode VR ด้วย Python
เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป