
গণিত সহায়তা
ল্যাব ৪ এবং ৫ পড়ানোর সময়, অতিরিক্ত গণিতের ধারণা এবং গণনা জড়িত থাকে। এই পৃষ্ঠাটি শিক্ষকদের জন্য প্রাসঙ্গিক পটভূমির সংস্থান প্রদান করে যা শিক্ষার্থীরা এই ল্যাবগুলিতে যে গণিত অন্বেষণ করছে তা সমর্থন করে।
ড্রাইভিং এর গণিত
ল্যাব ৪-এ প্যারেড সম্পন্ন করার জন্য, শিক্ষার্থীরা তাদের কোড বেস ফ্লোটটি সোজা প্যারেড রুট দূরত্ব ধরে চালাবে। একই সাথে উভয় চাকা চলাচলকারী ড্রাইভট্রেন ব্লক ব্যবহার করার পরিবর্তে, শিক্ষার্থীরা VEXcode GO-তে [Spin for] ব্লক ব্যবহার করবে, যেমনটি এখানে দেখানো হয়েছে, চাকার সাথে সংযুক্ত মোটরগুলিকে ঘোরাতে এবং রোবটটিকে এগিয়ে নিয়ে যেতে। [স্পিন ফর] ব্লকগুলি 'টার্নস' বা 'ডিগ্রি' কে প্যারামিটার হিসেবে গ্রহণ করে। ল্যাব ৪-এ, শিক্ষার্থীরা তাদের রোবটকে প্যারেড রুটের দূরত্বে চালানোর জন্য এই প্রকল্পে ইনপুট করার জন্য কতগুলি বাঁক নেওয়া হবে তা গণনা করবে।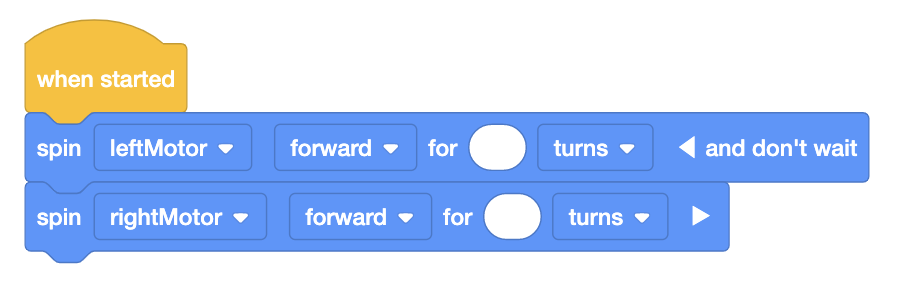
আপনার রোবটকে একটি নির্দিষ্ট দূরত্বে সোজা করে চালানোর জন্য প্রয়োজনীয় চাকা ঘুরানোর সংখ্যা কীভাবে গণনা করবেন তা জানতে নীচের ভিডিওটি দেখুন।
সহায়ক তথ্যসূত্র:
ধূসর চাকাগুলির পরিভাষা এবং মান:
| পদ | সংজ্ঞা | ভিজ্যুয়াল | সূত্র | মূল্য |
|---|---|---|---|---|
| ব্যাসার্ধ | একটি বৃত্তের কেন্দ্র জুড়ে একটি সরল রেখার পরিমাপ | 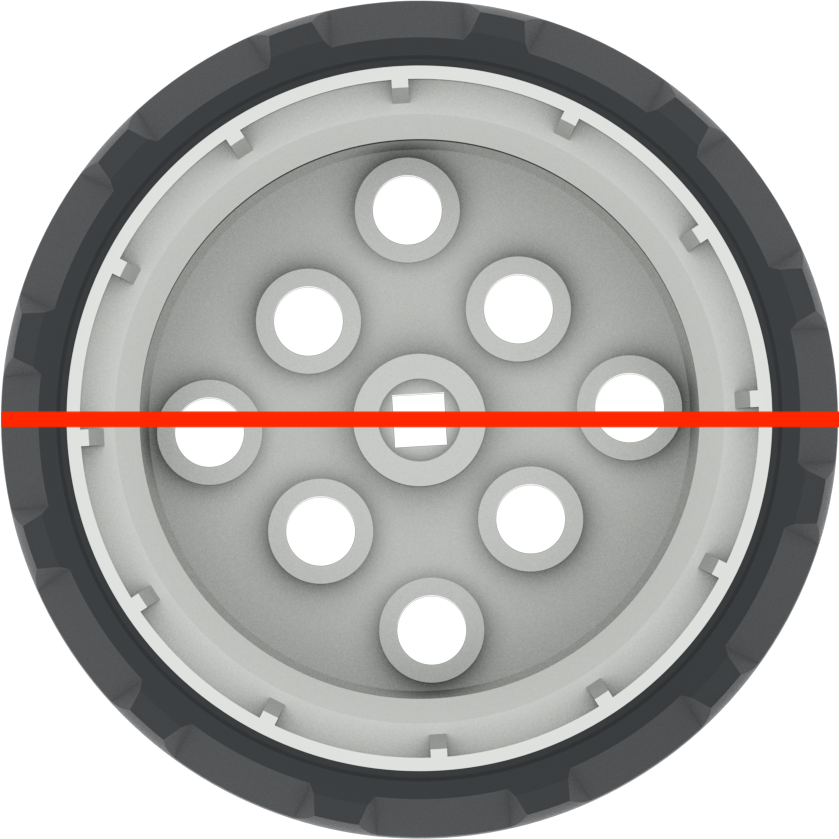 |
d = 2 r | ~ 50.93 mm বা 2 in |
| পরিধি | একটি বৃত্তের বাহিরের চারপাশের মোট দূরত্ব |  |
C = π d | ~ 160 মিমি বা 6.25 ইঞ্চি |
সঠিকভাবে পরিমাপ করা
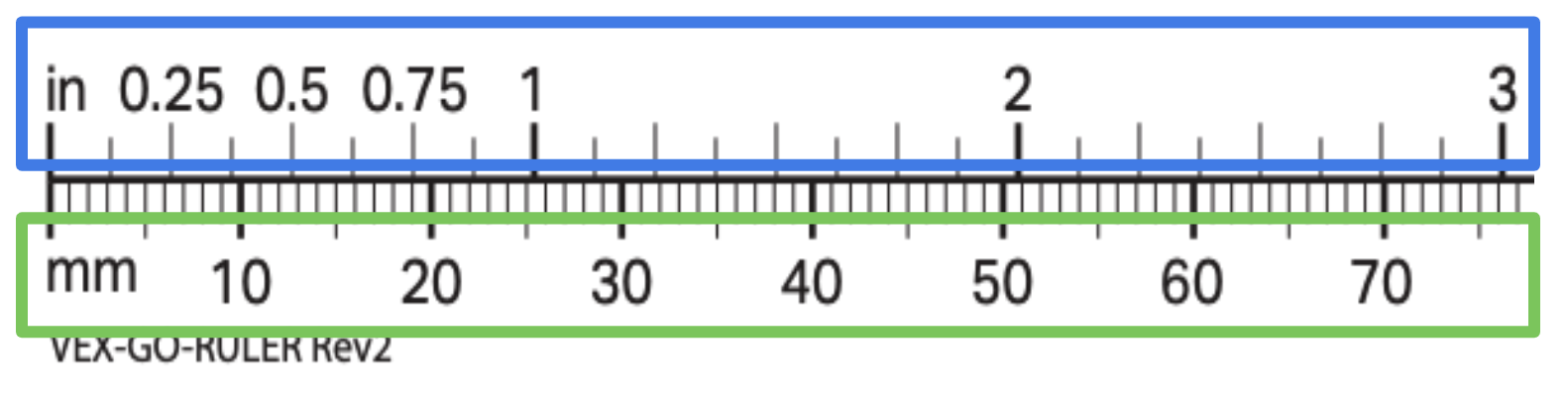
শিক্ষার্থীরা যখন পরিমাপ করছে, তখন সাবধানে এবং সঠিকভাবে পরিমাপ করার জন্য তাদের গাইড করতে ভুলবেন না । আপনি শিক্ষার্থীদের পরিমাপের জন্য VEX GO প্রিন্টেবল রুলার, অথবা শ্রেণীকক্ষের রুলারব্যবহার করতে পারেন।
- শিক্ষার্থীদেরকে শাসকের শূন্য বিন্দু থেকে পরিমাপ করা শুরু করতে মনে করিয়ে দিন, এবং তারা যে বস্তুটি পরিমাপ করছে তার শেষ বিন্দুতে গভীর মনোযোগ দিন। তাদের পরিমাপ ভুলভাবে শুরু করা বা শেষ করা তাদের গণনা এবং তাদের রোবটের চূড়ান্ত চলাচলে প্রভাব ফেলবে ।
- নিশ্চিত করুন যে শিক্ষার্থীরা সঠিকভাবে পরিমাপ করার জন্য তারা যে শাসক ব্যবহার করছে তার চিহ্নগুলিকীভাবে পড়তে হয় তা জানে । আপনি যে শাসকদের ব্যবহার করছেন তাদের যদি ইম্পেরিয়াল এবং মেট্রিক উভয় ইউনিট থাকে ( যেমন VEX GO প্রিন্টেবল রুলার) তবে নিশ্চিত হয়ে নিন যে শিক্ষার্থীরা ধারাবাহিকভাবে একই পরিমাপের ইউনিট ব্যবহার করছে ।
- শিক্ষার্থীরা তাদের পরিমাপকে নিকটতম ইউনিট বা একটি ইউনিটের ভগ্নাংশে গোল করতে পারে । প্রয়োজন হলে রাউন্ডিং গণনা সহজতর করতে পারে; তবে পরিমাপকে কম সুনির্দিষ্টও করতে পারে । উদাহরণস্বরূপ, আপনি শিক্ষার্থীদের নিকটতম অর্ধ ইঞ্চি বা সেন্টিমিটার পর্যন্ত গোল করার নির্দেশ দিতে পারেন, তবে তাদের রোবট প্রাথমিকভাবে যা ধারণা করা হয়েছিল তার চেয়ে কিছুটা এগিয়ে যায় । বিকল্পভাবে, আপনার শিক্ষার্থীদের কাছে এক ইঞ্চি বা মিলিমিটারের নিকটতম পরিমাপ থাকতে পারে এবং দেখতে পাবেন যে তাদের রোবটগুলি নির্ধারিত দূরত্বের কাছাকাছি ভ্রমণ করে ।
- যদি ছাত্রদের পরিমাপের সাথে অতিরিক্ত অনুশীলনের প্রয়োজন হয়, আপনি অনুশীলনী পরিমাপ VEX GO অ্যাক্টিভিটি ব্যবহার করতে পারেন পৃথক ছাত্র বা গোষ্ঠীর সাথে, বা পুরো ক্লাসের কার্যকলাপ হিসাবে।
360° বাঁকানোর গণিত
ল্যাব 5-এ প্যারেড সম্পন্ন করতে, শিক্ষার্থীরা একটি প্যারেড রুটের সাথে তাদের কোড বেস ফ্লোট করবে ।
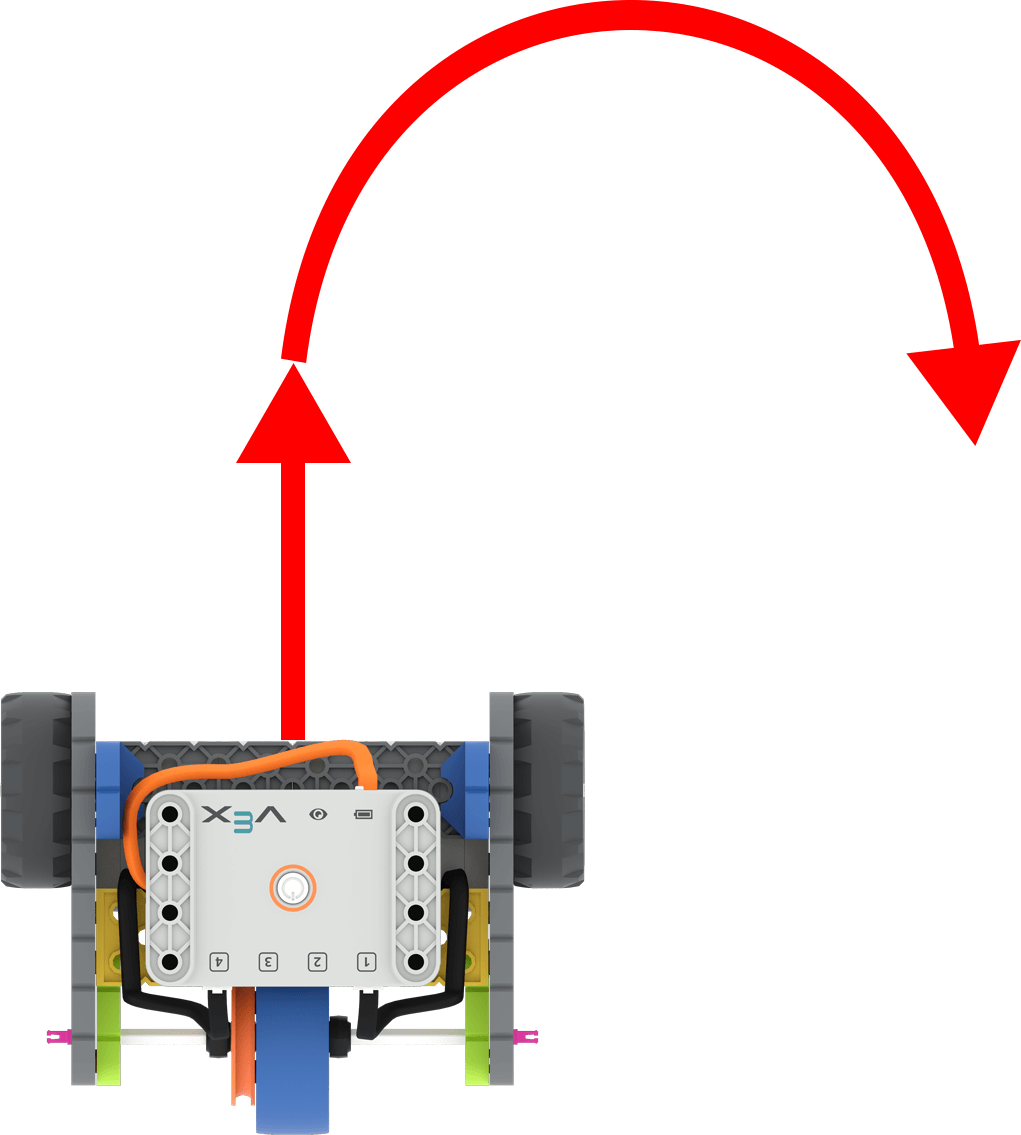
তীরচিহ্ন সহ কোড বেস যাতে সামনের দিকে গাড়ি চালানো দেখানো যায় এবং তারপর ডানদিকে বাঁকানো হয়
শিক্ষার্থীরা একটি সরলরেখা দূরত্বে ভ্রমণ করতে, একটি অ-রৈখিক দূরত্ব বা একটি পালা চালানোর জন্য রোবটটি কোড করার জন্য রোবটটি কোডিং সম্পর্কে যা শিখেছে তার উপর ভিত্তি করে তৈরি করবে । শিক্ষার্থীরা এখনও একটি নির্দিষ্ট দূরত্ব ভ্রমণ করার জন্য প্রয়োজনীয় টার্নের সংখ্যা গণনা করছে, তাই তারা আগের ল্যাবের মতো একই সূত্র ব্যবহার করবে ।
আপনার শিক্ষার্থীদের সাথে রোবটটির 360° ঘূর্ণন চালানোর জন্য প্রয়োজনীয় হুইল টার্নের সংখ্যা কীভাবে গণনা করা যায় সে সম্পর্কে জানতে নিচের ভিডিওটি দেখুন ।
সহায়ক তথ্যসূত্র:
কোড বেসটি চালু হলে, রোবটটি চালু করতে ড্রাইভিং হুইলগুলি বিপরীত দিকে চলে যায় । উদাহরণস্বরূপ, রোবটটিকে ডানদিকে ঘুরিয়ে দেওয়ার জন্য, বাম চাকাটি এগিয়ে যাবে, যখন ডান চাকাটি বিপরীত দিকে চলবে ।
কোড বেসের পরিভাষা এবং মান:
| পদ | সংজ্ঞা | ভিজ্যুয়াল | সূত্র | মূল্য |
|---|---|---|---|---|
| ব্যাসার্ধ | প্রতিটি চাকার কেন্দ্র থেকে একটি সরল রেখার পরিমাপ (হুইল বেস নামেও পরিচিত) |  |
d = 2 r | ~ 135 মিমি বা 5.3 ইঞ্চি |
| পরিধি | একটি 360° সম্পূর্ণ করার জন্য চাকার দ্বারা চালিত মোট দূরত্ব |  |
C = π d | ~ 424 মিমি বা 16.7 ইঞ্চি |
যে কোনও ডিগ্রি বাঁকানোর গণিত
রোবটকে যে কোনও ডিগ্রি ঘুরিয়ে দেওয়ার জন্য প্রয়োজনীয় হুইল টার্নের সংখ্যা গণনা সম্পর্কে আরও জানতে এই ভিডিওটি দেখুন ।
ডিগ্রিতে রূপান্তর
[স্পিন ফর] ব্লকটি প্যারামিটার হিসেবে টার্ন বা ডিগ্রি গ্রহণ করবে। ডিগ্রি ব্যবহার করতে, কেবল 360 দ্বারা টার্নের সংখ্যা গুণ করুন । এই উদাহরণটি দেখায় যে রোবটটিকে সম্পূর্ণ 360° ঘোরানোর জন্য মোটরগুলি কত ডিগ্রি ঘুরবে। লক্ষ্য করুন যে এই প্রকল্পে মোটরগুলি বিপরীত দিকে ঘুরছে, এবং 'এবং অপেক্ষা করো না' প্রথম ব্লকে যোগ করা হয়েছে, তাই মোটরগুলি একই সাথে ঘুরবে। এটি রোবটটিকে পছন্দসই 360° এর ডানদিকে ঘোরাবে । 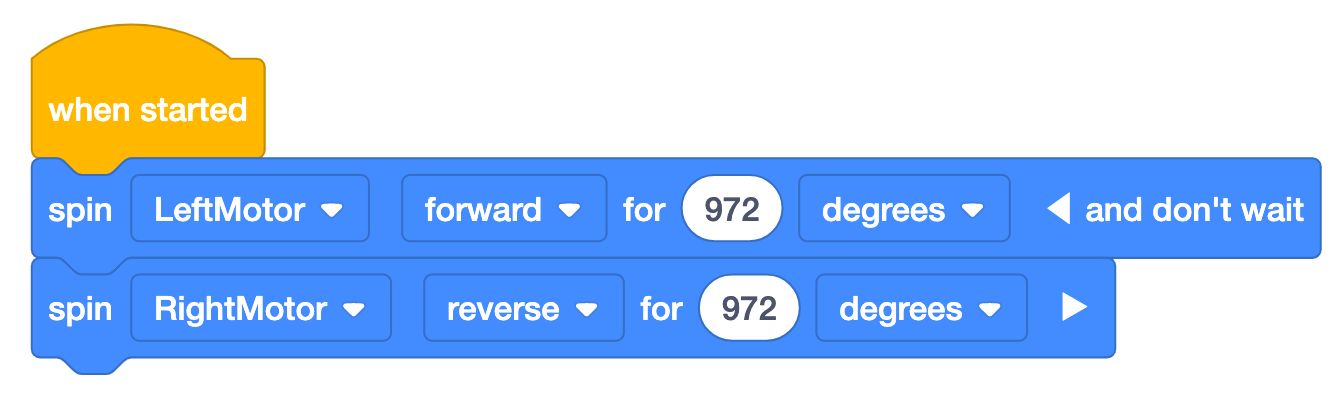
সাধারণ ভুল ধারণা
পরিমাপ এবং ড্রাইভিং এবং বাঁক গণিত সম্পর্কে শিক্ষার্থীদের বেশ কয়েকটি ভুল ধারণা থাকতে পারে । এগুলো হল সবচেয়ে সাধারণ কিছু, আপনার শিক্ষার্থীদের সাথে কীভাবে এগুলো মোকাবেলা করবেন তার পরামর্শ সহ।
| পরিস্থিতি | ভুল ধারণা | প্রস্তাবিত সংশোধন |
|---|---|---|
|
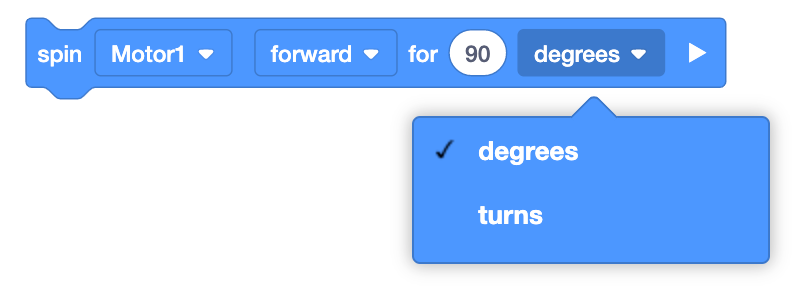
শিক্ষক ক্লাসকে জিজ্ঞাসা করেন, রোবটকে 90° ঘুরিয়ে দেওয়ার জন্য [Spin for] ব্লকে আমাদের কী ইনপুট করা উচিত? শিক্ষার্থী উত্তর দেয় "90" । |
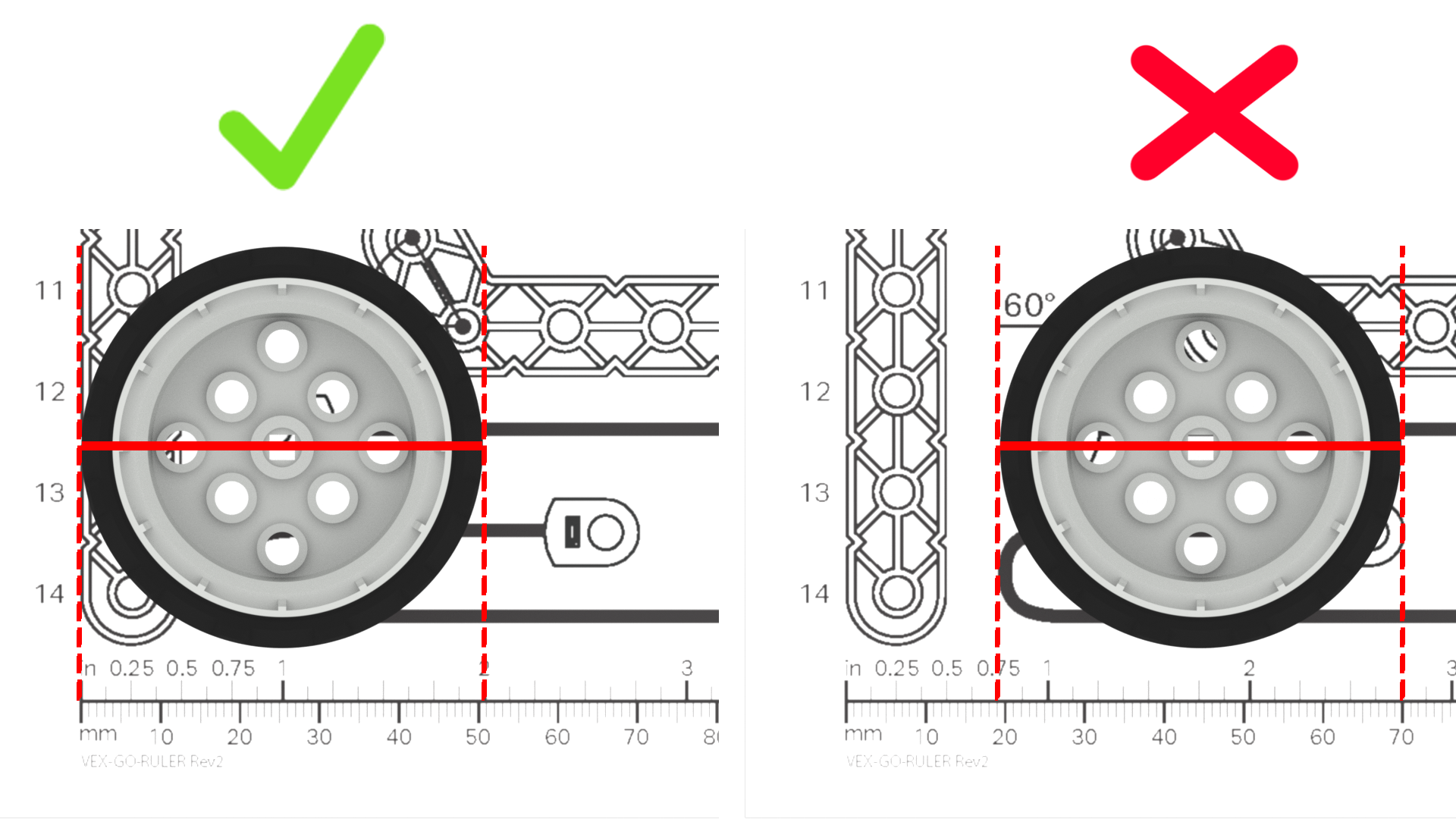
চাকাটি ঘুরে বেড়ানোর জন্য যে দূরত্বটি চালাচ্ছে তা টার্ন কোণের সমান । চাকাটি যে ডিগ্রীতে চালাতে হবে তা গণনা করতে শিক্ষার্থীরা রোবটের বাঁকানো পরিধি ব্যবহার করছে না । |
শিক্ষার্থীদের মনে করিয়ে দিন যে রোবটটি চালু হওয়ার জন্য চাকাগুলিকে বাঁকানো পরিধি বরাবর গাড়ি চালাতে হবে । (এই ছবিতে, এটি একটি হলুদ রেখা থেকে অন্যটিতে লাল বৃত্ত বরাবর ।)
শিক্ষার্থীদের একটি নির্দিষ্ট দূরত্ব ভ্রমণ করতে চাকাটি কতদূর ঘুরবে তা কল্পনা করতে সহায়তা করার জন্য চাকাটি নিজেই 90° ঘুরিয়ে দিন । |
|
শিক্ষক ক্লাসকে জিজ্ঞাসা করেন, রোবটকে 12 ইঞ্চি এগিয়ে নিয়ে যাওয়ার জন্য [Spin for] ব্লকে আমাদের কী ইনপুট দেওয়া উচিত? শিক্ষার্থী উত্তর দেয় "12" । |
হুইল টার্নের সংখ্যা ড্রাইভের কাঙ্ক্ষিত দূরত্বের সমান । শিক্ষার্থী কাঙ্ক্ষিত দূরত্ব চালানোর জন্য হুইল টার্নের সংখ্যা গণনা করতে চাকা পরিধি ব্যবহার করছে না । |
শিক্ষার্থীদের মনে করিয়ে দিন যে রোবটটি 1 চাকা বাঁক নিয়ে কতদূর এগিয়েছে, এবং জিজ্ঞাসা করুন 12 ইঞ্চি চালানোর জন্য 12 টি খুব বেশি বা খুব কম সম্পূর্ণ বাঁক মনে হচ্ছে কিনা । শিক্ষার্থীদের এটি আরও ভালভাবে কল্পনা করতে সহায়তা করার জন্য, 12 চাকার বাঁকগুলির জন্য একটি শাসকের সাথে একটি চাকা রোল করুন, যাতে শিক্ষার্থীরা দেখায় যে দূরত্বটি কত দূরে ।
শিক্ষার্থীদের মনে করিয়ে দিন যে 1 চাকার বাঁক হল চাকা পরিধি, এবং 12 ইঞ্চি অবশ্যই সেই পরিধি দ্বারা ভাগ করতে হবে । |
| শিক্ষার্থী চাকাটি পরিমাপ করছে, তবে চাকার কোনও প্রান্তই শাসকের শূন্য চিহ্নের উপরে নেই । |
শাসক 1 থেকে শুরু হয়, শূন্য থেকে নয় । সঠিক পরিমাপ পেতে শিক্ষার্থী সঠিকভাবে শাসককে ব্যবহার করছে না । |
শিক্ষার্থীদের মনে করিয়ে দিন যে শাসক ‘0‘ চিহ্ন থেকে শুরু হয় এবং যদি তারা সেই বিন্দু থেকে পরিমাপ না করে তবে তাদের পরিমাপ ভুল হবে । আপনি টেপ বা একটি রঙিন মার্কার দিয়ে শাসকের শুরু চিহ্নিত করতে পারেন, শিক্ষার্থীদের কাজ করার সময় অতিরিক্ত চাক্ষুষ সহায়তা হিসাবে । (পরিমাপের সাথে অতিরিক্ত অনুশীলনের জন্য, শিক্ষার্থীরা অনুশীলন পরিমাপের ক্রিয়াকলাপটি সম্পূর্ণ করতে পারে।) |
|
একজন শিক্ষার্থী বলেছেন যে তাদের প্রকল্পটি কাজ করছে না । শিক্ষক লক্ষ্য করেছেন যে [Spin for] ব্লকে হুইল টার্নের সঠিক সংখ্যা রয়েছে, তবে প্যারামিটারটি ‘ডিগ্রি‘ তে সেট করা আছে । |
ইউনিট বা প্যারামিটারগুলি বিনিময়যোগ্য । শিক্ষার্থীরা তাদের প্রকল্পের পরিমাপের প্যারামিটার/ইউনিটগুলিতে অংশ নিচ্ছে না । |
শিক্ষার্থীদের জিজ্ঞাসা করুন তারা কোন পরিমাপের একক ব্যবহার করছে এবং এটি ব্লকের প্যারামিটারের সাথে মেলে কিনা ।
|
| একজন শিক্ষার্থী [Spin for] ব্লকের প্যারামিটারে ’21/4' প্রবেশ করার চেষ্টা করে, "2 টি পালা" লিখতে । |
ভগ্নাংশ এবং দশমিক একই ভাবে লেখা হয় । শিক্ষার্থী ভগ্নাংশকে দশমিক রূপে রূপান্তর করছে না । |
শিক্ষার্থীদের মনে করিয়ে দিন যে তাদের শনাক্তযোগ্য প্যারামিটার হওয়ার জন্য ভগ্নাংশকে দশমিকে রূপান্তর করতে হবে । এটি করার জন্য, লবকে হর দিয়ে ভাগ করুন। 2 ¼=94 =2.25 আপনি শিক্ষার্থীদের নিজস্ব সম্পদ তৈরি করার জন্য প্রায়শই ব্যবহৃত ভগ্নাংশের মান এবং তাদের দশমিক সমতুল্য চার্ট ব্যবহার করতে চাইতে পারেন। |
|
শিক্ষক শিক্ষার্থীদের তাদের চাকা পরিধি গণনা ভাগ করে নিতে বলেন । শিক্ষার্থীর উত্তর |
ব্যাসার্ধ - πx ব্যাসার্ধ ব্যবহার করে পরিধি গণনাকরাহয়। শিক্ষার্থী গণনায় ভুল পরিমাপ ব্যবহার করছে । |
শিক্ষার্থীদের মনে করিয়ে দিন যে পরিধি হলπ x ব্যাস; এবং ব্যাস হল চাকার কেন্দ্র জুড়ে একটি সরল রেখা (অথবা ব্যাসার্ধের দ্বিগুণ)।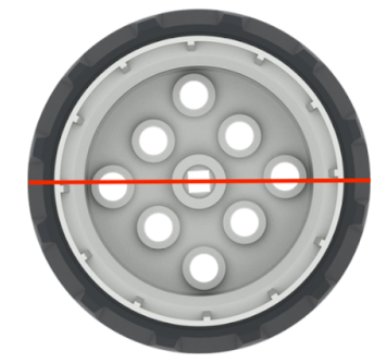 যদি অনেক শিক্ষার্থী সূত্রগুলি ব্যবহার করতে অসুবিধা বোধ করে তবে আপনি পুরো ক্লাস অ্যাক্টিভিটি হিসাবে মান পরিমাপ এবং গণনা করতে চাইতে পারেন। |


 শিক্ষার্থীদের মনে করিয়ে দিন যে প্যারামিটারটি সঠিক ইউনিটে সেট করা থাকলেই তাদের গণনা উদ্দেশ্য অনুযায়ী কাজ করবে । বাঁক এবং ডিগ্রি একই মান নয় ।
শিক্ষার্থীদের মনে করিয়ে দিন যে প্যারামিটারটি সঠিক ইউনিটে সেট করা থাকলেই তাদের গণনা উদ্দেশ্য অনুযায়ী কাজ করবে । বাঁক এবং ডিগ্রি একই মান নয় ।
উদাহরণ সমাধান
ল্যাব ৪ উদাহরণ সমাধান
*বিঃদ্রঃ: উদাহরণ প্রকল্পের প্রথম ব্লকের সাথে 'এবং অপেক্ষা করো না' ব্যবহার করা হয়েছে যাতে উভয় ব্লক একই সাথে কার্যকর হয়। ‘এবং অপেক্ষা করবেন না’ ছাড়া, প্রথম মোটরটি ঘুরবে, তারপর দ্বিতীয়টি, এবং কোড বেসটি ইচ্ছাকৃতভাবে চলবে না । নিশ্চিত করুন যে শিক্ষার্থীরা 'এবং অপেক্ষা করবেন না' বা তাদের প্রকল্পটি পরিকল্পনা অনুযায়ী চলবে না ।

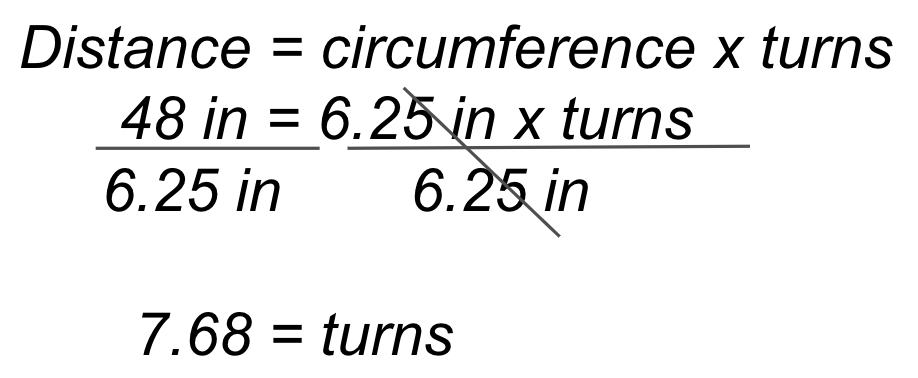
প্যারেড রুটের 48 ইঞ্চি (~122 সেমি) দৈর্ঘ্য চালানোর জন্য, কোড বেসটি ভ্রমণ করতে হবে ~7.68 টার্ন। বাম দিকে গণনাটি দেখানো হয়েছে, এবং ডানদিকে VEXcode GO সমাধানের উদাহরণ।

ল্যাব ৫ উদাহরণ সমাধান
প্যারেড রুটের 48 ইঞ্চি (~122 সেমি) দৈর্ঘ্য চালানোর জন্য এবং 180 ডিগ্রি ঘুরানোর জন্য, কোড বেসকে ~7.68 টার্নের জন্য এগিয়ে যেতে হবে, তারপরে একটি মোটরকে এগিয়ে নিয়ে যেতে হবে এবং অন্যটি ~ 1.47 টার্নের জন্য বিপরীত দিকে ঘোরাতে হবে। গণনাটি ডানদিকে VEXcode GO সমাধানের উদাহরণ সহ দেখানো হয়েছে ।
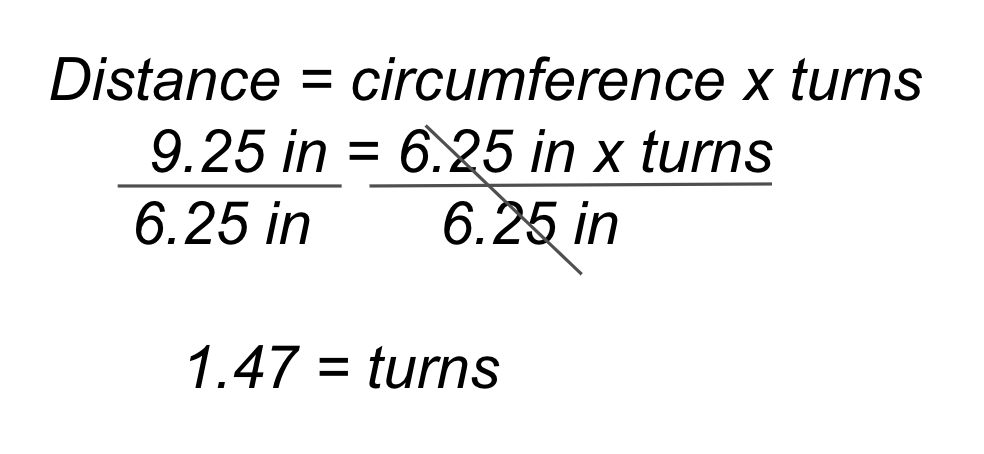

দ্রষ্টব্য: বাঁকের পরিবর্তে ডিগ্রি ব্যবহার করতে, বাঁকের গণনাগুলিকে 360 দিয়ে গুণ করুন।
এক্সটেনশন প্যারেড রুট
শিক্ষার্থীদের যদি অতিরিক্ত চ্যালেঞ্জের প্রয়োজন হয়, তাহলে আপনি বিভিন্ন উপায়ে প্যারেড রুট প্রসারিত করতে পারেন । এটি একটি উদাহরণ, সম্ভাব্য সমাধান সহ ।
 একটি সম্ভাব্য প্যারেড রুট এক্সটেনশনের
একটি সম্ভাব্য প্যারেড রুট এক্সটেনশনের এই উদাহরণ রুটে, ড্রাইভিং দূরত্ব এবং বাঁক ল্যাবগুলি থেকে অর্ধেক হয়ে যায় । তবে এই রুটে, টার্নের দিকটি গুরুত্বপূর্ণ । পুনঃগণনা করার পাশাপাশি, শিক্ষার্থীদের চাকাগুলিকে কাঙ্ক্ষিত দিকে ঘোরানোর জন্য দিকনির্দেশনাগুলি বের করতে হবে।
পূর্ববর্তী ল্যাবগুলি থেকে অর্ধেক করা গণনাগুলি নিম্নরূপ:
ড্রাইভিং দূরত্ব = ~ ৩.৮৪ বাঁক
বাঁক দূরত্ব = ~ ০.৭৩ বাঁক
এই মানগুলি নিম্নলিখিত উদাহরণে ব্যবহার করা হয় VEXcode GO সমাধান:
