
Hỗ trợ Toán học
Khi giảng dạy Phòng thí nghiệm 4 và 5, cần áp dụng thêm các khái niệm và phép tính toán học. Trang này cung cấp cho giáo viên các nguồn tài liệu nền tảng có liên quan để hỗ trợ môn toán mà học sinh đang khám phá trong các Phòng thí nghiệm này.
Toán học lái xe
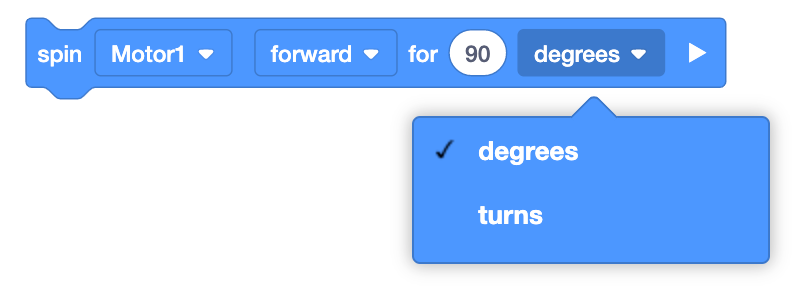
Để hoàn thành cuộc diễu hành trong Phòng thí nghiệm 4, học sinh sẽ lái xe diễu hành Code Base theo một lộ trình diễu hành thẳng. Thay vì sử dụng các khối truyền động để di chuyển cả hai bánh xe cùng lúc, học sinh sẽ sử dụng các khối [Quay để] trong VEXcode GO, như được hiển thị ở đây, để quay các động cơ được kết nối với bánh xe và di chuyển rô-bốt về phía trước. [Xoay để] các khối chấp nhận 'vòng quay' hoặc 'độ' làm tham số. Trong Phòng thí nghiệm 4, học sinh sẽ tính toán số vòng quay cần đưa vào dự án này để lái robot của mình đi hết quãng đường diễu hành.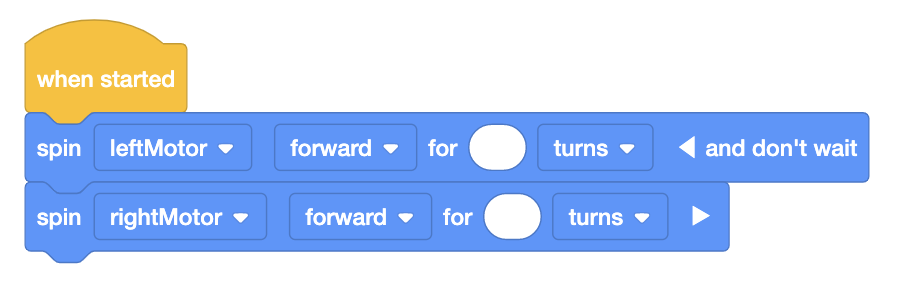
Xem video bên dưới để tìm hiểu cách tính số vòng quay bánh xe cần thiết để lái robot đi thẳng trong một khoảng cách nhất định.
Tài liệu tham khảo hữu ích:
Thuật ngữ và giá trị cho bánh xe màu xám:
| Thuật ngữ | Định nghĩa | Trực quan | Công thức | Giá trị |
|---|---|---|---|---|
| Đường kính | Đo một đường thẳng qua tâm của một vòng tròn | 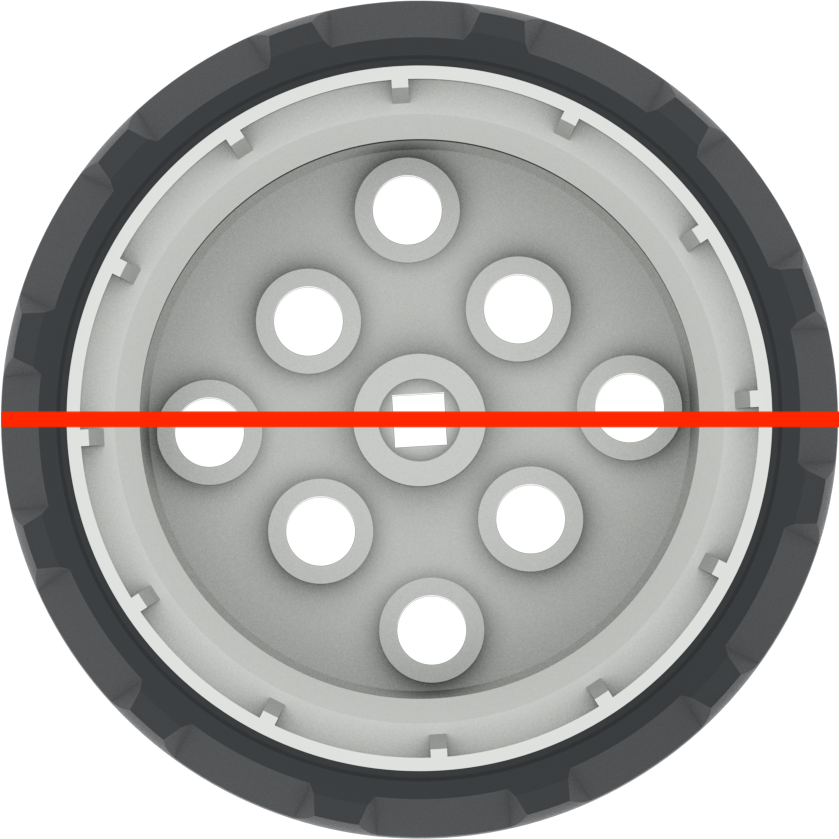 |
d = 2 r | ~ 50,93mm hoặc 2 inch |
| Chu vi | Tổng khoảng cách xung quanh bên ngoài vòng tròn |  |
C = π d | ~ 160 mm hoặc 6,25 in |
Đo lường chính xác
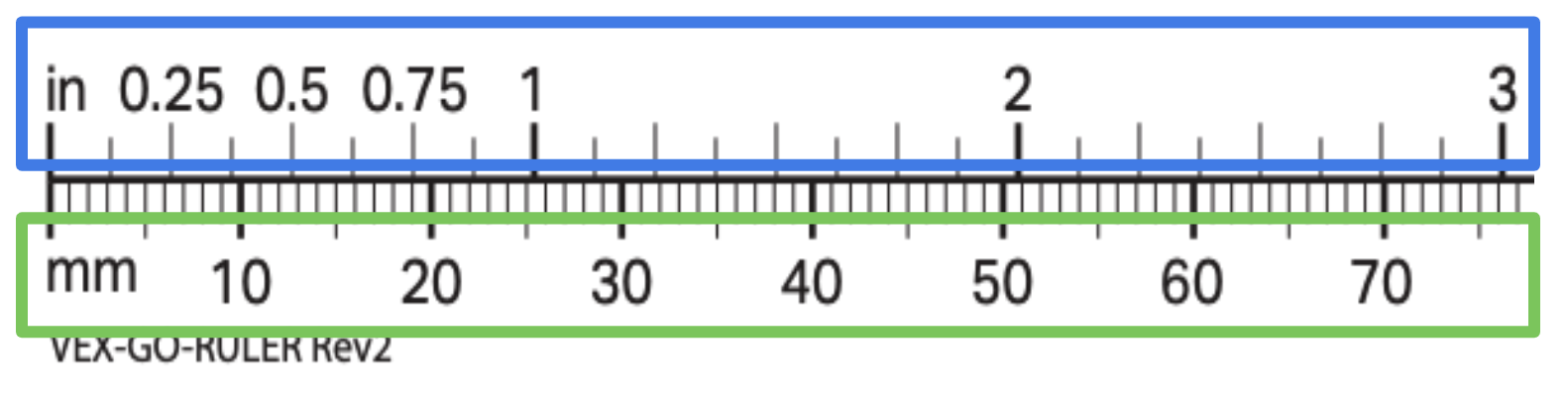
Khi học viên đang đo, hãy nhớ hướng dẫn các em đo cẩn thận và chính xác. Bạn có thể sử dụng Thước kẻ in VEXhọc sinh đo hoặc dùng thước kẻ trong lớp học.
- Nhắc học viên bắt đầu đo từ điểm 0 trên thước và chú ý đến điểm cuối của đồ vật mà các em đang đo. Bắt đầu hoặc kết thúc các phép đo của họ không chính xác sẽ ảnh hưởng đến tính toán của họ và chuyển động cuối cùng của robot của họ.

- Hãy chắc chắn rằng học viên biết cách đọc các dấu trên thước mà các em đang sử dụng, để đo chính xác. Nếu thước đo bạn đang sử dụng có cả đơn vị đo đế quốc và đơn vị đo lường ( như thước đo có thể in VEX GO), hãy chắc chắn rằng học sinh đang sử dụng nhất quán cùng một đơn vị đo lường.
- Học sinh có thể làm tròn số đo của mình đến đơn vị gần nhất, hoặc phân số của một đơn vị. Làm tròn có thể làm cho việc tính toán đơn giản hơn, nếu cần; nhưng cũng có thể làm cho các phép đo kém chính xác hơn. Ví dụ: bạn có thể hướng dẫn học sinh làm tròn đến nửa inch hoặc cm gần nhất, nhưng robot của họ di chuyển xa hơn một chút so với dự định ban đầu. Ngoài ra, bạn có thể yêu cầu học sinh đo đến gần nhất một inch hoặc milimet và thấy rằng robot của họ di chuyển gần hơn với khoảng cách dự định.
- Nếu học viên cần thực hành thêm về đo lường, bạn có thể sử dụng Hoạt động Thực hành Đo lường VEX GO với từng học viên hoặc nhóm, hoặc cả lớp.
Toán học quay 360°
Để hoàn thành cuộc diễu hành trong Phòng thí nghiệm 5, học sinh sẽ lái chiếc phao Code Base của mình dọc theo tuyến đường diễu hành có rẽ.

Mã Base với mũi tên để hiển thị lái xe về phía trước và sau đó rẽ phải
Học sinh sẽ xây dựng dựa trên những gì các em đã học được về mã hóa robot để di chuyển một quãng đường thẳng, để mã hóa robot để lái một quãng đường phi tuyến tính hoặc một khúc cua. Học sinh vẫn đang tính toán số lượt cần thiết để di chuyển một khoảng cách nhất định, vì vậy các em sẽ sử dụng cùng một công thức như trong Phòng thí nghiệm trước đó.
Hãy xem video bên dưới để tìm hiểu về cách tính số vòng quay bánh xe cần thiết để điều khiển robot quay 360° vòng cùng học sinh của bạn.
Tài liệu tham khảo hữu ích:
Khi Code Base quay, các bánh xe lái xe di chuyển theo hướng ngược nhau để xoay robot. Ví dụ, để xoay robot sang phải, bánh xe bên trái sẽ lái về phía trước, trong khi bánh xe bên phải sẽ lái ngược lại.
Thuật ngữ và Giá trị cho Cơ sở Mã:
| Thuật ngữ | Định nghĩa | Trực quan | Công thức | Giá trị |
|---|---|---|---|---|
| Đường kính | Đo một đường thẳng từ tâm của mỗi bánh xe (còn được gọi là chiều dài cơ sở) |  |
d = 2 r | ~ 135 mm hoặc 5,3 in |
| Chu vi | Tổng quãng đường được điều khiển bởi các bánh xe để hoàn thành 360° |  |
C = π d | ~ 424 mm hoặc 16,7 in |
Toán học của bất kỳ bằng cấp nào
Xem video này để tìm hiểu thêm về cách tính số vòng quay cần thiết để robot có thể xoay bất kỳ độ nào.
Chuyển đổi sang độ
Khối [Quay để] sẽ chấp nhận các vòng quay hoặc độ làm tham số. Để sử dụng độ, chỉ cần nhân số lượt với 360. Ví dụ này cho thấy số độ mà động cơ sẽ quay để có thể xoay robot một góc 360. Lưu ý rằng trong dự án này, các động cơ quay theo hướng ngược nhau và 'và đừng đợi' được thêm vào khối đầu tiên để các động cơ quay đồng thời. Thao tác này sẽ xoay robot sang phải cho 360° mong muốn. 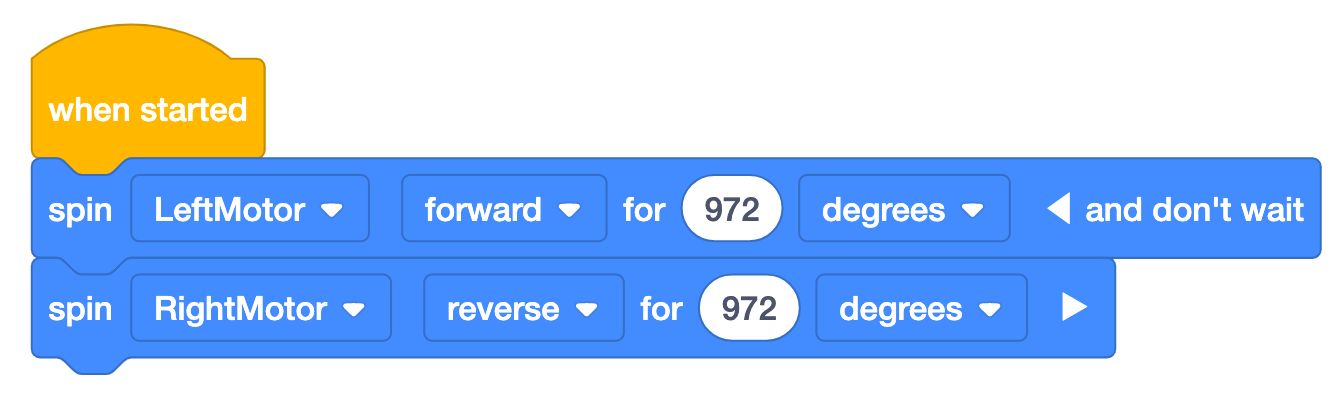
Những quan niệm sai lầm phổ biến
Có một số quan niệm sai lầm mà học sinh có thể có về đo lường và toán học của việc lái xe và rẽ. Sau đây là một số vấn đề phổ biến nhất, kèm theo gợi ý về cách giải quyết với học sinh của bạn.
| Tình huống | Quan niệm sai lầm | Sửa chữa được đề xuất |
|---|---|---|
|
Giáo viên hỏi cả lớp, chúng ta nên nhập gì vào khối [Quay để] làm cho robot quay 90°? Học sinh trả lời “90”. |
Khoảng cách tính bằng độ mà bánh xe đang lái để rẽ bằng với góc rẽ. Học sinh không sử dụng chu vi quay của robot để tính khoảng cách theo độ mà bánh xe phải lái. |
Nhắc nhở học sinh rằng các bánh xe cần phải lái dọc theo chu vi quay, để robot quay. (Trong hình ảnh này, đó là dọc theo vòng tròn màu đỏ từ đường màu vàng này sang đường màu vàng khác.)
Xoay bánh xe chỉ 90°, để giúp học sinh hình dung bánh xe quay bao xa để di chuyển một khoảng cách nhất định. |
|
Giáo viên hỏi cả lớp, chúng ta nên nhập gì vào khối [Quay cho] để robot lái xe 12 inch về phía trước? Học sinh trả lời “12”. |
Số vòng quay của bánh xe bằng với khoảng cách truyền động mong muốn. Học sinh không sử dụng chu vi bánh xe để tính số vòng quay bánh xe để lái khoảng cách mong muốn. |
Nhắc nhở học sinh về việc robot di chuyển bao xa với 1 vòng quay bánh xe và hỏi xem 12 vòng quay có vẻ như quá nhiều hoặc quá ít vòng quay hoàn chỉnh để lái xe 12 inch. Để giúp học viên hình dung rõ hơn điều này, hãy lăn một bánh xe dọc theo thước trong 12 vòng quay, để cho học viên thấy khoảng cách đó là bao xa.
Nhắc nhở học sinh rằng 1 vòng quay là chu vi bánh xe, và 12 inch phải được chia cho chu vi đó. |
| Học sinh đang đo bánh xe, nhưng không có cạnh nào của bánh xe nằm trên vạch 0 của thước. |
Thước đo bắt đầu từ 1, không phải 0. Học sinh không sử dụng thước đo một cách chính xác để có được phép đo chính xác. |
Nhắc nhở học viên rằng thước đo bắt đầu từ dấu ‘0’ và nếu họ không đo từ thời điểm đó, số đo của họ sẽ không chính xác. Anh chị em có thể muốn đánh dấu sự bắt đầu của thước kẻ bằng băng dính hoặc bút đánh dấu màu, như một công cụ hỗ trợ trực quan bổ sung cho học viên khi các em đang làm việc. (Để thực hành thêm với đo lường, sinh viên có thể hoàn thành Hoạt động đo lường thực hành.) |
|
Một sinh viên cho biết dự án của họ không hoạt động. Giáo viên nhận thấy rằng số vòng quay bánh xe chính xác nằm trong khối [Quay cho], nhưng tham số được đặt thành ‘độ’. |
Các đơn vị hoặc thông số có thể hoán đổi cho nhau. Các sinh viên không tham dự vào các thông số/đơn vị đo lường trong dự án của họ. |
Hỏi học viên xem các em đang sử dụng đơn vị đo lường nào và liệu đơn vị đo lường đó có khớp với thông số trong khối hay không.
|
| Một học sinh cố gắng nhập ‘21/4’ vào tham số của khối [Quay cho], để nhập “2 ¼ lượt”. |
Phân số và số thập phân được viết theo cùng một cách. Học sinh không chuyển đổi phân số thành số thập phân. |
Nhắc nhở sinh viên rằng họ cần chuyển đổi phân số thành số thập phân để chúng có thể nhận ra các tham số. Để thực hiện việc này, hãy chia tử số cho mẫu số. 2 ¼=94 =2,25 Bạn có thể yêu cầu học sinh lập biểu đồ các giá trị phân số thường dùng và số thập phân tương đương để tạo ra nguồn tài nguyên của riêng mình. |
|
Giáo viên yêu cầu học sinh chia sẻ phép tính chu vi bánh xe của họ. Học sinh trả lời |
Chu vi được tính toán bằng cách sử dụng bán kính -πxbán kính. Học sinh đang sử dụng sai phép đo trong tính toán. |
Nhắc học sinh rằng chu vi làπ x đường kính; và đường kính là đường thẳng đi qua tâm bánh xe (hoặc gấp đôi bán kính).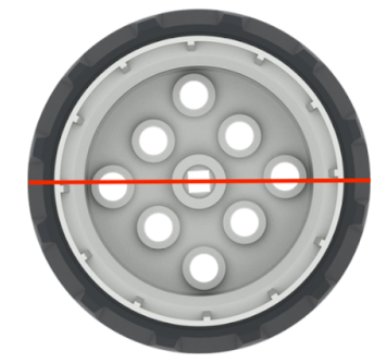 Bạn có thể muốn đo và tính giá trị như một hoạt động toàn lớp nếu nhiều học sinh gặp khó khăn khi sử dụng các công thức. |


 Nhắc nhở học viên rằng các phép tính của các em sẽ chỉ hoạt động như dự định nếu thông số được đặt thành đơn vị chính xác. Lượt và độ không giống nhau về giá trị.
Nhắc nhở học viên rằng các phép tính của các em sẽ chỉ hoạt động như dự định nếu thông số được đặt thành đơn vị chính xác. Lượt và độ không giống nhau về giá trị.
Ví dụ về các giải pháp
Bài tập mẫu Lab 4
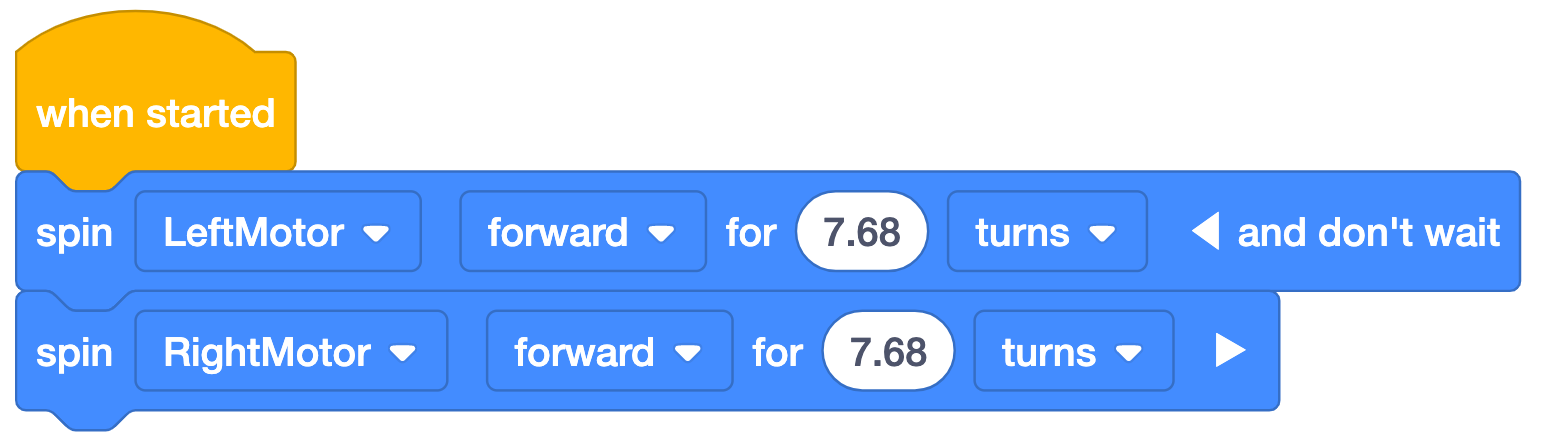
*Lưu ý: 'và đừng đợi' được sử dụng với khối đầu tiên trong dự án ví dụ để cả hai khối sẽ thực thi đồng thời. Nếu không có ‘và đừng chờ đợi’, động cơ đầu tiên sẽ quay, sau đó là động cơ thứ hai và Cơ sở mã sẽ không lái xe như dự định. Hãy chắc chắn rằng học sinh 'KHÔNG sụp đổ' và không chờ đợi 'nếu không dự án của họ sẽ không chạy như dự định.

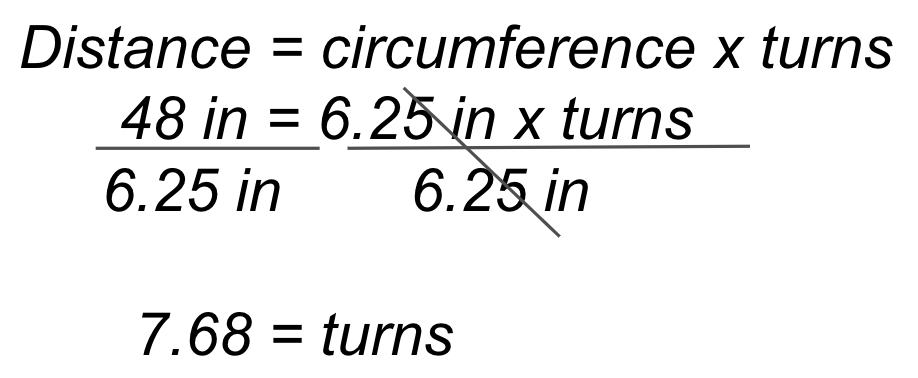
Để lái xe theo chiều dài 48 inch (~122 cm) của tuyến đường diễu hành, Code Base sẽ cần di chuyển ~7,68 vòng. Phép tính được hiển thị ở bên trái và giải pháp VEXcode GO mẫu ở bên phải.
Bài tập mẫu số 5
Để điều khiển chiều dài 48 inch (~122 cm) của tuyến đường diễu hành và rẽ 180 độ, Code Base sẽ cần di chuyển về phía trước trong ~7,68 lượt, sau đó quay một động cơ về phía trước và ngược lại trong ~ 1,47 lượt. Tính toán được hiển thị cùng với ví dụ về giải pháp VEXcode GO ở bên phải.
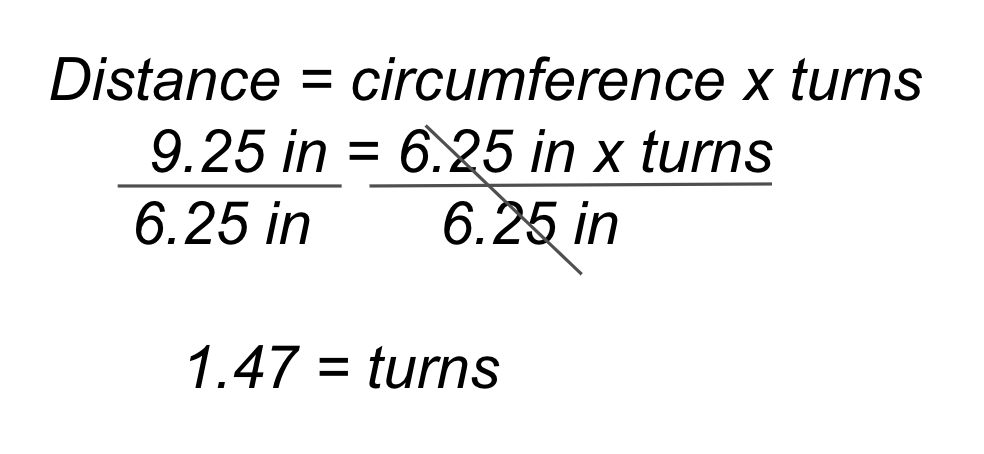
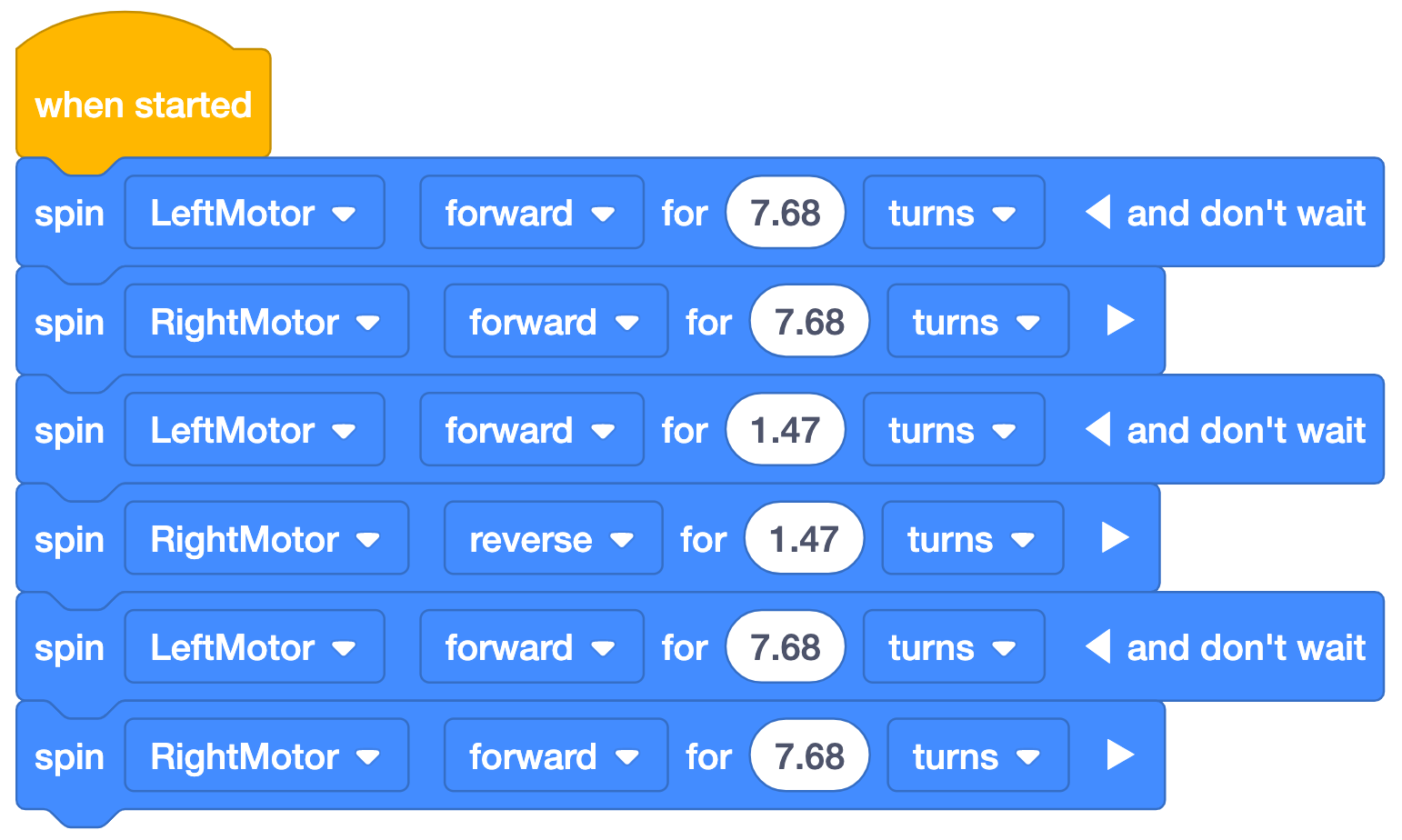
Lưu ý: Để sử dụng độ thay vì số vòng, hãy nhân phép tính số vòng với 360.
Tuyến diễu hành mở rộng
Nếu học viên cần thêm một thử thách, anh chị em có thể mở rộng tuyến đường diễu hành theo nhiều cách khác nhau. Đây là một ví dụ, với một giải pháp khả thi.
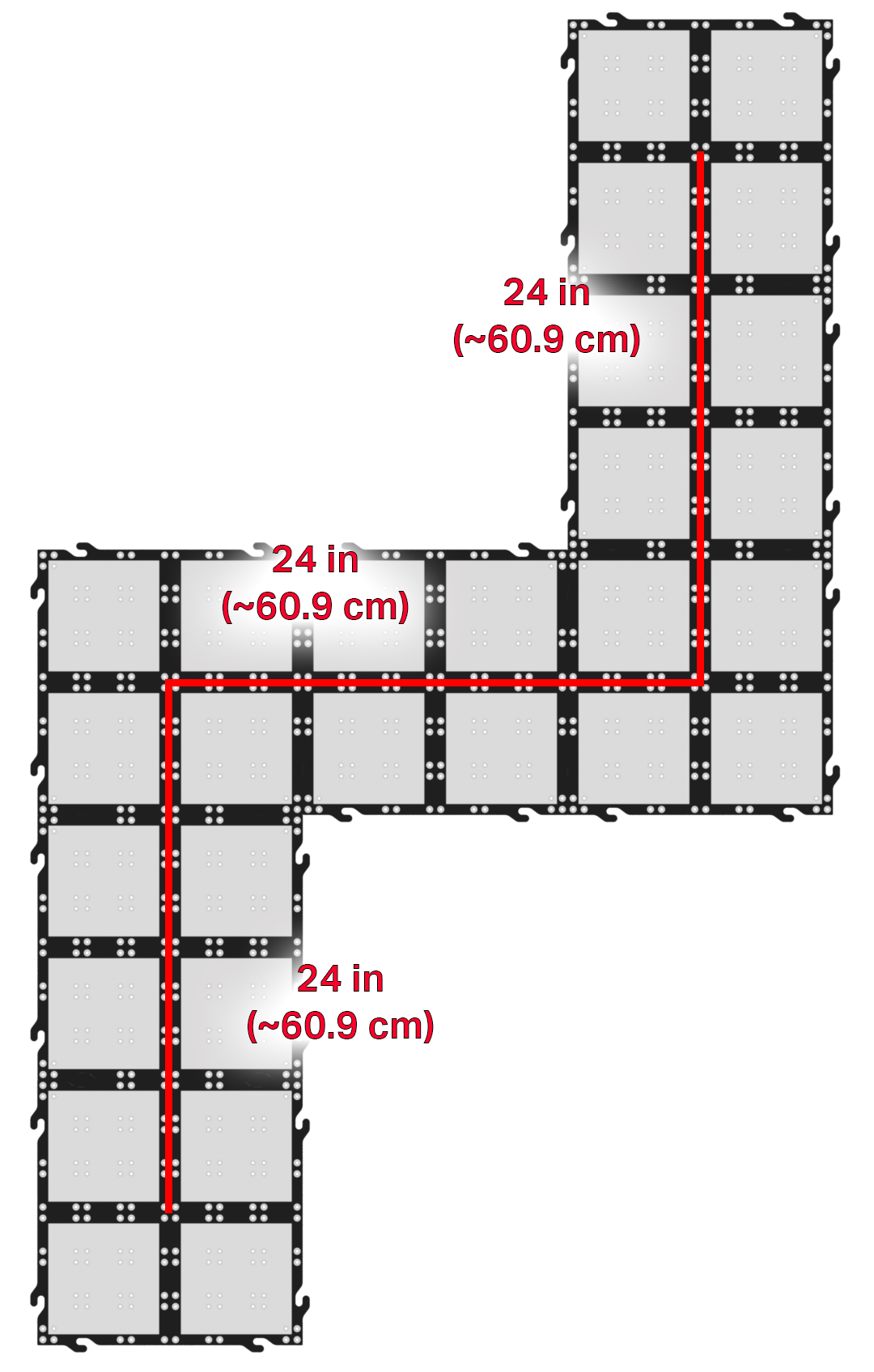
Trong tuyến đường ví dụ này, khoảng cách lái xe và ngã rẽ được giảm một nửa từ Phòng thí nghiệm. Tuy nhiên, trong tuyến đường này, hướng của các ngã rẽ là vấn đề. Ngoài việc tính toán lại, học sinh sẽ phải tìm ra hướng quay bánh xe để đi theo hướng mong muốn.
Các phép tính đã giảm một nửa từ các Phòng thí nghiệm trước như sau:
Khoảng cách lái xe = ~ 3,84 vòng
Khoảng cách quay đầu = ~ 0,73 vòng
Các giá trị này được sử dụng trong ví dụ sau về giải pháp VEXcode GO:
