
Supporto matematico
Durante l'insegnamento dei laboratori 4 e 5, vengono coinvolti ulteriori concetti matematici e calcoli. Questa pagina offre agli insegnanti risorse di base utili a supportare la matematica che gli studenti esplorano in questi laboratori.
Matematica della guida
Per completare la sfilata nel Lab 4, gli studenti guideranno il loro carro Code Base lungo un percorso
rettilineo. Invece di utilizzare blocchi di trasmissione che muovono entrambe le ruote contemporaneamente,
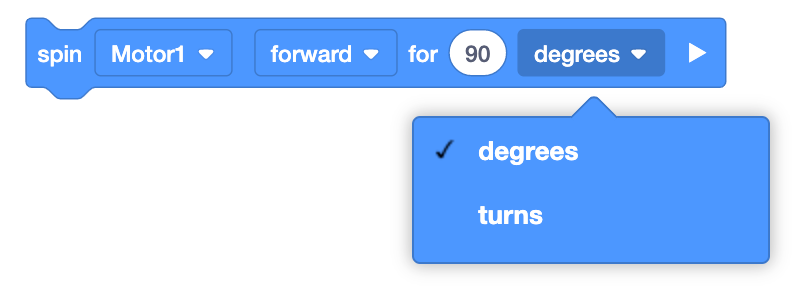
gli studenti utilizzeranno i blocchi [Spin for] in VEXcode GO, come mostrato qui, per far girare i motori
collegati alle ruote e far avanzare il robot. I blocchi [Spin for] accettano 'giri' o 'gradi' come
parametri. Nel laboratorio 4, gli studenti calcoleranno il numero di svolte da inserire nel progetto per
guidare il loro robot lungo la distanza del percorso della parata.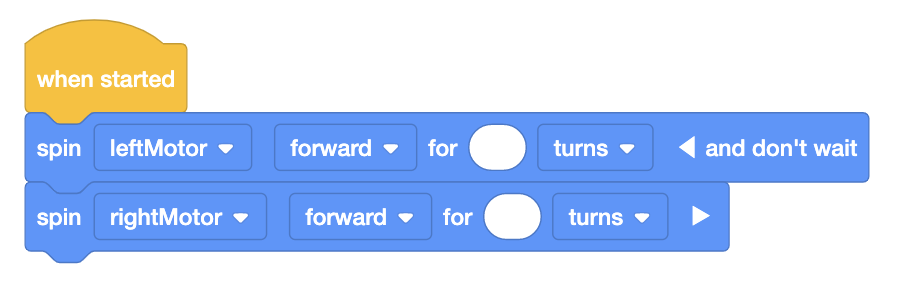
Guarda il video qui sotto per scoprire come calcolare il numero di giri della ruota necessari per far muovere il tuo robot in linea retta per una determinata distanza.
Riferimenti utili:
Terminologia e valori per le ruote grigie:
| Termine | Definizione | Visivo | Formula | Valore |
|---|---|---|---|---|
| Diametro | Misurazione di una linea retta attraverso il centro di un cerchio | 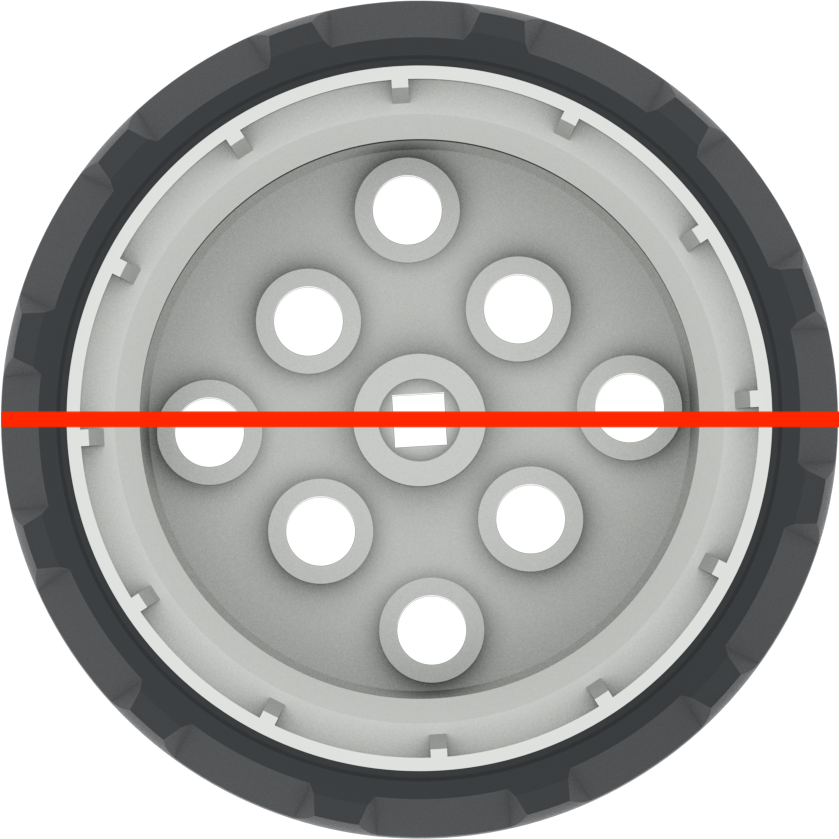 |
d = 2 r | ~ 50,93 mm o 2 pollici |
| Circonferenza | La distanza totale attorno all'esterno di un cerchio |  |
C = πd | ~ 160 mm o 6,25 pollici |
Misurazione accurata
Quando gli studenti effettuano le misurazioni, assicuratevi di guidarli affinché misurino con attenzione e precisione. Puoi usare il VEX GO stampabile Governate per consentire agli studenti di misurare o ai righelli della classe.
- Ricordare agli studenti di iniziare la misurazione dal punto zero sul righello e di prestare molta attenzione al punto finale dell'oggetto che stanno misurando. Iniziare o terminare le misurazioni in modo non accurato influirà sui calcoli e sul movimento finale del robot.
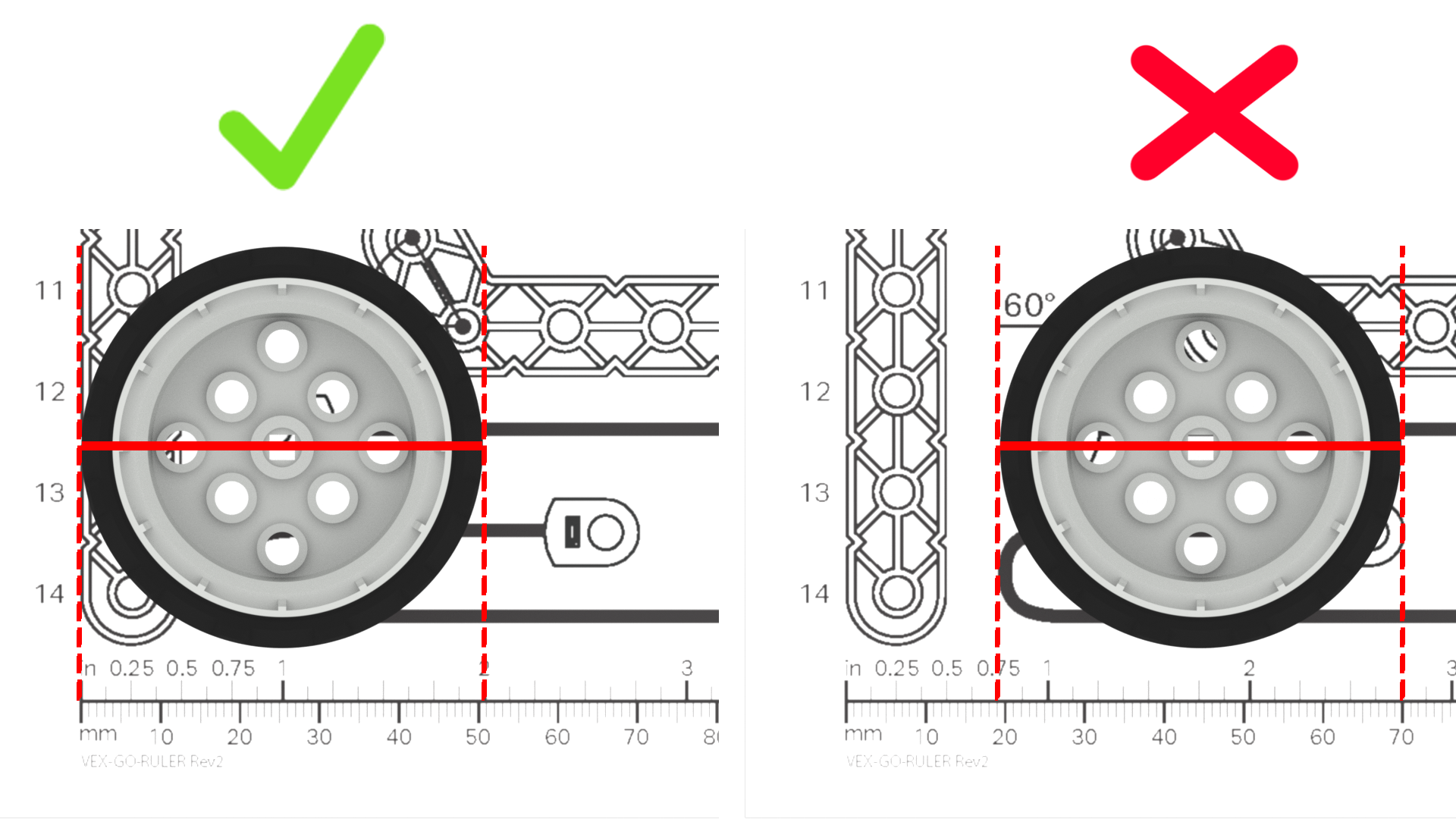
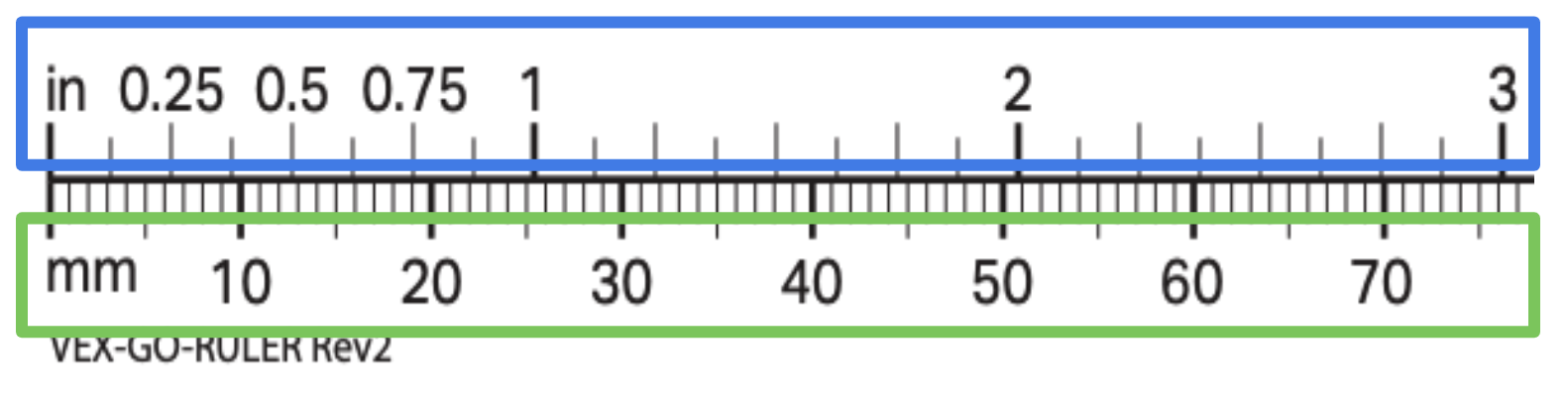
- Assicuratevi che gli studenti sappiano come leggere i segni sul righello che stanno utilizzando, per poter misurare con precisione. Se i righelli che stai utilizzando hanno entrambi i gradi imperiali e unità metriche (es il VEX GO stampabile Governate)assicurarsi che gli studenti utilizzino costantemente le stesse unità di misura.
- Gli studenti possono arrotondare le loro misure all'unità più vicina, o a una frazione di unità. Se necessario, l'arrotondamento può semplificare i calcoli, ma può anche rendere le misurazioni meno precise. Ad esempio, potresti chiedere agli studenti di arrotondare al mezzo pollice o centimetro più vicino, ma il loro robot si sposterà leggermente più lontano di quanto inizialmente previsto. In alternativa, puoi chiedere agli studenti di misurare la distanza con un'approssimazione di ⅛ di pollice o di millimetro e di scoprire che i loro robot si spostano più vicino alla distanza prevista.
- If students need extra practice with measuring, you can use the Practice Measuring VEX GO Activity with individual students or groups, or as a whole class activity.
Matematica della rotazione di 360°
Per completare la sfilata nel Lab 5, gli studenti guideranno il loro carro Code Base lungo un percorso della sfilata con una curva.
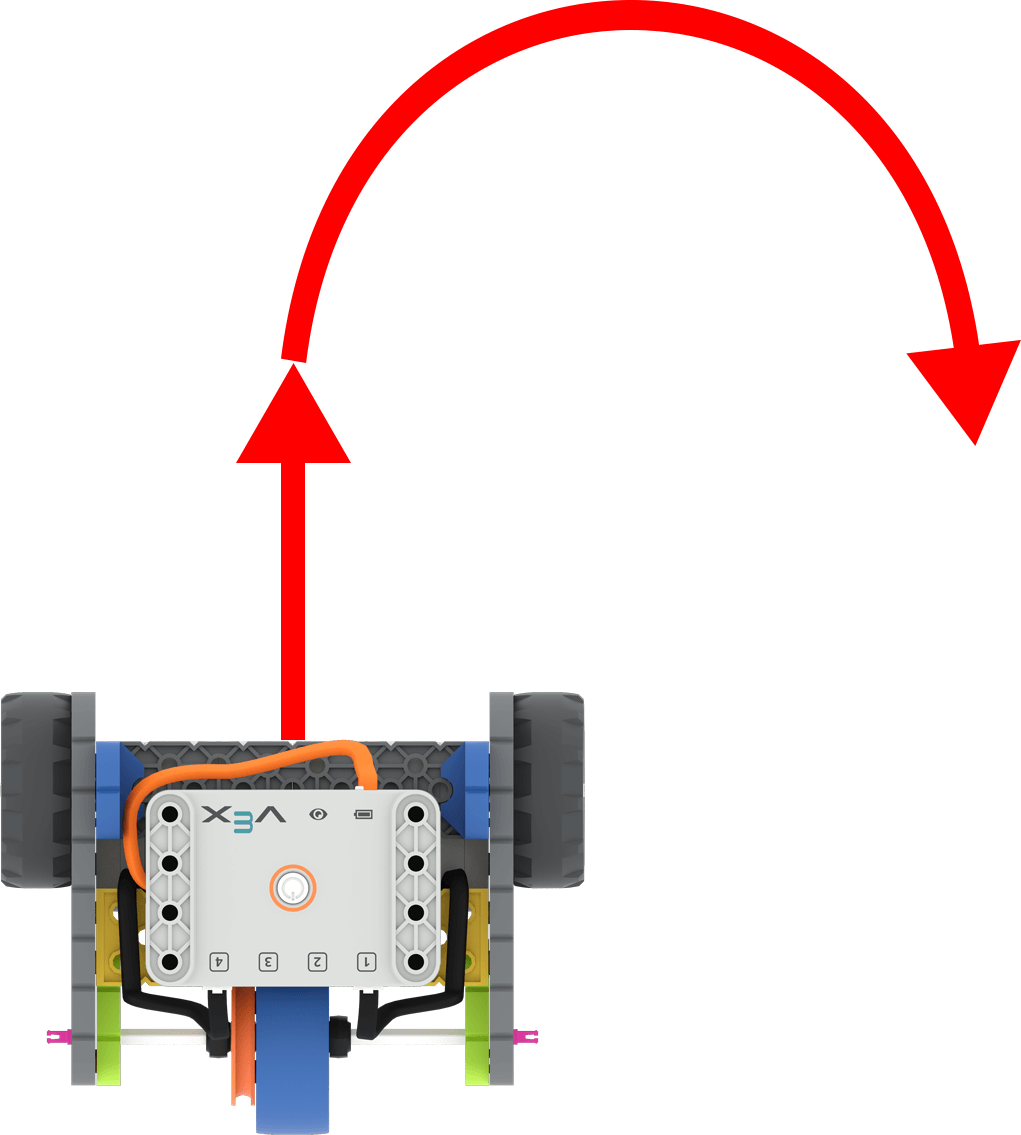
Codice base con frecce per mostrare la guida in avanti e poi la svolta a destra
Gli studenti svilupperanno quanto appreso sulla programmazione del robot per percorrere una distanza in
linea retta, per percorrere una distanza non lineare o per svoltare. Gli studenti stanno ancora calcolando
il numero di svolte necessarie per percorrere una determinata distanza, quindi useranno la stessa formula
del laboratorio precedente.
Guarda il video qui sotto per scoprire insieme ai tuoi studenti come calcolare il numero di giri delle ruote necessari per far compiere al robot un giro di°.
Riferimenti utili:
Quando la base di codice gira, le ruote motrici si muovono in direzioni opposte per far girare il robot. Ad esempio, per girare il robot verso destra, la ruota sinistra andrà in avanti, mentre quella destra andrà in retromarcia.
Terminologia e valori per la base di codice:
| Termine | Definizione | Visivo | Formula | Valore |
|---|---|---|---|---|
| Diametro | Misurazione di una linea retta dal centro di ciascuna ruota (noto anche come passo) | 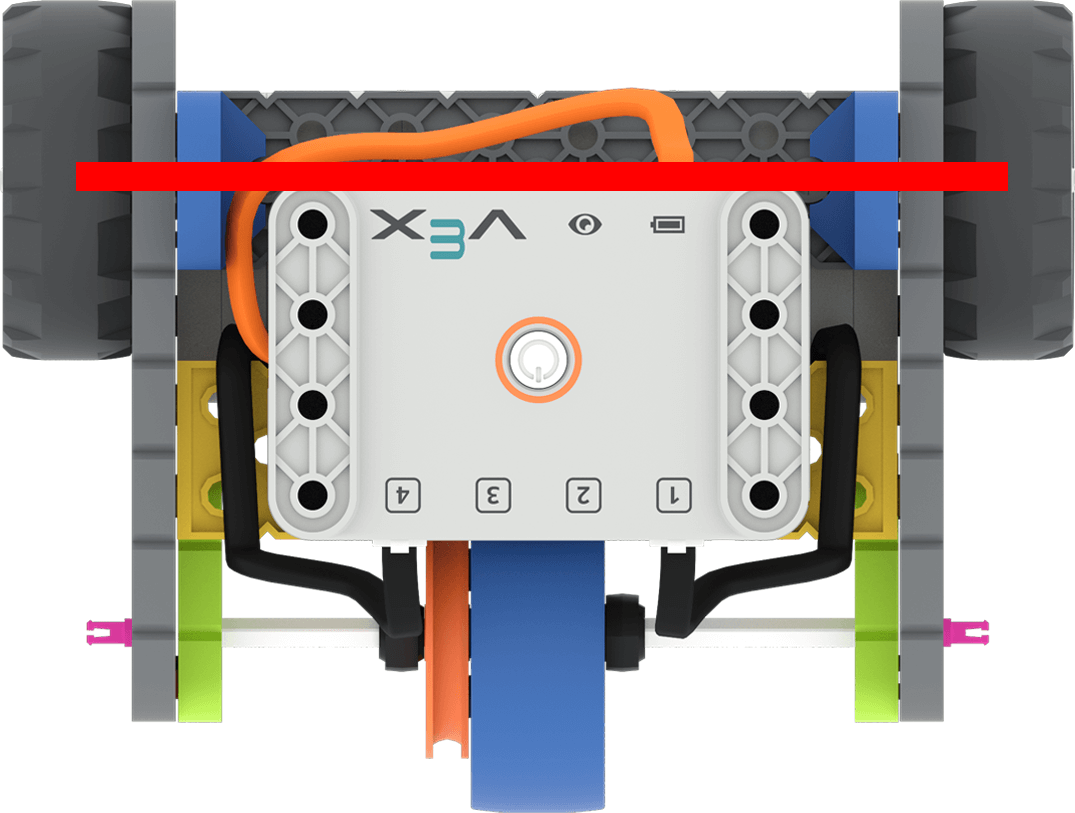 |
d = 2 r | ~ 135 mm o 5,3 pollici |
| Circonferenza | La distanza totale percorsa dalle ruote per completare un giro di 360° | 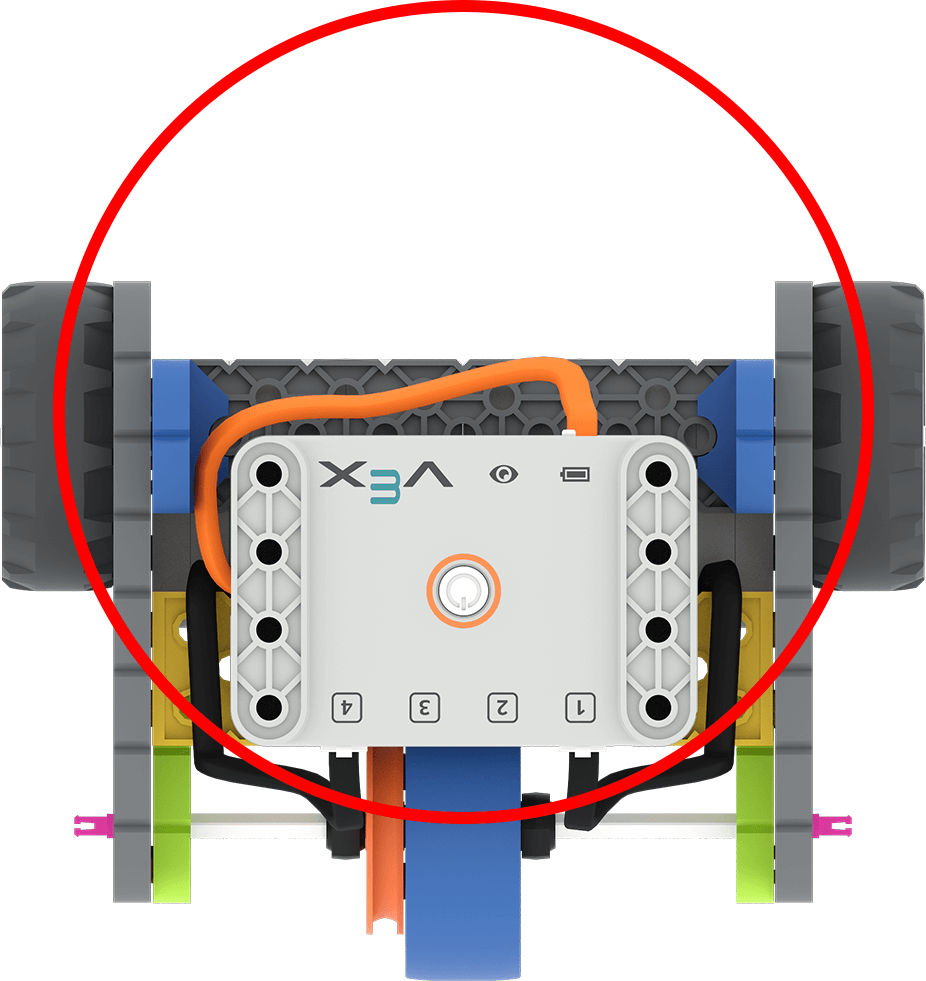
|
C = πd | ~ 424 mm o 16,7 pollici |
Matematica per ruotare qualsiasi grado
Guarda questo video per saperne di più sul calcolo del numero di giri della ruota necessari al robot per girare di qualsiasi grado.
Conversione in gradi
Il blocco [Spin for] accetterà giri o gradi come parametri. Per
usare i gradi, basta moltiplicare il numero di giri per 360. Questo esempio mostra di quanti gradi
ruoteranno i motori per far ruotare il robot di°. Si noti che in questo progetto i motori
girano in direzioni opposte e che "e non aspettare" viene aggiunto al primo blocco, quindi i motori girano
simultaneamente. In questo modo il robot ruoterà verso destra per i 360° desiderati. 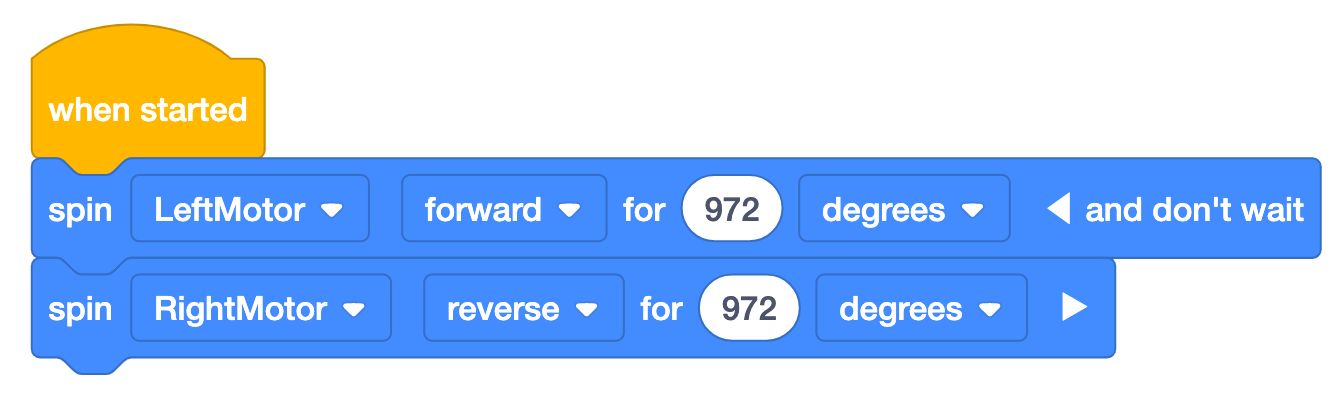
Idee sbagliate comuni
Ci sono diversi equivoci che gli studenti possono avere riguardo alle misurazioni e alla matematica della guida e delle svolte. Ecco alcuni dei più comuni, con suggerimenti su come affrontarli con i tuoi studenti.
| Situazione | Idea sbagliata | Correzione suggerita |
|---|---|---|
|
L'insegnante chiede alla classe cosa dovremmo inserire nel blocco [Gira per] per far girare il robot di 90°? Lo studente risponde “90”. |
La distanza in gradi percorsa dalla ruota per sterzare è uguale all'angolo di sterzata. Gli studenti non utilizzano la circonferenza di sterzata del robot per calcolare la distanza in gradi che la ruota deve percorrere. |
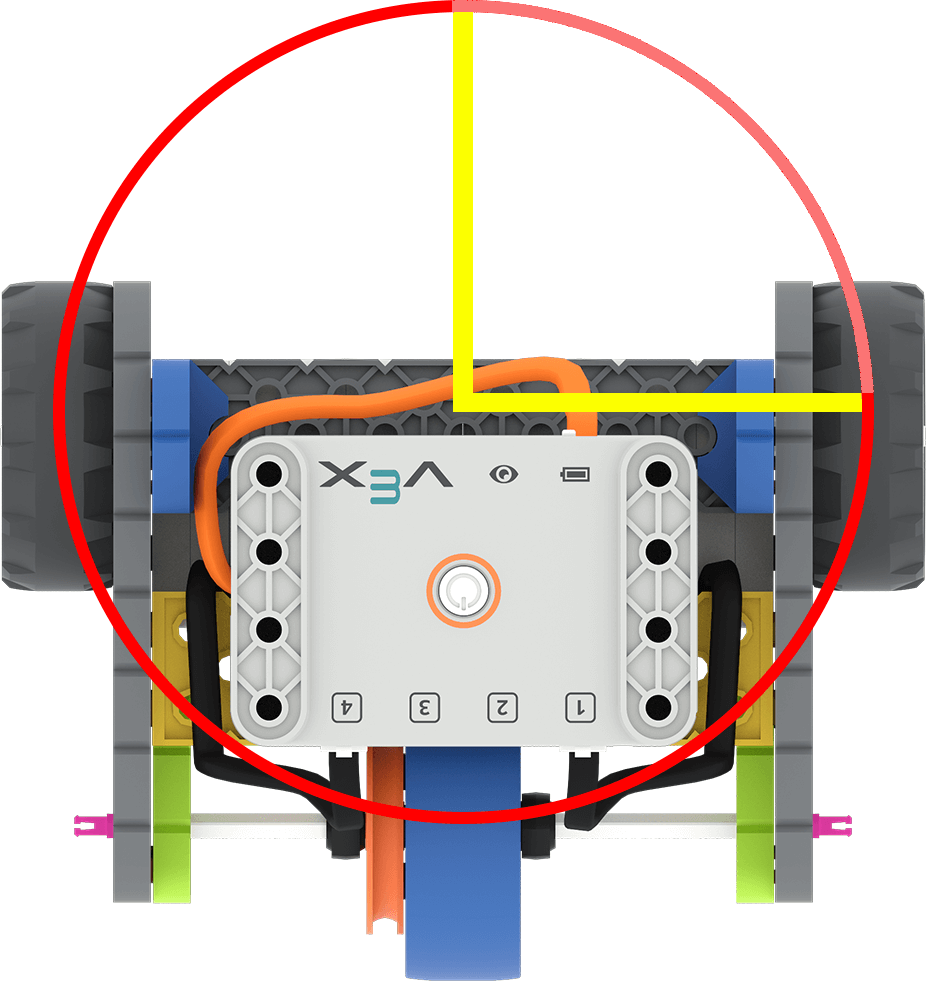
Ricordare agli studenti che affinché il robot possa girare, le ruote devono muoversi lungo la circonferenza di svolta. (In questa immagine, si tratta del cerchio rosso, da una linea gialla all'altra.)
Girare la ruota di soli 90° per aiutare gli studenti a visualizzare la distanza percorsa dalla ruota per percorrere una determinata distanza. |
|
L'insegnante chiede alla classe cosa dovremmo inserire nel blocco [Gira per] per far avanzare il robot di 12 pollici? Lo studente risponde “12”. |
Il numero di giri della ruota è pari alla distanza di percorrenza desiderata. Lo studente non utilizza la circonferenza della ruota per calcolare il numero di giri della ruota necessari per percorrere la distanza desiderata. |
Ricordare agli studenti di quanto si muove il robot con un giro di ruota e chiedere se 12 giri completi sembrano troppi o troppo pochi per percorrere 12 pollici. Per aiutare gli studenti a visualizzarlo meglio, fate girare una ruota lungo un righello per 12 giri, per mostrare loro quanto è lunga quella distanza.
Ricorda agli studenti che 1 giro di ruota è la circonferenza della ruota e che 12 pollici devono essere divisi per quella circonferenza. |
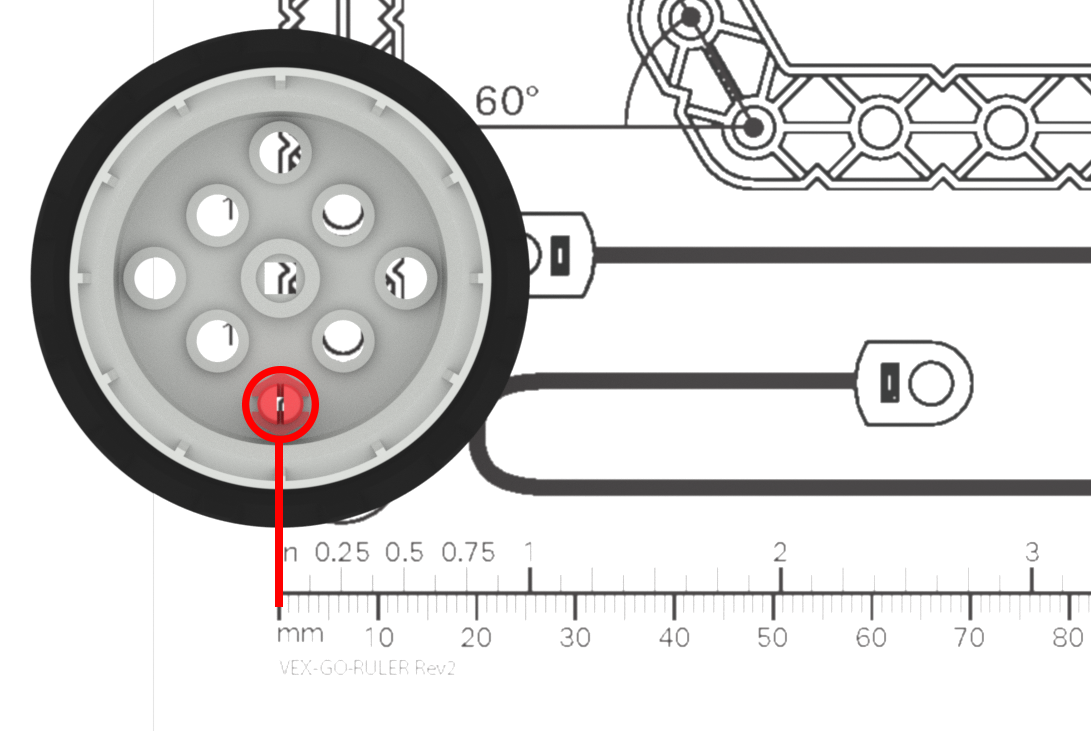
| Lo studente sta misurando la ruota, ma nessuno dei due bordi della ruota è sul segno zero del righello |
Il righello inizia da 1, non da zero. Lo studente non utilizza correttamente il righello per ottenere una misurazione accurata. |
Ricordare agli studenti che il righello inizia dal segno "0" e che se non misurano da quel punto, le loro misurazioni saranno errate. Per fornire agli studenti un ulteriore ausilio visivo durante il lavoro, è possibile contrassegnare l'inizio del righello con del nastro adesivo o un pennarello colorato. (Per extra pratica con la misurazione, gli studenti possono completare il Pratica Attività di misurazione.) |
|
Uno studente dice che il suo progetto non funziona. L'insegnante nota che il numero corretto di giri della ruota è nel blocco [Gira per], ma il parametro è impostato su "gradi". |
Le unità o i parametri sono intercambiabili. Gli studenti non prestano attenzione ai parametri/unità di misura nel loro progetto. |
Chiedere agli studenti quale unità di misura stanno utilizzando e se questa corrisponde al parametro nel blocco.
|
| Uno studente prova a immettere '21/4' nel parametro del blocco [Spin for], per immettere "2 ¼ giri". |
Le frazioni e i numeri decimali si scrivono nello stesso modo. Lo studente non sta convertendo la frazione in un numero decimale. |
Ricordare agli studenti che devono convertire le frazioni in decimali affinché siano parametri
riconoscibili. Per fare ciò, dividi il numeratore per il denominatore. 2 ¼=94 =2,25 Potresti chiedere agli studenti di rappresentare graficamente i valori frazionari usati di frequente e i loro equivalenti decimali per creare le proprie risorse. |
|
L'insegnante chiede agli studenti di condividere il calcolo della circonferenza della ruota. Risposte degli studenti |
La circonferenza viene calcolata utilizzando il raggio -πxraggio. Lo studente utilizza la misura sbagliata nel calcolo. |
Remind students that the circumference is π x
diameter; and the diameter is a straight line across the center
of the wheel (or twice the radius).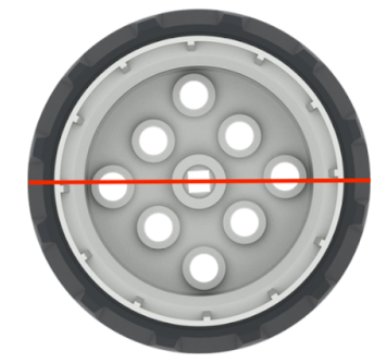 Potresti voler misurare e calcolare il valore come attività dell'intera classe se molti studenti hanno difficoltà con l'uso delle formule. |
 Ricordare agli studenti che i loro calcoli funzioneranno come previsto
solo se il parametro è impostato sull'unità corretta. Giri e gradi non hanno lo stesso valore.
Ricordare agli studenti che i loro calcoli funzioneranno come previsto
solo se il parametro è impostato sull'unità corretta. Giri e gradi non hanno lo stesso valore.
Soluzioni di esempio
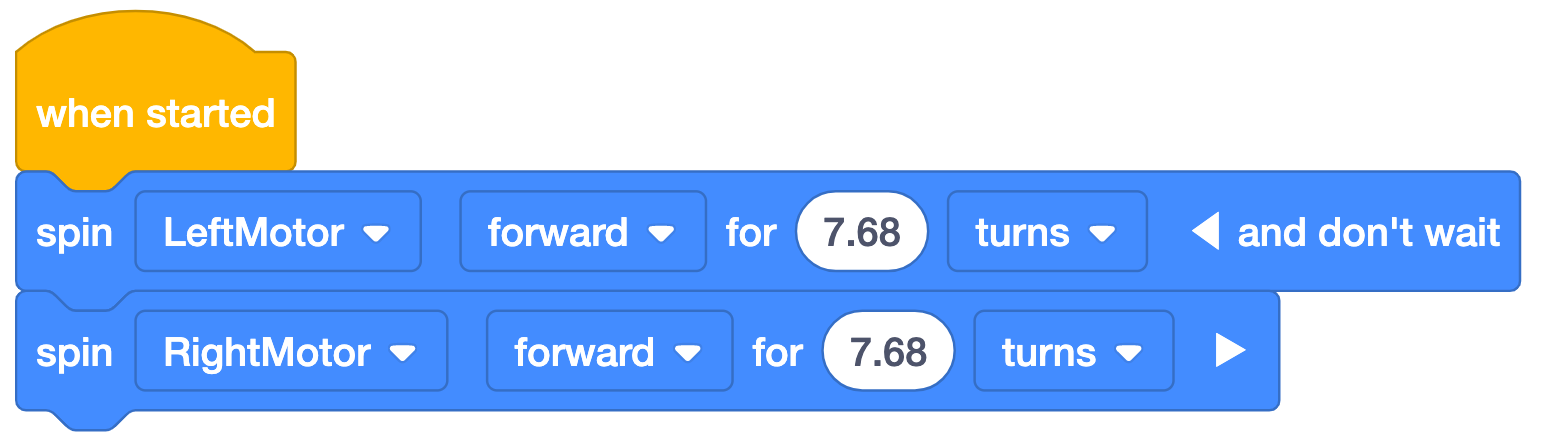
Lab 4 Esempio di soluzione
*Nota: "e non aspettare" viene utilizzato con il primo blocco nel progetto di esempio in modo che entrambi i blocchi vengano eseguiti simultaneamente. Senza "e non aspettare", il primo motore girerebbe, poi il secondo e la base di codice non funzionerebbe come previsto. Assicuratevi che gli studenti NON nascondano la dicitura "e non aspettare", altrimenti il loro progetto non verrà eseguito come previsto.

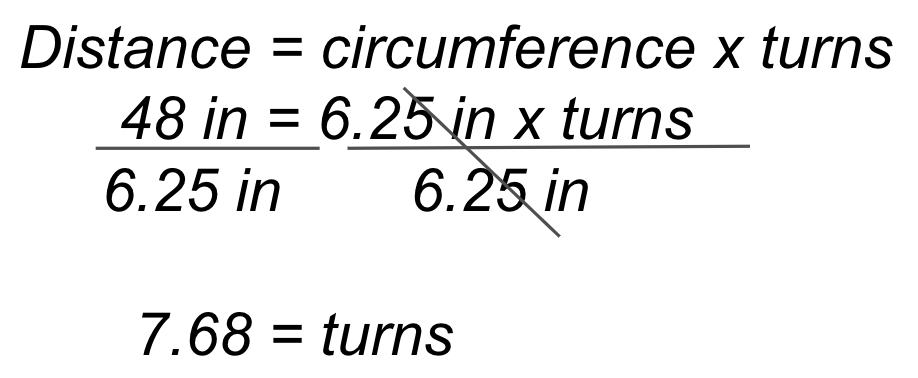
Per percorrere i 48 pollici (~122 cm) del percorso della parata, il Code Base dovrà percorrere
~7,68 curve. Il calcolo è mostrato a sinistra, mentre l'esempio della soluzione VEXcode GO
è mostrato a destra.
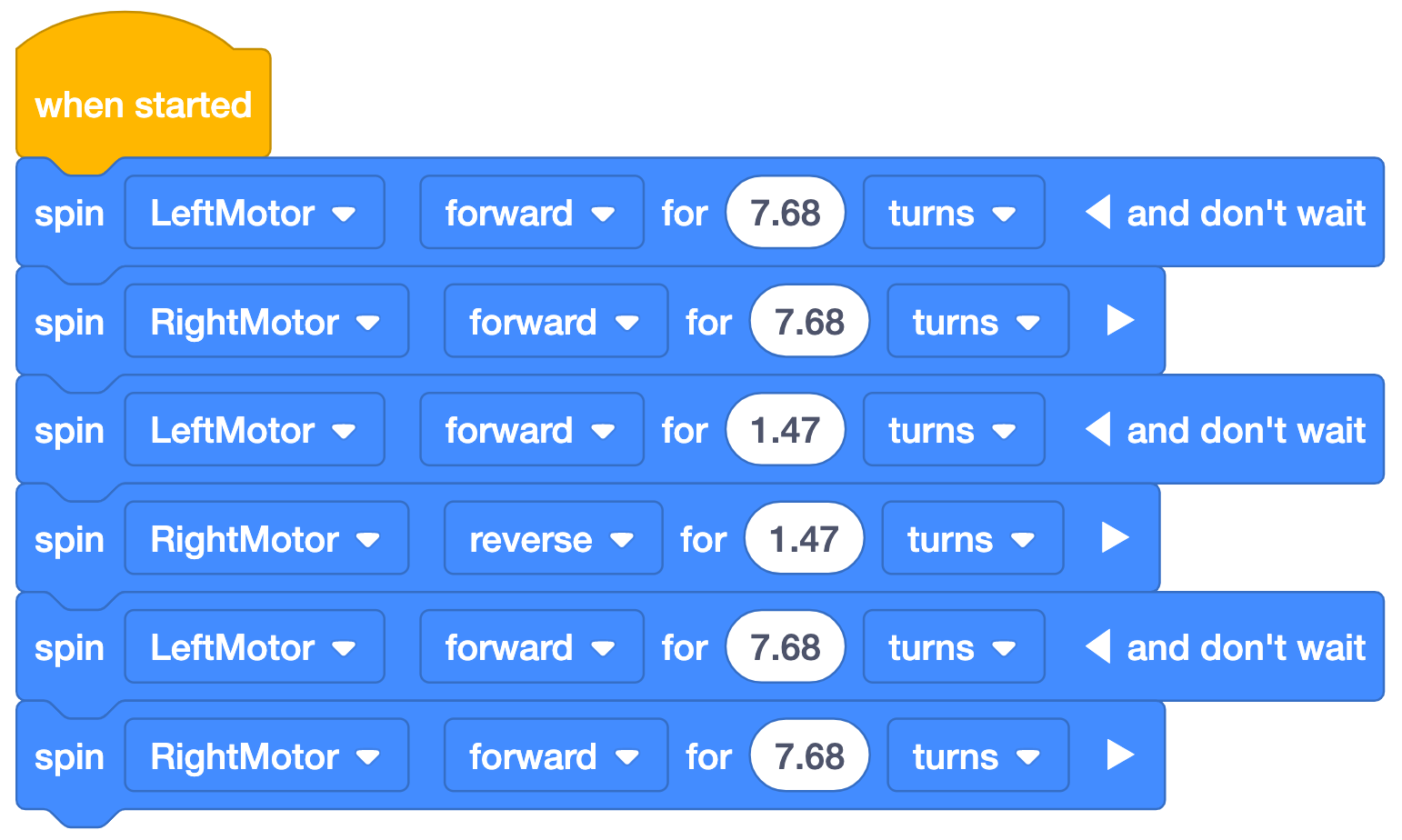
Lab 5 Esempio di soluzione
Per percorrere i 48 pollici (~122 cm) di lunghezza del percorso della parata e girare di 180 gradi, il Code Base dovrà procedere in avanti per ~7,68 svolte, quindi girare un motore in avanti e l'altro indietro per ~1,47 svolte. Il calcolo è mostrato accanto all'esempio di soluzione VEXcode GO sulla destra.
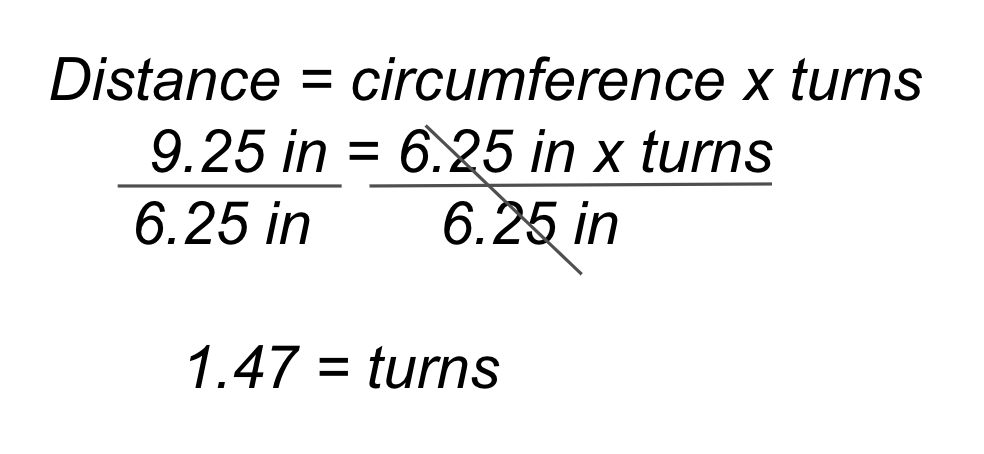
Nota: per usare i gradi invece delle svolte, moltiplicare per 360.
Estensione percorso sfilata
Se gli studenti hanno bisogno di una sfida in più, è possibile estendere il percorso della parata in molti modi diversi. Questo è un esempio, con una possibile soluzione.
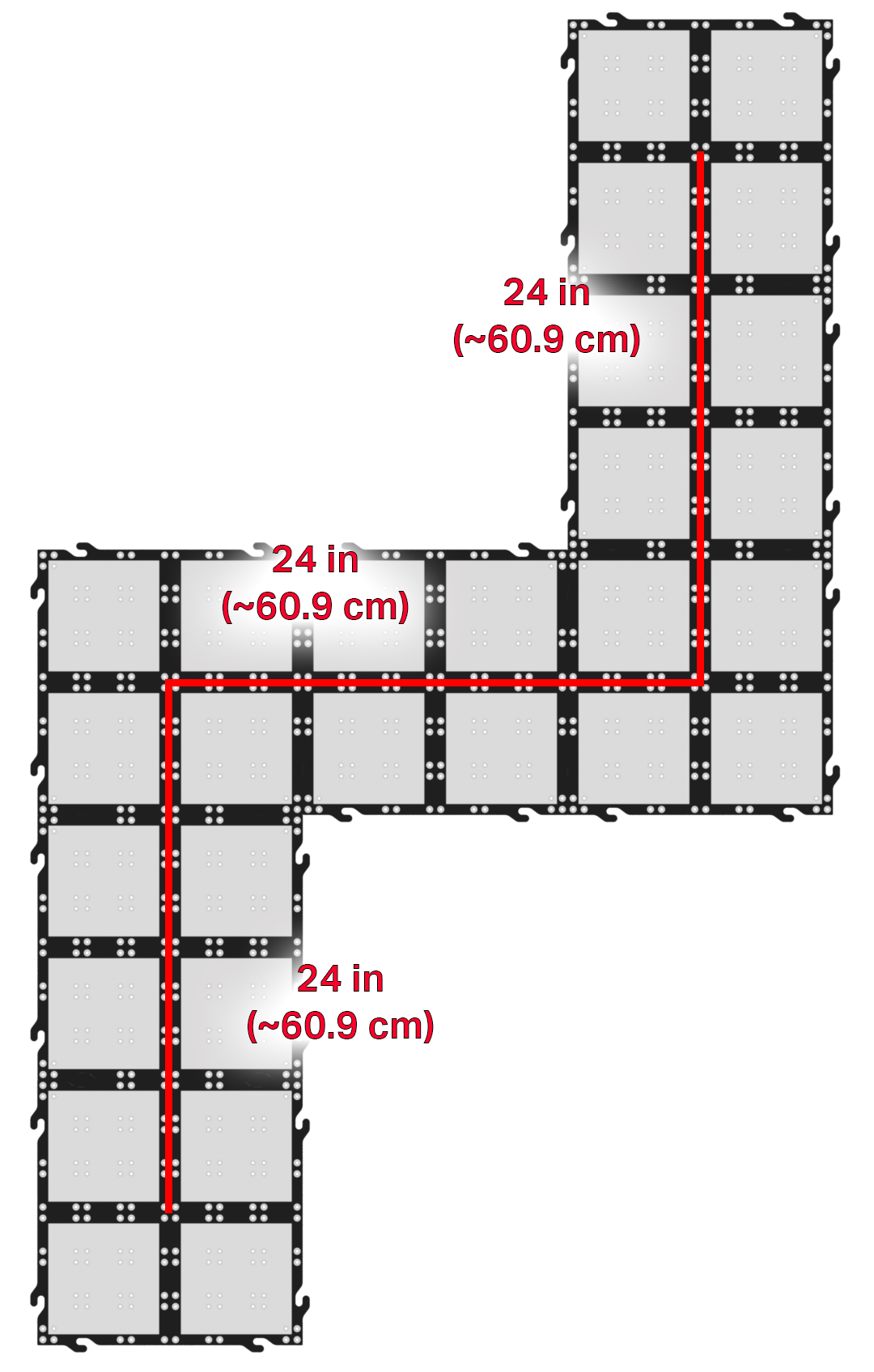
In questo percorso di esempio, le distanze di guida e le svolte sono dimezzate rispetto ai Labs. In questo
percorso, tuttavia, la direzione delle svolte è importante. Oltre a ricalcolare, gli studenti dovranno
capire in che direzione far girare le ruote per girare nella direzione desiderata.
I calcoli
dimezzati dei laboratori precedenti sono i seguenti:
Distanza di guida = ~ 3,84 svolte
Distanza di svolta = ~ 0,73 svolte
Questi valori vengono utilizzati nel seguente esempio di soluzione VEXcode GO:
