
수학 지원
4, 5번째 랩을 가르칠 때는 추가적인 수학 개념과 계산이 포함됩니다. 이 페이지는 학생들이 실험실에서 탐구하는 수학을 뒷받침하는 관련 배경 자료를 교사들에게 제공합니다.
운전 수학
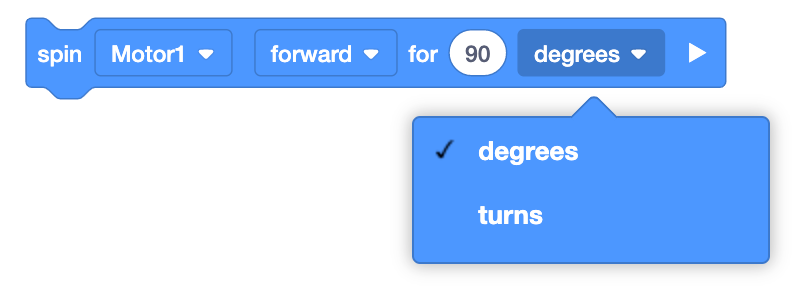
랩 4에서 퍼레이드를 완료하기 위해 학생들은 직선 퍼레이드 경로를 따라 코드 베이스 수레를 운전합니다. 두 바퀴를 동시에 움직이는 구동계 블록을 사용하는 대신, 학생들은 여기에 표시된 것처럼 VEXcode GO의 [회전] 블록을 사용하여 바퀴에 연결된 모터를 회전시키고 로봇을 앞으로 움직입니다. [스핀 포] 블록은 매개변수로 '회전' 또는 '도'를 허용합니다. 4번째 실험에서 학생들은 퍼레이드 경로의 거리를 로봇으로 주행하기 위해 프로젝트에 입력해야 할 회전 수를 계산합니다.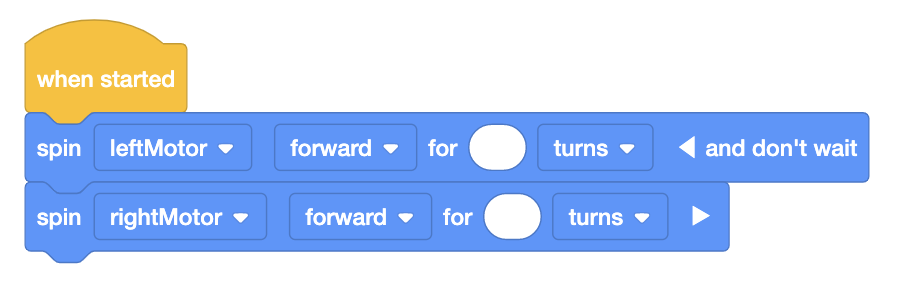
로봇을 일정 거리만큼 직선 주행시키는 데 필요한 바퀴 회전 수를 계산하는 방법을 알아보려면 아래 영상을 시청하세요.
유용한 참고자료:
회색 바퀴에 대한 용어 및 가치:
| 용어 | 정의 | 시각적 | 공식 | 값 |
|---|---|---|---|---|
| 지름 | 원의 중심을 가로지르는 직선 측정 | 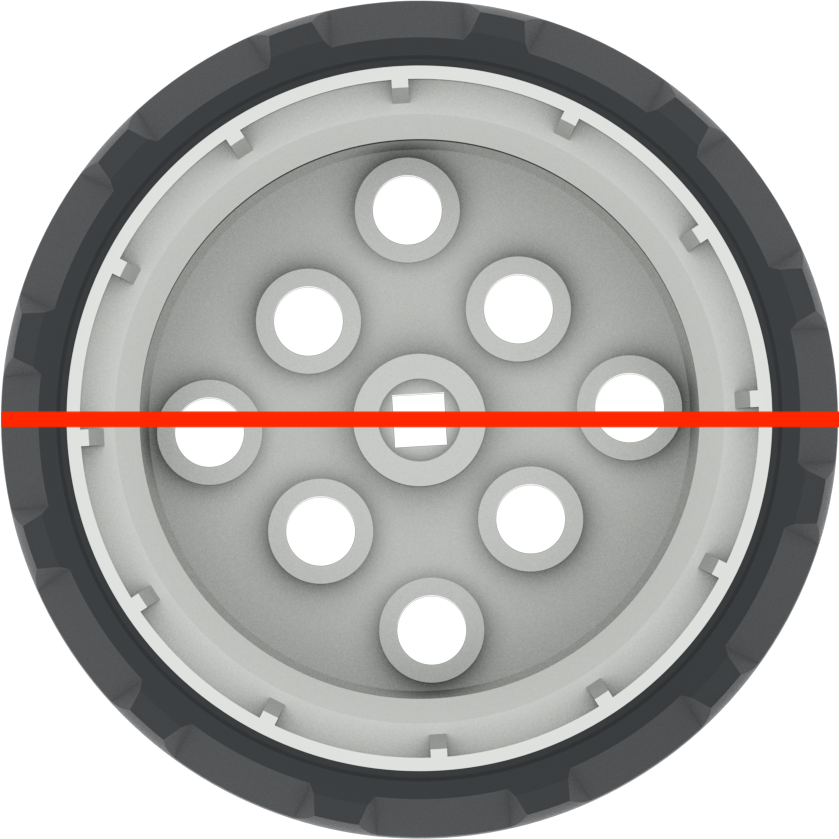 |
d = 2 r | ~ 50.93 mm 또는 2인치 |
| 둘레 | 원의 바깥쪽 주위의 총 거리 |  |
C = π d | ~ 160mm 또는 6.25 인치 |
정확한 측정
학생들이 측정할 때, 신중하고 정확하게 측정하도록 지도해야 한다. 학생들이 측정하는 데 VEX GO 인쇄용 눈금자하거나 교실용 눈금자를 사용할 수 있습니다.
- 학생들에게 눈금자의 영점부터 측정을 시작하도록 상기시키고, 측정하는 물체의 끝점에 주의를 기울인다. 측정을 부정확하게 시작하거나 종료하면 계산과 로봇의 최종 움직임에 영향을 미칩니다.
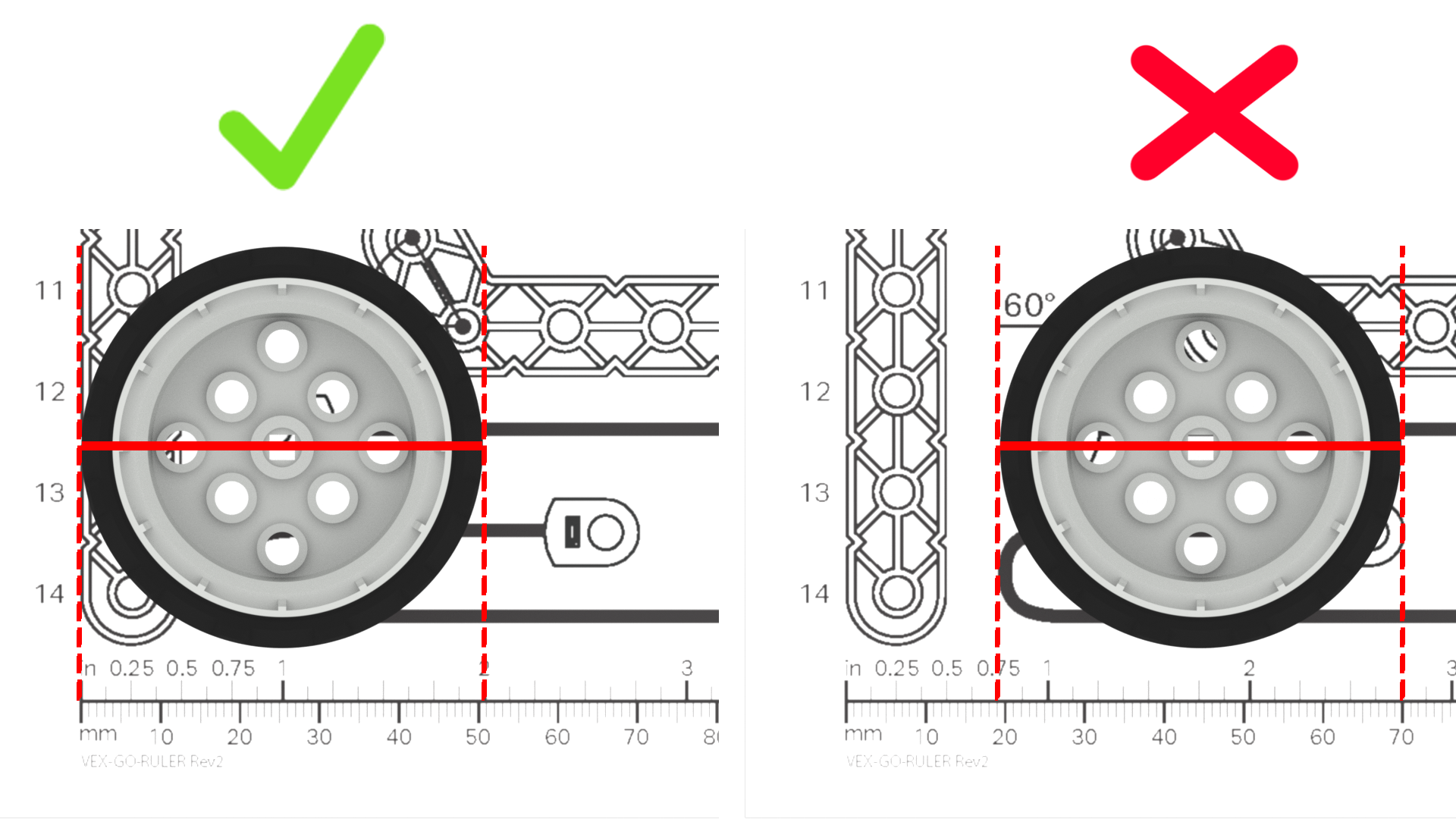
- 정확하게 측정하기 위해 학생들이 사용하고 있는 자의 자국을 읽는 방법을알고 있는지 확인한다. 사용 중인 자에 제국 및 미터법 단위 (예: VEX GO Printable Ruler) 가 모두 있는 경우 학생들이 동일한 측정 단위를 일관되게 사용하고 있는지 확인하십시오.
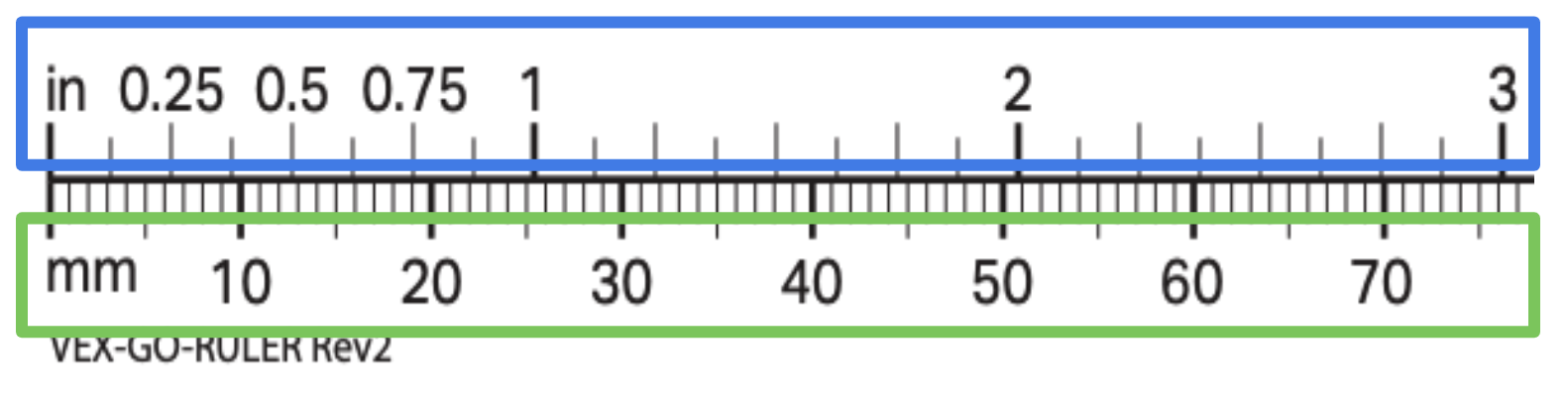
- 학생들은 측정값을 가장 가까운 단위 또는 단위의 일부로 반올림할 수 있습니다. 반올림은 필요한 경우 계산을 더 간단하게 만들 수 있지만 측정값을 덜 정확하게 만들 수도 있습니다. 예를 들어, 학생들에게 가장 가까운 반 인치 또는 센티미터로 반올림하도록 지시할 수 있지만, 로봇은 처음 의도한 것보다 약간 더 멀리 움직입니다. 또는 학생들에게 1인치 또는 밀리미터 단위로 측정하여 로봇이 의도한 거리에 더 가깝게 이동하는 것을 발견하게 할 수도 있다.
- 학생들이 측정에 대한 추가 연습이 필요할 경우, 개별 학생이나 그룹과 함께 연습 측정 VEX GO 활동 사용하거나 전체 학급 활동으로 사용할 수 있습니다.
360° 회전 수학
실험실 5에서 퍼레이드를 완료하기 위해 학생들은 퍼레이드 경로를 따라 코드 베이스를 한 바퀴 돌게 됩니다.
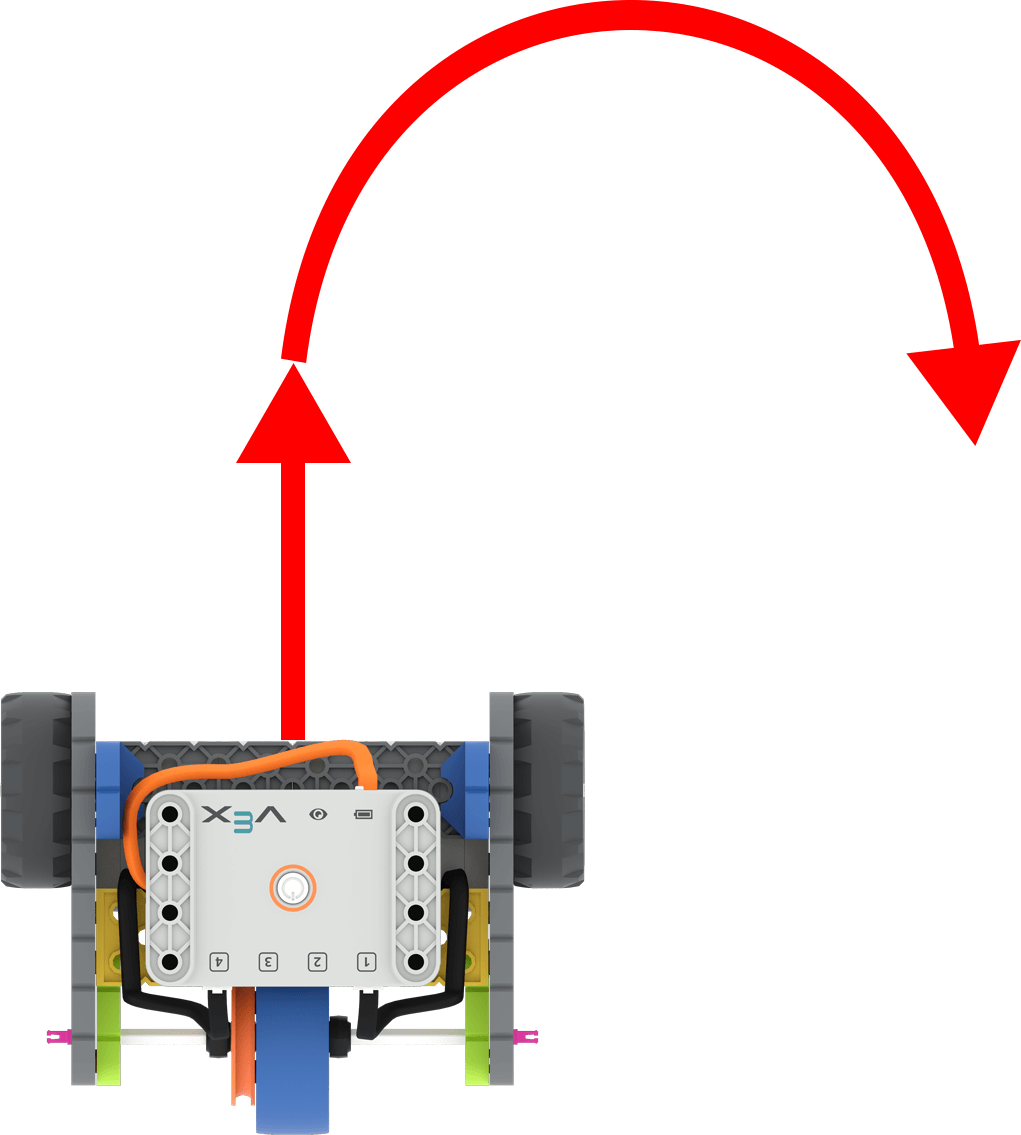
화살표가 있는 코드 베이스는 앞으로 주행한 다음 우회전을 표시합니다
학생들은 로봇을 코딩하여 직선 거리로 이동하거나, 로봇을 코딩하여 비선형 거리 또는 회전 거리를 주행하는 방법에 대해 배운 내용을 토대로 학습합니다. 학생들은 여전히 설정된 거리를 이동하는 데 필요한 회전 수를 계산하고 있으므로 이전 실험실과 동일한 공식을 사용합니다.
아래 동영상을 통해 학생들과 함께 로봇을 360° 회전하는 데 필요한 휠 회전 수를 계산하는 방법을 알아보세요.
유용한 참고자료:
코드 베이스가 회전하면 구동 휠이 반대 방향으로 움직여 로봇을 회전시킵니다. 예를 들어, 로봇을 오른쪽으로 돌리려면 왼쪽 바퀴가 앞으로 구동되고 오른쪽 바퀴는 반대로 구동됩니다.
코드 베이스에 대한 용어 및 가치:
| 용어 | 정의 | 시각적 | 공식 | 값 |
|---|---|---|---|---|
| 지름 | 각 휠의 중앙에서 직선 측정 (휠베이스라고도 함) |  |
d = 2 r | ~ 135mm 또는 5.3인치 |
| 둘레 | 360° 를 완성하기 위해 바퀴에 의해 구동되는 총 거리 |  |
C = π d | ~ 424mm 또는 16.7인치 |
어느 정도 선회하는 수학
로봇이 어느 정도 회전하는 데 필요한 휠 회전 수를 계산하는 방법에 대해 자세히 알아보려면 이 동영상을 시청하세요.
도로 변환
[회전] 블록은 회전이나 도로를 매개변수로 허용합니다. 도를 사용하려면 회전 수에 360을 곱하면 됩니다. 이 예는 로봇을° 회전시키기 위해 모터가 몇 도 회전해야 하는지 보여줍니다. 이 프로젝트에서는 모터가 반대 방향으로 회전하고, 첫 번째 블록에 '기다리지 마세요'가 추가되어 모터가 동시에 회전합니다. 그러면 로봇이 원하는 360° 로 오른쪽으로 회전합니다. 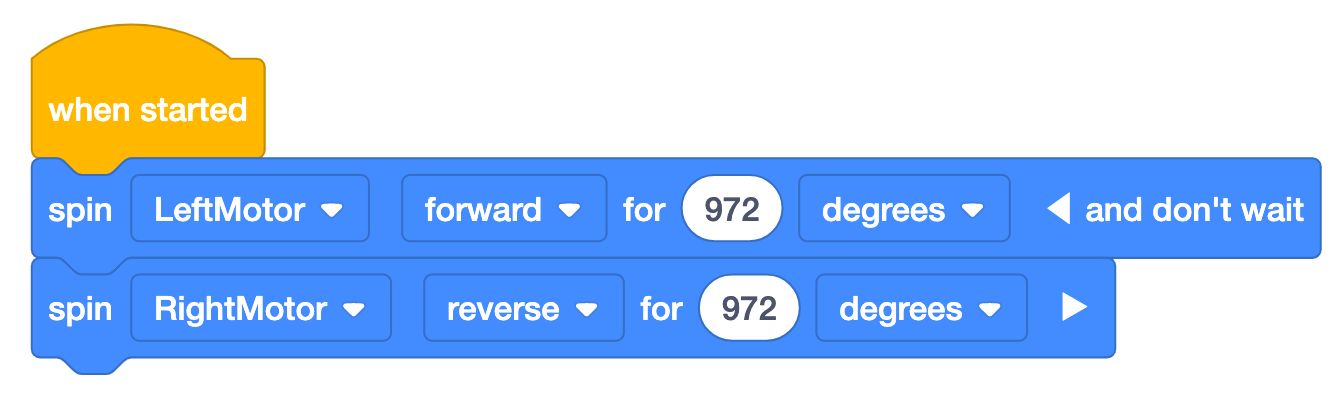
일반적인 오해
학생들이 운전과 회전의 측정과 수학에 대해 가질 수 있는 몇 가지 오해가 있습니다. 다음은 가장 흔한 질문 중 일부이며, 학생들에게 이러한 질문을 다루는 방법에 대한 제안도 포함되어 있습니다.
| 상황 | 오해 | 제안된 수정 사항 |
|---|---|---|
|
교사가 반원들에게 로봇이 90° 회전하도록 하려면 [Spin for] 블록에 무엇을 입력해야 합니까? 라고 묻습니다. 학생은 “90” 이라고 답한다. |
휠이 회전하기 위해 주행하는 각도의 거리는 회전 각도와 같습니다. 학생들은 로봇의 회전 둘레를 사용하여 휠이 운전해야 하는 거리 (도) 를 계산하지 않습니다. |
로봇이 회전하려면 바퀴가 회전 둘레를 따라 움직여야 함을 학생들에게 상기시킨다. (이 이미지에서는 한 노란색 선에서 다른 선으로 빨간색 원을 따라 표시됩니다.)
휠 자체를 90° 로 돌리면 학생들이 휠이 얼마나 멀리 회전하여 주어진 거리를 이동하는지 시각화할 수 있습니다. |
|
교사는 로봇을 12인치 앞으로 구동하기 위해 [Spin for] 블록에 무엇을 입력해야 할까요? 라고 반원들에게 묻습니다. 학생은 “12” 라고 답한다. |
휠 회전 수는 원하는 구동 거리와 같습니다. 학생이 휠 둘레를 사용하여 원하는 거리를 주행하기 위해 휠 회전 수를 계산하지 않습니다. |
학생들에게 1바퀴 회전으로 로봇이 얼마나 멀리 움직이는지 상기시키고, 12인치 주행을 하기에는 12바퀴가 너무 많거나 너무 적게 느껴지는지 물어보세요. 학생들이 이를 더 잘 시각화할 수 있도록 자를 따라 바퀴를 굴려 바퀴를 12바퀴 돌리면 그 거리가 얼마나 되는지 학생들에게 보여줄 수 있다.
학생들에게 1바퀴 회전은 바퀴 둘레이며, 12인치를 그 둘레로 나눠야 함을 상기시킵니다. |
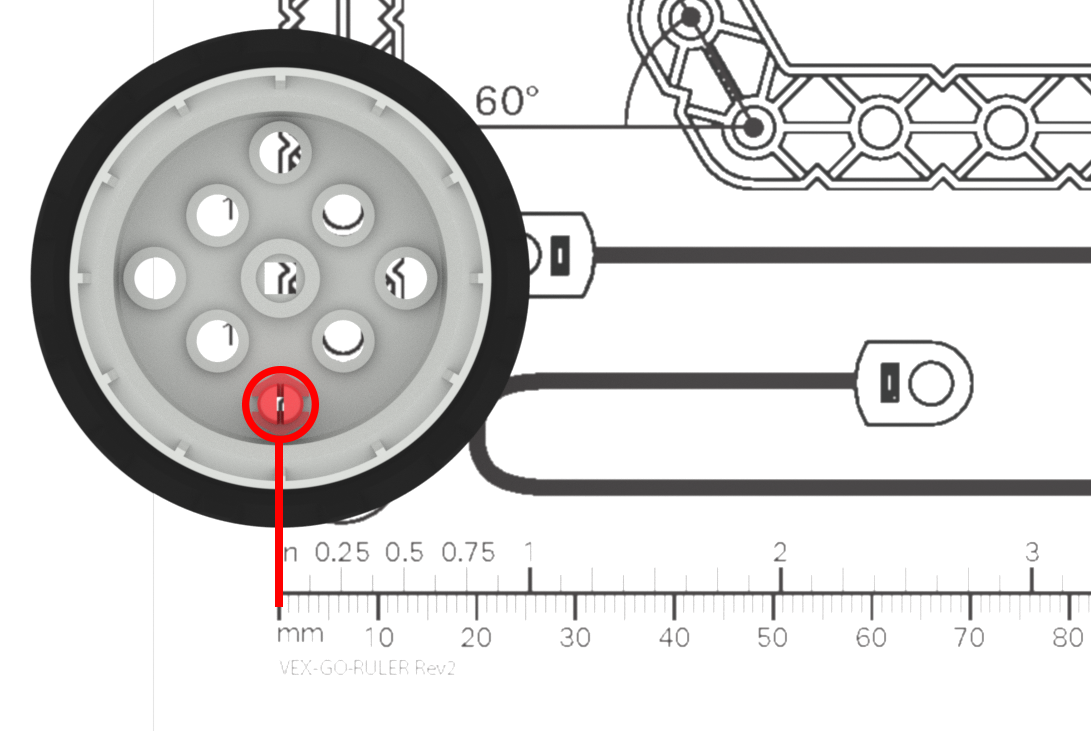
| 학생이 휠을 측정하고 있지만 휠의 가장자리가 눈금자의 영점 위에 있지 않습니다. |
눈금자는 0이 아니라 1에서 시작합니다. 학생이 정확한 측정을 위해 눈금자를 올바르게 사용하지 않습니다. |
학생들에게 눈금자는 ‘0‘ 표시에서 시작하며, 그 시점부터 측정하지 않으면 측정이 잘못될 것임을 상기시킨다. 자의 시작 부분을 테이프 또는 색 표시로 표시하여 학생들이 작업할 때 시각적 도움을 줄 수 있다. (측정에 대한 추가 연습을 위해 학생들은 측정 활동 연습을 완료할 수 있습니다.) |
|
한 학생이 자신의 프로젝트가 작동하지 않는다고 말합니다. 교사는 올바른 휠 회전 수가 [Spin for] 블록에 있지만 매개 변수는 ‘도‘ 로 설정되어 있음을 알 수 있습니다. |
단위 또는 매개 변수는 상호 교환할 수 있습니다. 학생들은 프로젝트의 매개 변수/측정 단위에 참석하지 않습니다. |
학생들에게 어떤 측정 단위를 사용하고 있는지, 블록의 매개변수와 일치하는지 물어본다.
|
| 학생이 [Spin for] 블록의 매개 변수에 ‘21/4’ 를 입력하여 “2 ¼ 턴” 을 입력하려고 합니다. |
분수와 소수는 같은 방식으로 작성됩니다. 학생은 분수를 소수로 변환하지 않습니다. |
분수를 인식할 수 있는 매개변수가 되려면 분수를 소수로 변환해야 한다는 점을 학생들에게 상기시킨다. 이렇게 하려면 분자를 분모로 나누세요. 2 ¼=94 =2.25 학생들이 자주 사용되는 분수 값과 그에 해당하는 소수 값을 차트로 표시하여 자신만의 자료를 만들도록 할 수도 있습니다. |
|
교사는 학생들에게 휠 둘레 계산을 공유하도록 요청합니다. 학생 답변 |
원주는 반지름 -πx반지름을 사용하여 계산됩니다. 학생이 계산에서 잘못된 측정을 사용하고 있습니다. |
학생들에게 원주는x 지름이고, 지름은 바퀴의 중심을 가로지르는 직선(또는 반지름의 두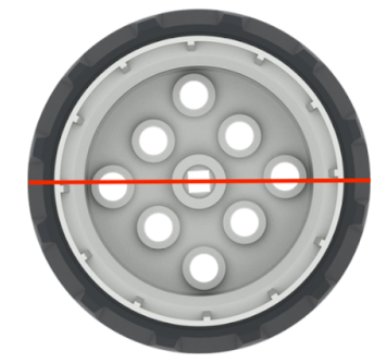 이라는 것을 시켜 주세요. 많은 학생들이 공식을 사용하는 데 어려움을 겪는다면 전체 학급 활동으로 값을 측정하고 계산하는 것이 좋습니다. |

 학생들에게 매개변수가 올바른 단위로 설정된 경우에만 계산이 의도한 대로 작동한다는 것을 상기시킨다. 회전과 도는 동일한 값이 아닙니다.
학생들에게 매개변수가 올바른 단위로 설정된 경우에만 계산이 의도한 대로 작동한다는 것을 상기시킨다. 회전과 도는 동일한 값이 아닙니다.
솔루션 예시
랩 4 예제 솔루션
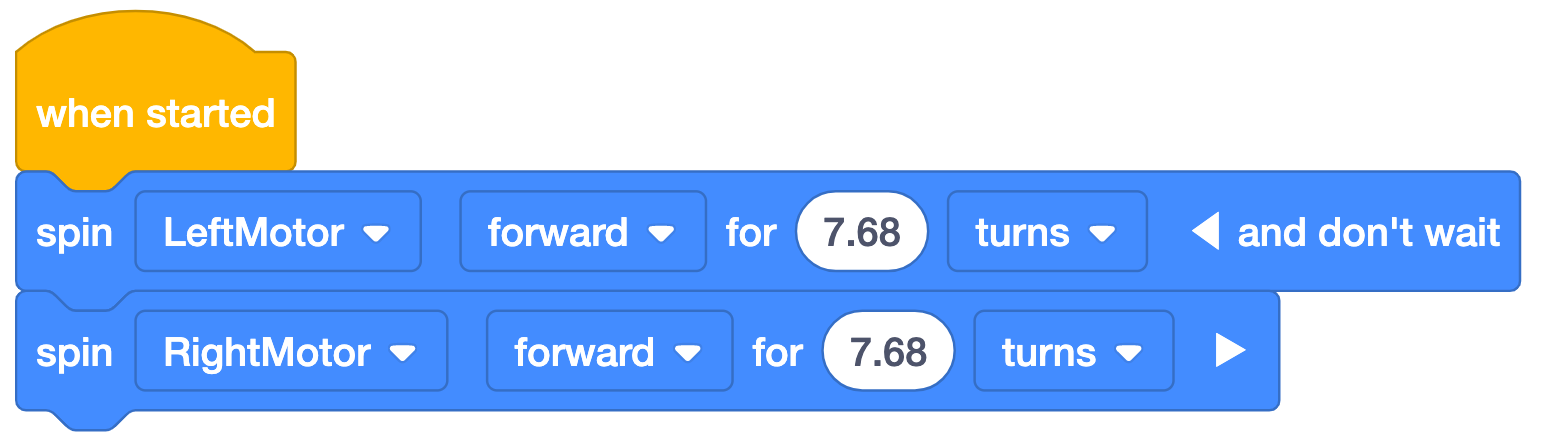
*참고: '그리고 기다리지 마세요'는 예제 프로젝트의 첫 번째 블록과 함께 사용되어 두 블록이 동시에 실행되도록 합니다. ‘그리고 기다리지 마세요’ 가 없으면 첫 번째 모터가 회전하고 두 번째 모터가 회전하며 코드 베이스가 의도한 대로 작동하지 않습니다. 학생들이 '그리고 기다리지 마십시오' 를 축소하지 않으면 프로젝트가 의도대로 실행되지 않습니다.

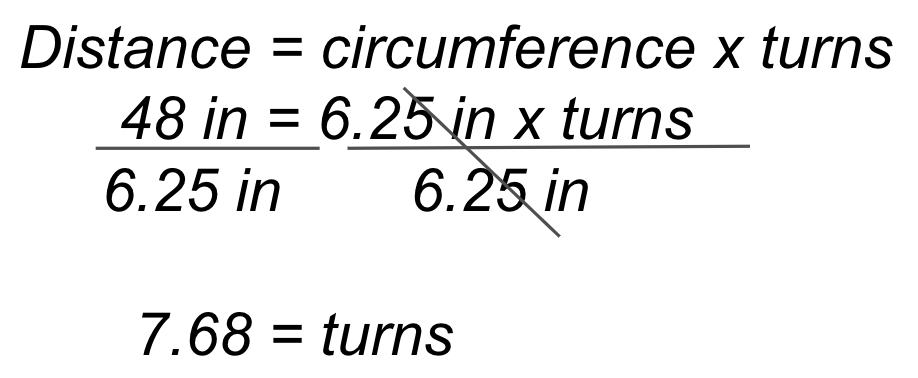
퍼레이드 경로의 48인치 (~ 122cm) 길이를 주행하려면 코드 베이스가 최대 7.68 턴을 주행해야 합니다. 왼쪽에는 계산 결과가 표시되어 있고, 오른쪽에는 VEXcode GO 솔루션 예시가 표시되어 있습니다.
랩 5 예제 솔루션
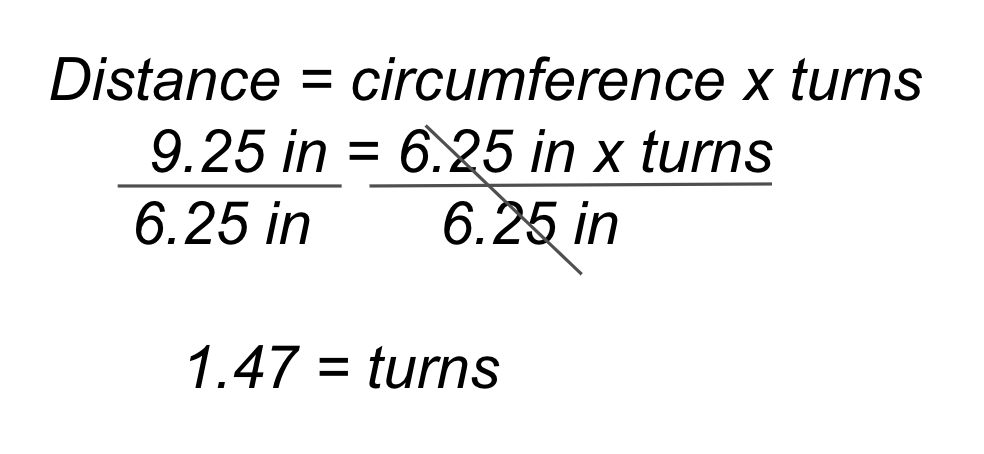
퍼레이드 경로의 48인치 (~ 122cm) 길이를 구동하고 180도 회전하려면 코드 베이스가 ~ 7.68 턴 동안 앞으로 이동한 다음 한 모터는 앞으로 돌리고 다른 모터는 ~ 1.47 턴 동안 역회전해야 합니다. 계산은 오른쪽의 예제 VEXcode GO 솔루션과 함께 표시됩니다.
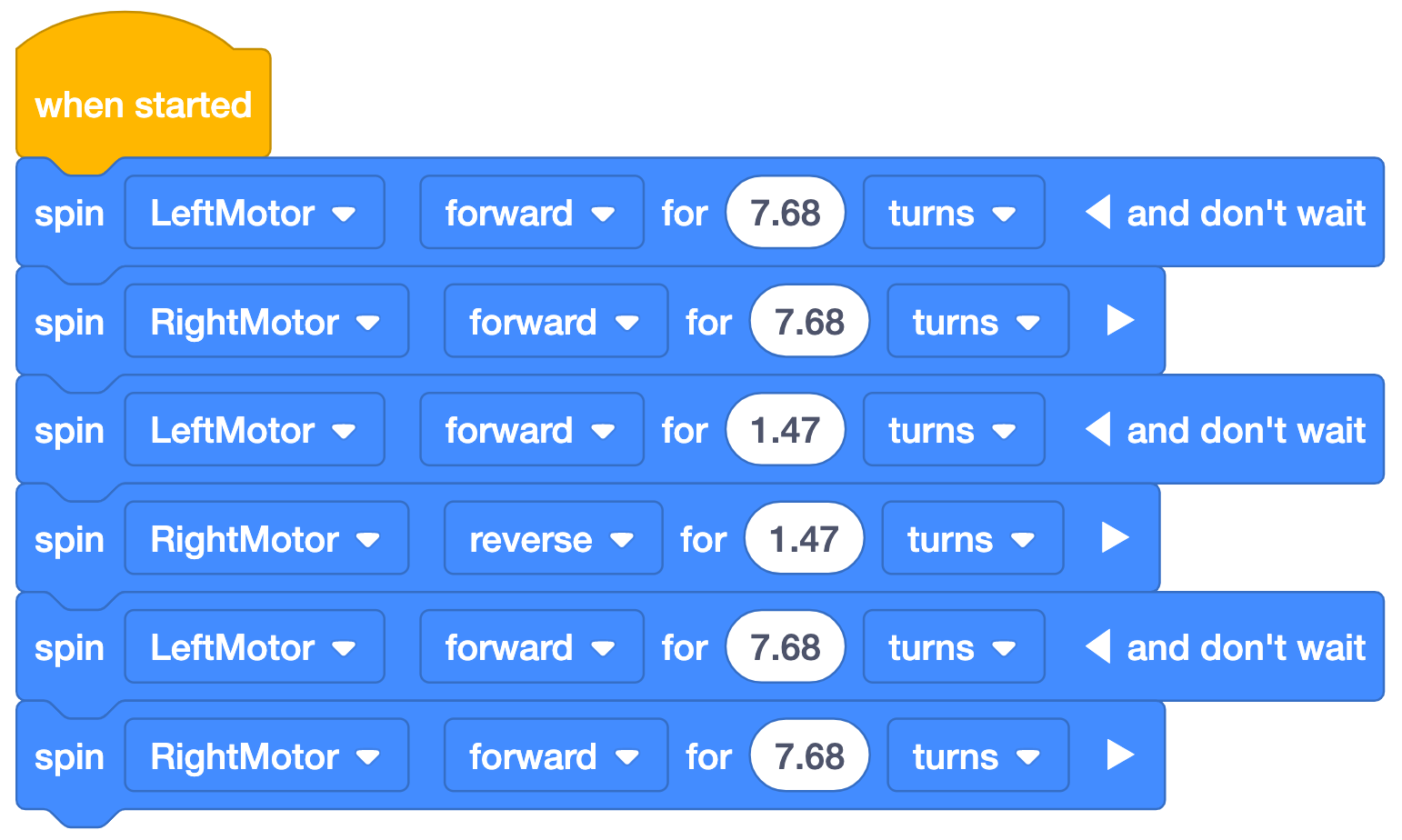
참고: 회전 대신 각도를 사용하려면 회전 계산에 360을 곱하세요.
익스텐션 퍼레이드 루트
학생들이 추가적인 도전이 필요한 경우, 다양한 방법으로 퍼레이드 경로를 확장할 수 있다. 이것은 가능한 해결책이 있는 한 가지 예입니다.
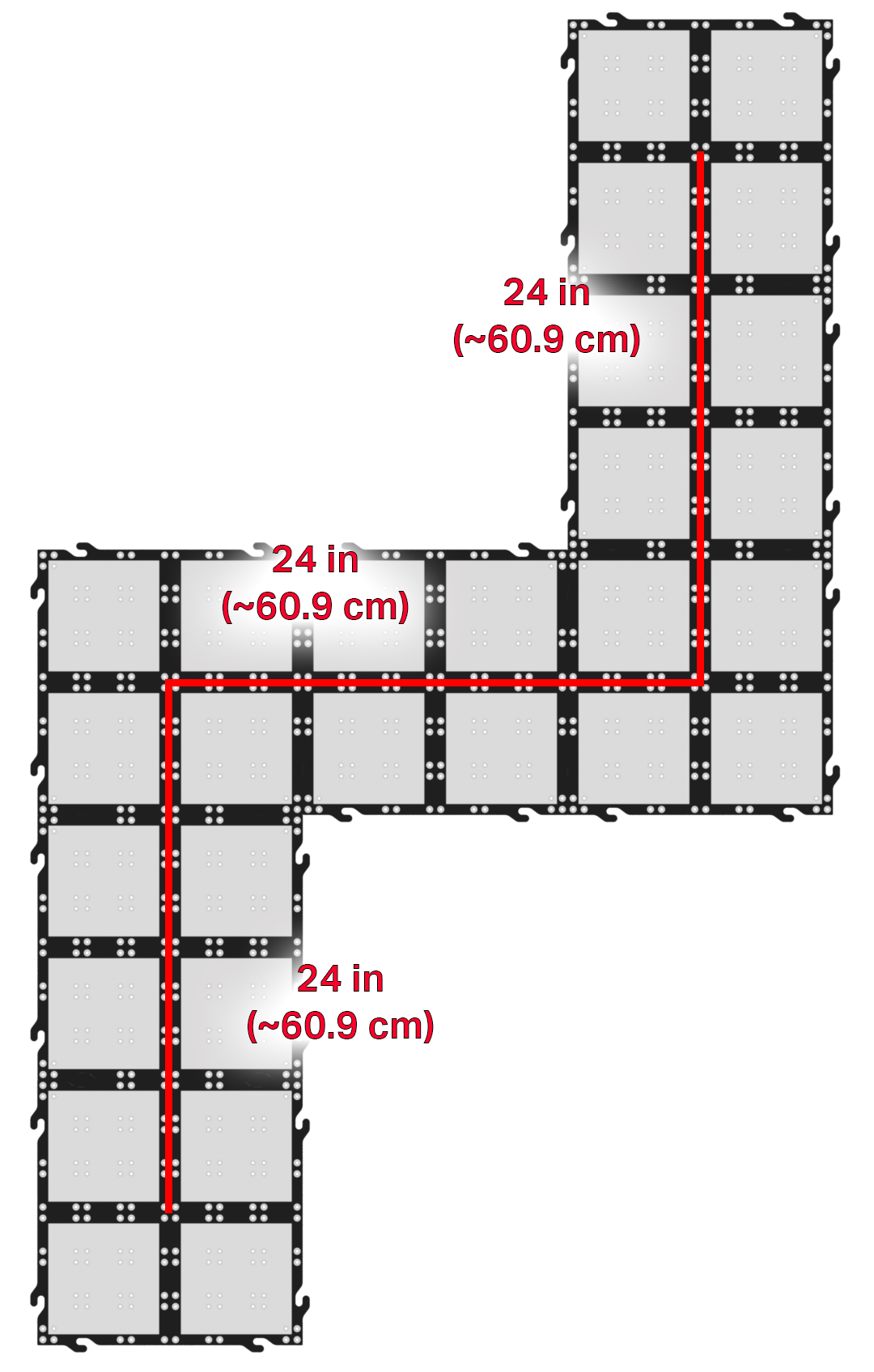 퍼레이드 노선 연장 가능성
퍼레이드 노선 연장 가능성 이 예제 경로에서는 실험실에서 주행 거리와 회전이 절반으로 줄어듭니다. 그러나 이 경로에서는 회전 방향이 중요합니다. 학생들은 다시 계산하는 것 외에도 바퀴를 원하는 방향으로 돌리는 방향을 알아내야 합니다.
이전 연구실에서 절반으로 줄어든 계산은 다음과 같습니다.
주행거리 = ~ 3.84회전
회전거리 = ~ 0.73회전
이 값은 다음 예제 VEXcode GO 솔루션에 사용됩니다.
