
การสนับสนุนทางคณิตศาสตร์
เมื่อมีการสอนห้องปฏิบัติการ 4 และ 5 จะมีการเกี่ยวข้องกับแนวคิดและการคำนวณทางคณิตศาสตร์เพิ่มเติม หน้านี้นำเสนอแหล่งข้อมูลพื้นฐานที่เกี่ยวข้องกับครูเพื่อสนับสนุนคณิตศาสตร์ที่นักเรียนกำลังสำรวจในห้องปฏิบัติการเหล่านี้
คณิตศาสตร์ของการขับรถ
เพื่อทำให้ขบวนแห่ในห้องปฏิบัติการ 4 เสร็จสมบูรณ์ นักเรียนจะต้องขับรถขบวน Code Base
ไปตามเส้นทางขบวนแห่ที่เป็นเส้นตรง แทนที่จะใช้บล็อกระบบส่งกำลังที่ขยับล้อทั้งสองในเวลาเดียวกัน
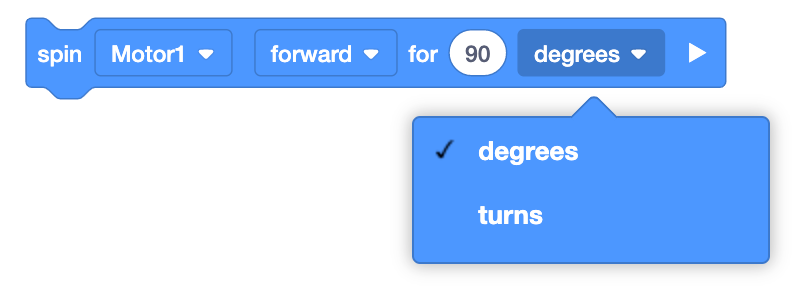
นักเรียนจะใช้บล็อก [Spin for] ใน VEXcode GO ดังที่แสดงที่นี่
เพื่อหมุนมอเตอร์ที่เชื่อมต่อกับล้อและเคลื่อนหุ่นยนต์ไปข้างหน้า [หมุนสำหรับ] บล็อกยอมรับ 'รอบ' หรือ 'องศา'
เป็นพารามิเตอร์ ในห้องปฏิบัติการที่ 4
นักเรียนจะคำนวณจำนวนรอบที่ต้องป้อนเข้าในโครงการนี้เพื่อขับเคลื่อนหุ่นยนต์ให้ได้ตามระยะทางของเส้นทางขบวนพาเหรด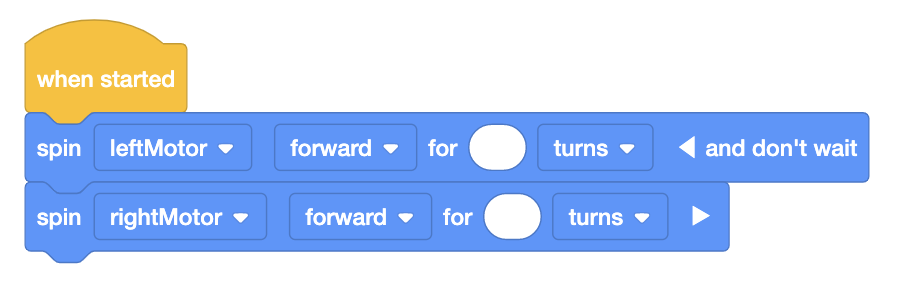
ดูวิดีโอด้านล่างเพื่อเรียนรู้เกี่ยวกับวิธีการคำนวณจำนวนรอบของล้อที่จำเป็นในการขับเคลื่อนหุ่นยนต์ของคุณตรงไปในระยะทางที่กำหนด
ข้อมูลอ้างอิงที่เป็นประโยชน์:
คำศัพท์และค่าของล้อสีเทา:
| ภาคเรียน | คำนิยาม | ภาพ | สูตร | ค่า |
|---|---|---|---|---|
| เส้นผ่านศูนย์กลาง | การวัดเส้นตรงที่ตัดผ่านจุดศูนย์กลางของวงกลม | 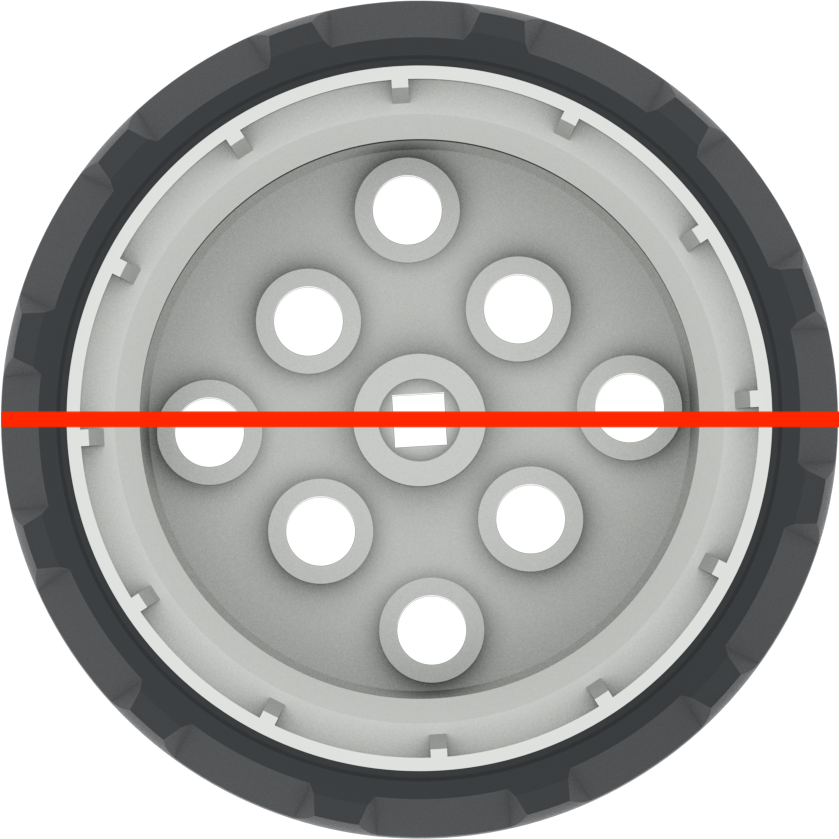 |
d = 2 ร | ~ 50.93 มม. หรือ 2 นิ้ว |
| เส้นรอบวง | ระยะทางรวมรอบนอกวงกลม |  |
C = π ง | ~ 160 มม. หรือ 6.25 นิ้ว |
การวัดอย่างแม่นยำ
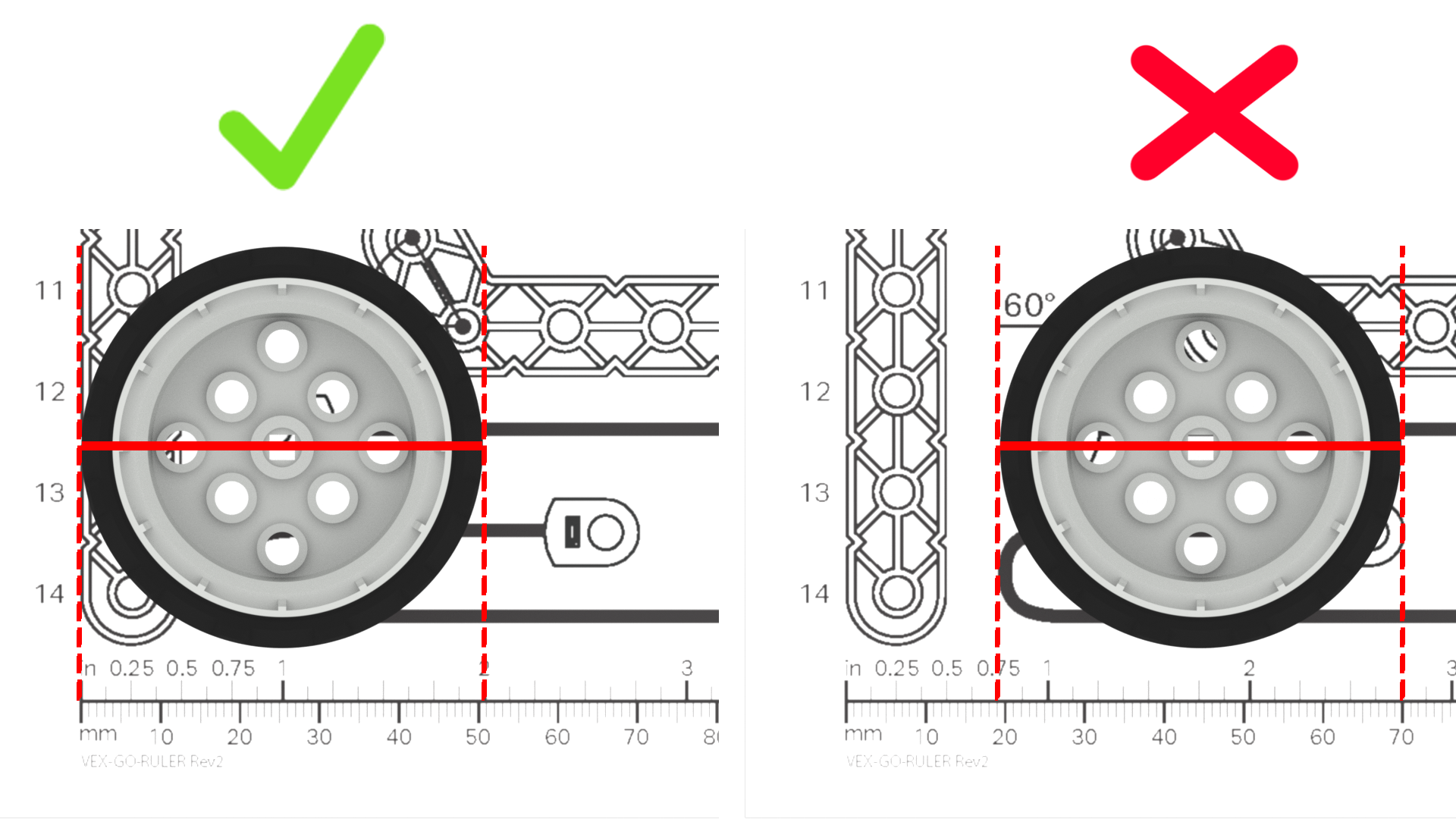
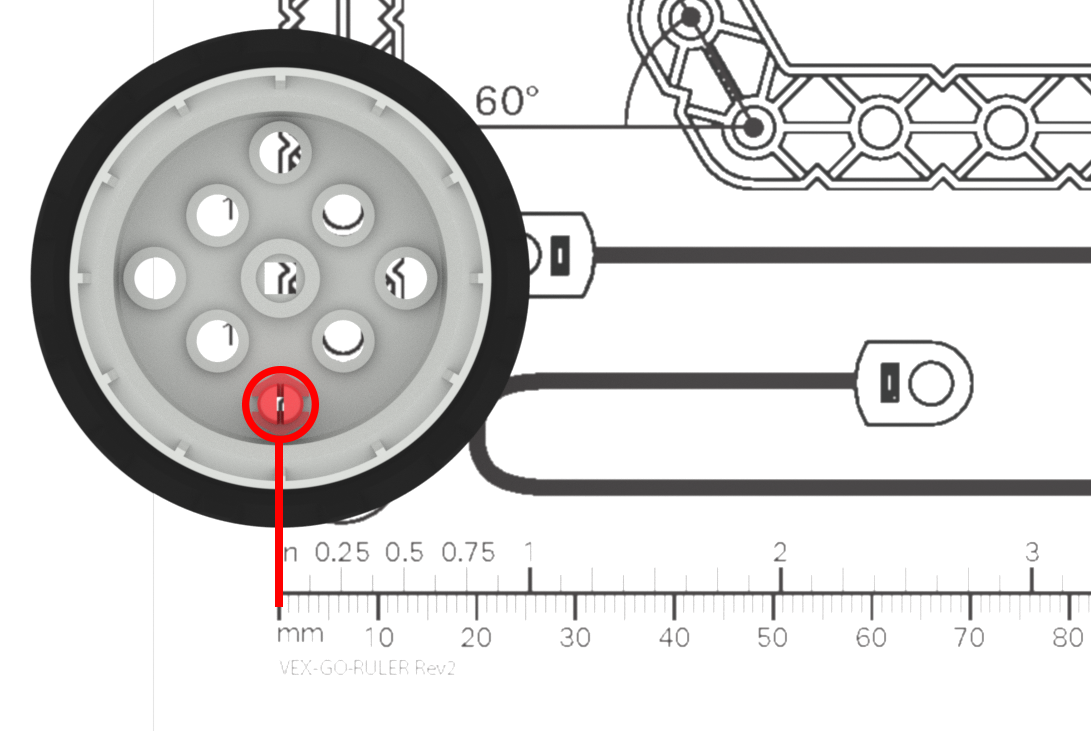
เมื่อนักเรียนกำลังวัด ให้แน่ใจว่าจะแนะนำให้เขาวัดอย่างระมัดระวังและแม่นยำคุณสามารถใช้ ไม้บรรทัดสำหรับพิมพ์ VEX GO เพื่อให้นักเรียน วัดหรือผู้ปกครองห้องเรียน.
- เตือนนักเรียนให้เริ่มวัดจากจุดศูนย์บนไม้บรรทัด และใส่ใจจุดสิ้นสุดของวัตถุที่กำลังวัดอย่างใกล้ชิด การเริ่มต้นหรือการสิ้นสุดการวัดที่ไม่แม่นยำจะส่งผลต่อการคำนวณและการเคลื่อนไหวในที่สุดของหุ่นยนต์
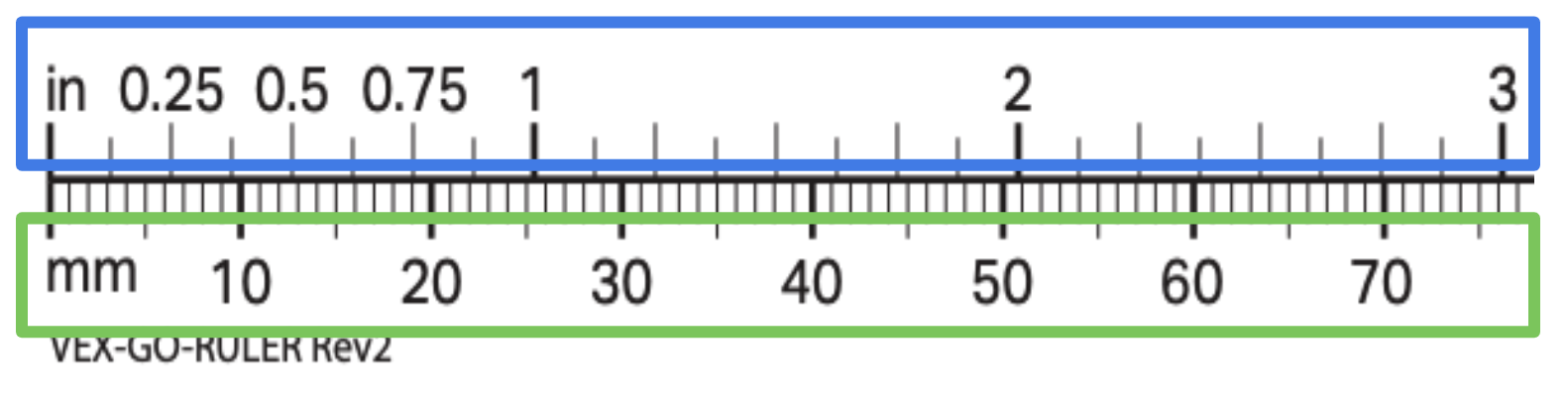
- ให้แน่ใจว่านักเรียนรู้วิธีอ่านเครื่องหมายบนไม้บรรทัดที่พวกเขากำลังใช้เพื่อที่จะวัดได้อย่างถูกต้อง If the rulers you are using have both imperial and metric units (like ไม้บรรทัดสำหรับพิมพ์ VEX GO) be sure that students are consistently using the same units of measure.
- นักเรียนสามารถปัดเศษการวัดของตนเป็นหน่วยที่ใกล้เคียงที่สุด หรือเศษส่วนของหน่วย การปัดเศษสามารถทำให้การคำนวณง่ายขึ้นได้หากจำเป็น แต่ก็สามารถทำให้การวัดแม่นยำน้อยลงได้เช่นกัน ตัวอย่างเช่น คุณอาจสั่งให้นักเรียนปัดขึ้นเป็นครึ่งนิ้วหรือเซนติเมตร แต่หุ่นยนต์ของพวกเขาจะเคลื่อนที่ไปไกลกว่าที่ตั้งใจไว้ในตอนแรกเล็กน้อย อีกวิธีหนึ่ง คุณอาจให้เด็กนักเรียนวัดเป็นหน่วย ⅛ นิ้ว หรือมิลลิเมตรที่ใกล้ที่สุด แล้วพบว่าหุ่นยนต์ของพวกเขาเคลื่อนที่ได้ใกล้ระยะทางที่ตั้งใจไว้มากขึ้น
- หากนักเรียนต้องการฝึกฝนเพิ่มเติมเกี่ยวกับการวัด คุณสามารถใช้ ฝึกฝน การวัดกิจกรรม VEX GO กับนักเรียนเป็นรายบุคคลหรือเป็นกลุ่ม หรือเป็นกิจกรรมทั้งชั้นเรียน.
คณิตศาสตร์ของการหมุน 360°
เพื่อทำให้ขบวนแห่ในห้องปฏิบัติการที่ 5 เสร็จสมบูรณ์ นักเรียนจะต้องขับรถขบวน Code Base ไปตามเส้นทางขบวนแห่โดยมีการเลี้ยว
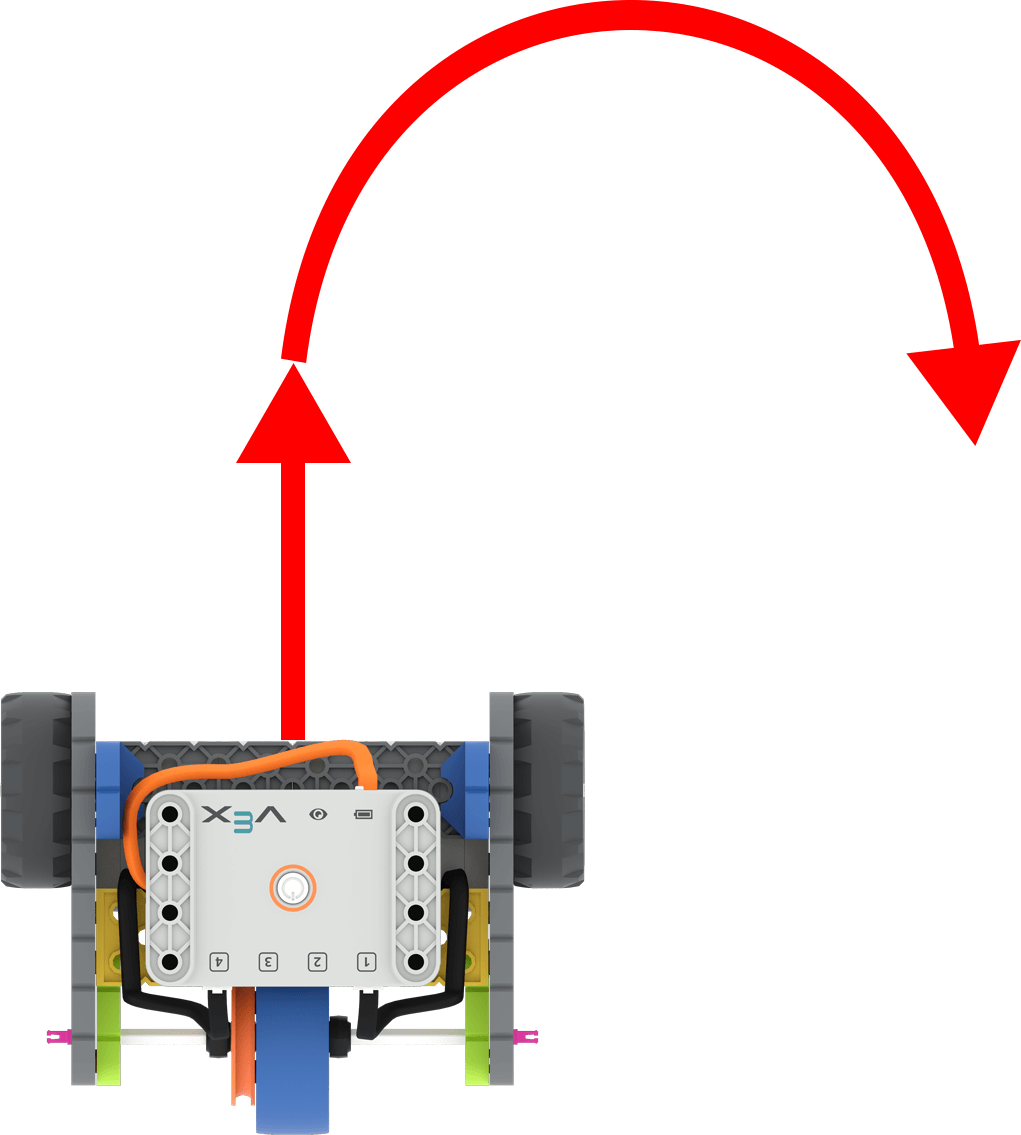
โค้ดเบสพร้อมลูกศรแสดงการขับไปข้างหน้าแล้วเลี้ยวขวา
นักเรียนจะสร้างสิ่งที่เรียนรู้เกี่ยวกับการเขียนโค้ดให้หุ่นยนต์เดินทางเป็นเส้นตรง
การเขียนโค้ดให้หุ่นยนต์ขับระยะทางที่ไม่เป็นเชิงเส้น หรือการเลี้ยว
นักเรียนยังคงคำนวณจำนวนรอบที่จำเป็นในการเดินทางระยะทางที่กำหนด
ดังนั้นพวกเขาจะใช้สูตรเดียวกันกับในแล็บก่อนหน้านี้
ชมวิดีโอด้านล่างเพื่อเรียนรู้วิธีการคำนวณจำนวนรอบของล้อที่จำเป็นในการขับเคลื่อนหุ่นยนต์ 360° รอบพร้อมกับนักเรียนของคุณ
ข้อมูลอ้างอิงที่เป็นประโยชน์:
เมื่อฐานโค้ดหมุน ล้อขับเคลื่อนจะเคลื่อนที่ไปในทิศทางตรงข้ามเพื่อหมุนหุ่นยนต์ ตัวอย่างเช่น หากต้องการหมุนหุ่นยนต์ไปทางขวา ล้อซ้ายจะขับไปข้างหน้า ในขณะที่ล้อขวาจะขับถอยหลัง
คำศัพท์และค่าสำหรับฐานโค้ด:
| ภาคเรียน | คำนิยาม | ภาพ | สูตร | ค่า |
|---|---|---|---|---|
| เส้นผ่านศูนย์กลาง | การวัดเส้นตรงจากจุดศูนย์กลางของล้อแต่ละล้อ (เรียกอีกอย่างว่าระยะฐานล้อ) | 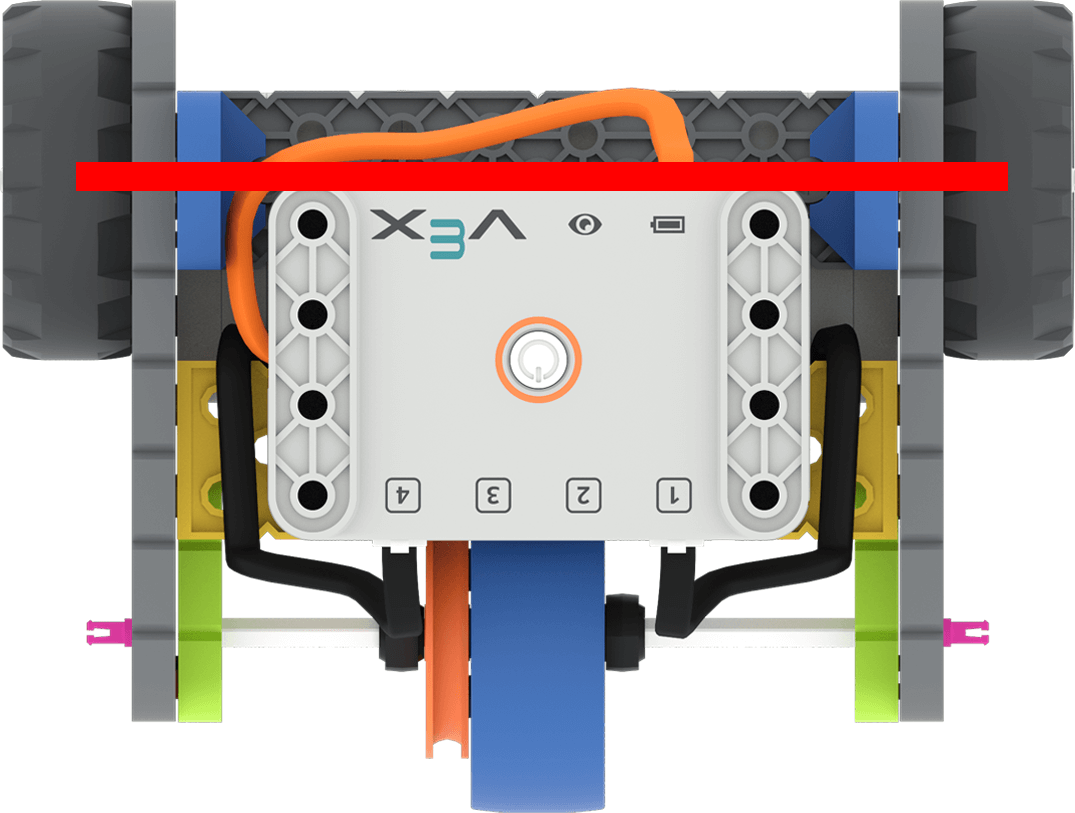 |
d = 2 ร | ~ 135 มม. หรือ 5.3 นิ้ว |
| เส้นรอบวง | ระยะทางรวมที่ล้อขับเคลื่อนเพื่อให้ครบ 360° | 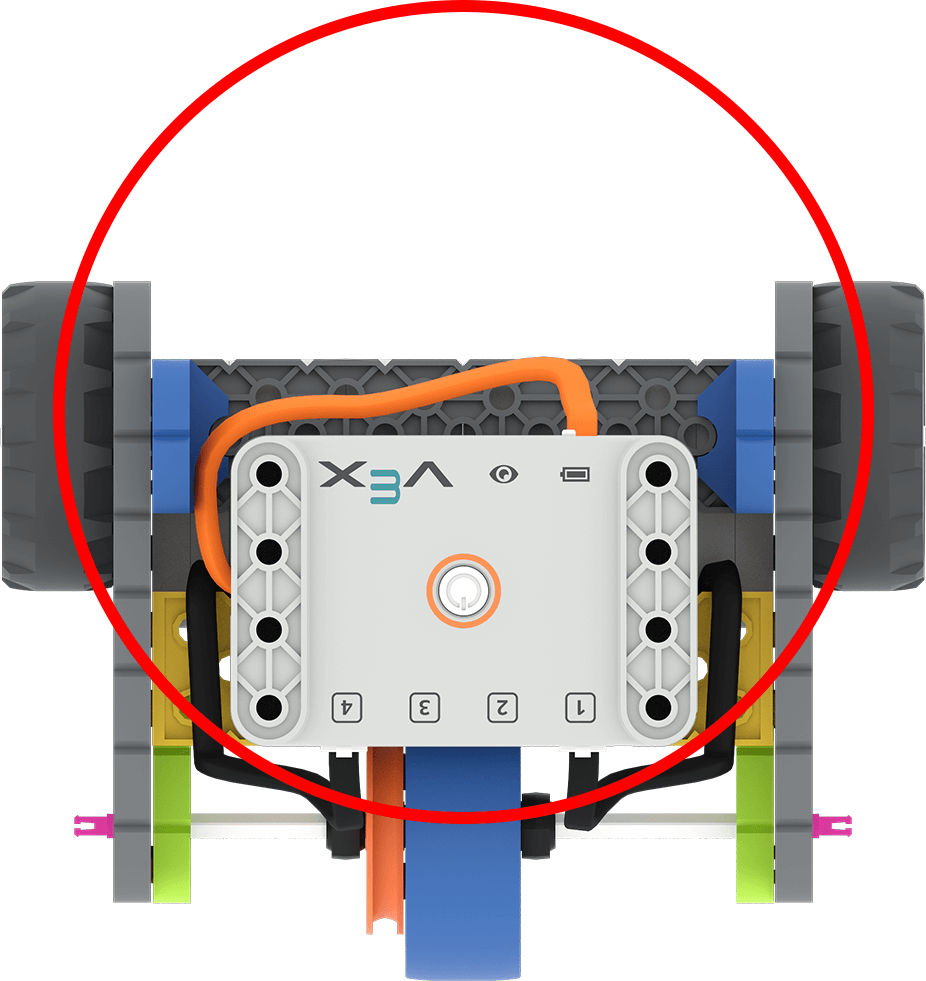
|
C = π ง | ~ 424 มม. หรือ 16.7 นิ้ว |
คณิตศาสตร์ของการหมุนองศาใดๆ
ดูวิดีโอนี้เพื่อเรียนรู้เพิ่มเติมเกี่ยวกับการคำนวณจำนวนรอบของล้อที่จำเป็นเพื่อให้หุ่นยนต์หมุนได้ในทุกองศา
การแปลงเป็นองศา
บล็อก [หมุนสำหรับ] จะยอมรับรอบหรือองศาเป็นพารามิเตอร์ ในการใช้องศา
เพียงคูณจำนวนรอบด้วย 360
ตัวอย่างนี้แสดงจำนวนองศาที่มอเตอร์จะหมุนเพื่อหมุนหุ่นยนต์ให้ครบ° โปรดทราบว่าในโครงการนี้
มอเตอร์จะหมุนไปในทิศทางตรงข้ามกัน และจะเพิ่ม "และอย่ารอ" ลงในบล็อกแรก ดังนั้น มอเตอร์จึงหมุนพร้อมกัน
การกระทำดังกล่าวจะหมุนหุ่นยนต์ไปทางขวาให้ได้ 360° ตามต้องการ 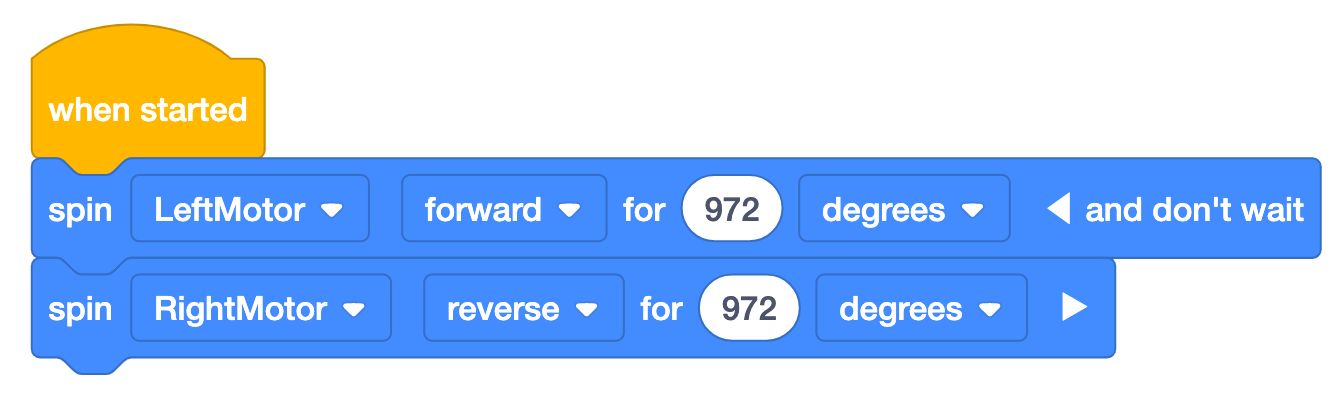
ความเข้าใจผิดที่พบบ่อย
นักเรียนอาจมีความเข้าใจผิดหลายประการเกี่ยวกับการวัดและคณิตศาสตร์ของการขับรถและการเลี้ยว สิ่งเหล่านี้คือบางส่วนที่พบบ่อยที่สุด พร้อมข้อเสนอแนะเกี่ยวกับวิธีการพูดคุยกับนักเรียนของคุณ
| สถานการณ์ | ความเข้าใจผิด | คำแนะนำการแก้ไข |
|---|---|---|
|
ครูถามชั้นเรียนว่า เราควรป้อนอะไรลงในบล็อก [Spin for] เพื่อให้หุ่นยนต์หมุน 90° นักเรียนตอบว่า “90” |
ระยะทางเป็นองศาที่ล้อขับเคลื่อนเพื่อทำการเลี้ยวจะเท่ากับมุมเลี้ยว นักเรียนไม่ได้ใช้เส้นรอบวงการหมุนของหุ่นยนต์เพื่อคำนวณระยะทางเป็นองศาที่ล้อต้องขับเคลื่อน |
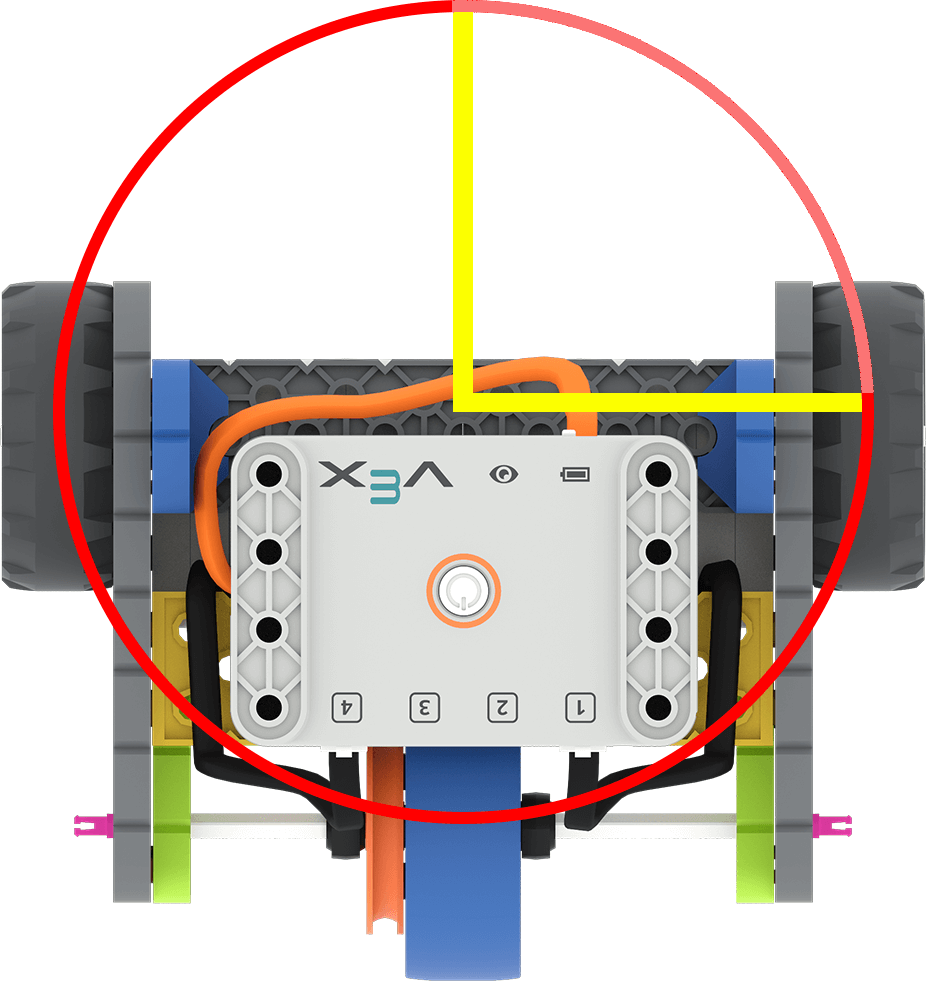
เตือนนักเรียนว่าล้อต้องขับเคลื่อนไปตามเส้นรอบวงที่หมุนจึงจะหมุนได้ (ในภาพนี้จะอยู่ตามวงกลมสีแดงจากเส้นสีเหลืองเส้นหนึ่งไปยังอีกเส้นหนึ่ง)
หมุนวงล้อเพียง 90° เพื่อช่วยให้นักเรียนมองเห็นว่าวงล้อหมุนได้ไกลแค่ไหนจึงจะเดินทางได้ระยะทางที่กำหนด |
|
ครูถามชั้นเรียนว่า เราควรป้อนอะไรลงในบล็อก [Spin for] เพื่อให้หุ่นยนต์เคลื่อนไปข้างหน้า 12 นิ้ว นักเรียนตอบว่า “12” |
จำนวนรอบของล้อเท่ากับระยะขับเคลื่อนที่ต้องการ นักเรียนไม่ได้ใช้เส้นรอบวงของล้อในการคำนวณจำนวนรอบของล้อเพื่อขับระยะทางที่ต้องการ |
เตือนนักเรียนถึงระยะทางที่หุ่นยนต์เคลื่อนที่ได้ด้วยการหมุนล้อ 1 รอบ และถามว่าการหมุน 12 รอบดูมากเกินไปหรือใช้น้อยเกินไปสำหรับการเคลื่อนที่ 12 นิ้ว เพื่อช่วยให้นักเรียนมองเห็นภาพได้ดีขึ้น ให้กลิ้งวงล้อไปตามไม้บรรทัด 12 รอบ เพื่อแสดงให้นักเรียนเห็นว่าระยะทางดังกล่าวคือเท่าไร
เตือนนักเรียนว่าการหมุนล้อ 1 รอบจะเท่ากับเส้นรอบวงของล้อ และ 12 นิ้วจะต้องหารด้วยเส้นรอบวงนั้น |
| นักเรียนกำลังวัดวงล้อ แต่ ไม่มีขอบของวงล้ออยู่บนเครื่องหมายศูนย์ของไม้บรรทัด |
ไม้บรรทัดเริ่มต้นที่ 1 ไม่ใช่ศูนย์ นักเรียนไม่ได้ใช้ไม้บรรทัดอย่างถูกต้องเพื่อให้ได้การวัดที่แม่นยำ |
เตือนนักเรียนว่าไม้บรรทัดจะเริ่มต้นที่เครื่องหมาย "0" และถ้านักเรียนไม่ได้วัดจากจุดนั้น การวัดของพวกเขาจะไม่ถูกต้อง คุณอาจต้องการทำเครื่องหมายจุดเริ่มต้นของไม้บรรทัดด้วยเทปหรือปากกามาร์กเกอร์สี เพื่อเป็นตัวช่วยเสริมการมองเห็นสำหรับนักเรียนขณะที่พวกเขากำลังทำงาน (For extra practice with measuring, students can complete the Practice Measuring Activity.) |
|
นักศึกษาคนหนึ่งบอกว่าโครงการของเขาไม่ได้ผล ครูสังเกตเห็นว่าจำนวนรอบของวงล้อที่ถูกต้องนั้นอยู่ในบล็อก [หมุนสำหรับ] แต่พารามิเตอร์ถูกตั้งค่าเป็น 'องศา' |
หน่วยหรือพารามิเตอร์สามารถใช้แทนกันได้ นักเรียนไม่ได้ใส่ใจกับพารามิเตอร์/หน่วยวัดในโครงการของตน |
ถามนักเรียนว่าพวกเขาใช้หน่วยวัดอะไร และตรงกับพารามิเตอร์ในบล็อกหรือไม่
|
| นักเรียนพยายามป้อน '21/4' เข้าไปในพารามิเตอร์ของบล็อก [หมุนเพื่อ] เพื่อป้อน "2 ¼ รอบ" |
เศษส่วนและทศนิยมเขียนด้วยวิธีเดียวกัน นักเรียนไม่ได้แปลงเศษส่วนเป็นทศนิยม |
เตือนนักเรียนว่าพวกเขาจำเป็นต้องแปลงเศษส่วนเป็นทศนิยมเพื่อให้สามารถจดจำได้ ในการดำเนินการนี้
ให้หารตัวเศษด้วยตัวส่วน 2 ¼=94 =2.25 คุณอาจต้องการให้นักเรียนสร้างแผนภูมิค่าเศษส่วนที่ใช้บ่อยและค่าเทียบเท่าทศนิยมเพื่อสร้างแหล่งข้อมูลของตนเอง |
|
ครูขอให้เด็กนักเรียนแบ่งปันการคำนวณเส้นรอบวงล้อของพวกเขา คำตอบของนักเรียน |
เส้นรอบวงคำนวณโดยใช้รัศมี -πxรัศมี. นักเรียนใช้การวัดที่ผิดพลาดในการคำนวณ |
เตือนนักเรียนว่าเส้นรอบวงนั้น π x
เส้นผ่านศูนย์กลาง; และเส้นผ่านศูนย์กลางเป็นเส้นตรงพาดผ่านศูนย์กลาง
ของล้อ (หรือรัศมีสองเท่า)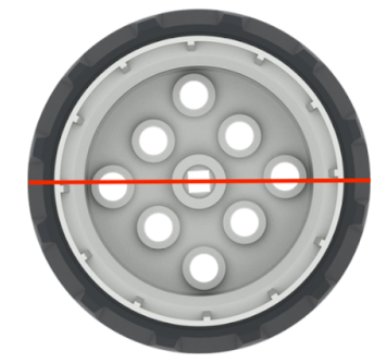 คุณอาจต้องการวัดและคำนวณมูลค่าเป็นกิจกรรมทั้งชั้นเรียน หากนักเรียนหลายคนประสบปัญหาในการใช้สูตร |
 เตือนนักเรียนว่าการคำนวณของพวกเขาจะทำงานได้ตามที่ตั้งใจไว้ก็ต่อเมื่อตั้งค่าพารามิเตอร์เป็นหน่วยที่ถูกต้องเท่านั้น
รอบและองศาไม่ใช่ค่าเดียวกัน
เตือนนักเรียนว่าการคำนวณของพวกเขาจะทำงานได้ตามที่ตั้งใจไว้ก็ต่อเมื่อตั้งค่าพารามิเตอร์เป็นหน่วยที่ถูกต้องเท่านั้น
รอบและองศาไม่ใช่ค่าเดียวกัน
ตัวอย่างโซลูชั่น
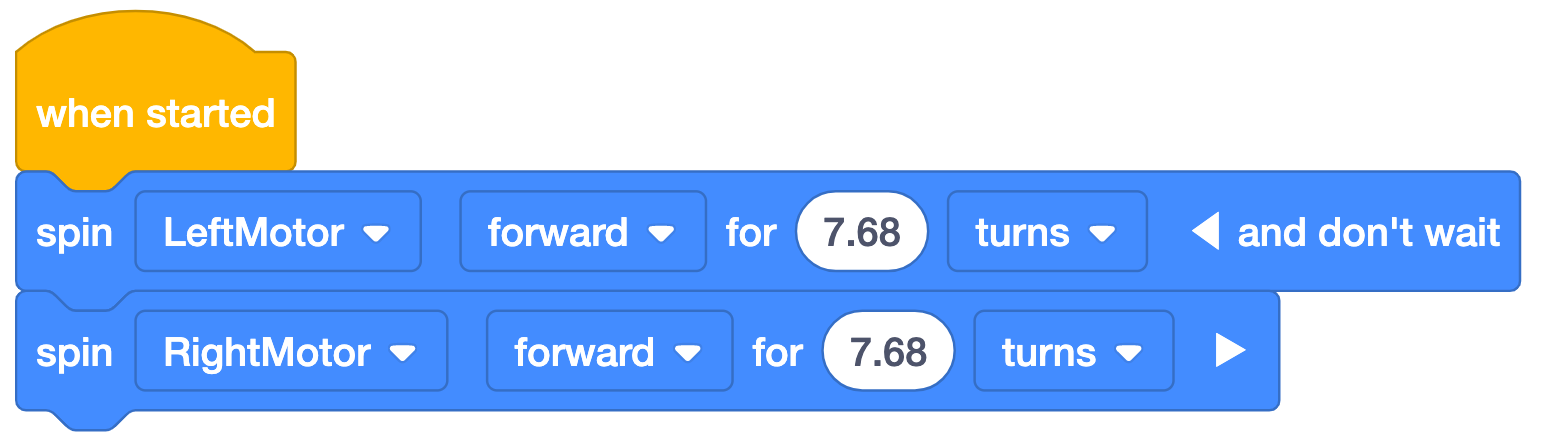
แล็บ 4 ตัวอย่างโซลูชัน
*หมายเหตุ: ' อย่ารอ' ใช้กับบล็อกแรกในโครงการตัวอย่างเพื่อให้ทั้งสองบล็อกดำเนินการพร้อมกัน หากไม่มี "และอย่ารอ" มอเตอร์ตัวแรกจะหมุน จากนั้นมอเตอร์ตัวที่สอง และฐานโค้ดจะไม่ทำงานตามที่ตั้งใจไว้ ให้แน่ใจว่านักเรียนจะไม่ยุบและอย่ารอ ไม่เช่นนั้นโครงการของพวกเขาจะไม่ดำเนินไปตามที่ตั้งใจไว้

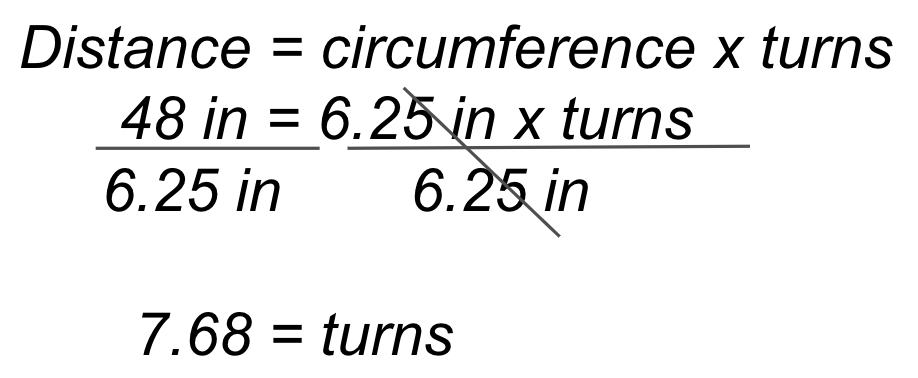
เพื่อขับเคลื่อนเส้นทางขบวนพาเหรดความยาว 48 นิ้ว (~122 ซม.) ฐานโค้ดจะต้องเดินทาง ~7.68
โค้ง. การคำนวณจะแสดงทางด้านซ้าย และตัวอย่างโซลูชัน VEXcode GO ทางด้านขวา
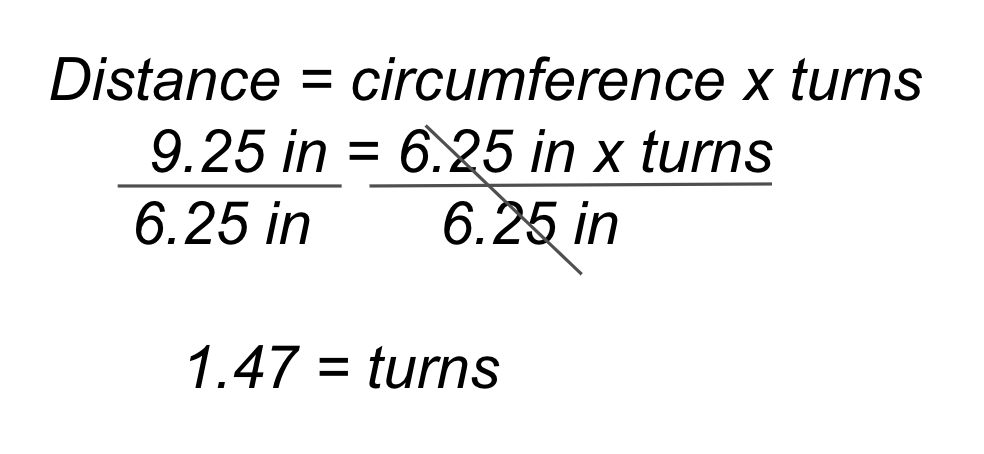
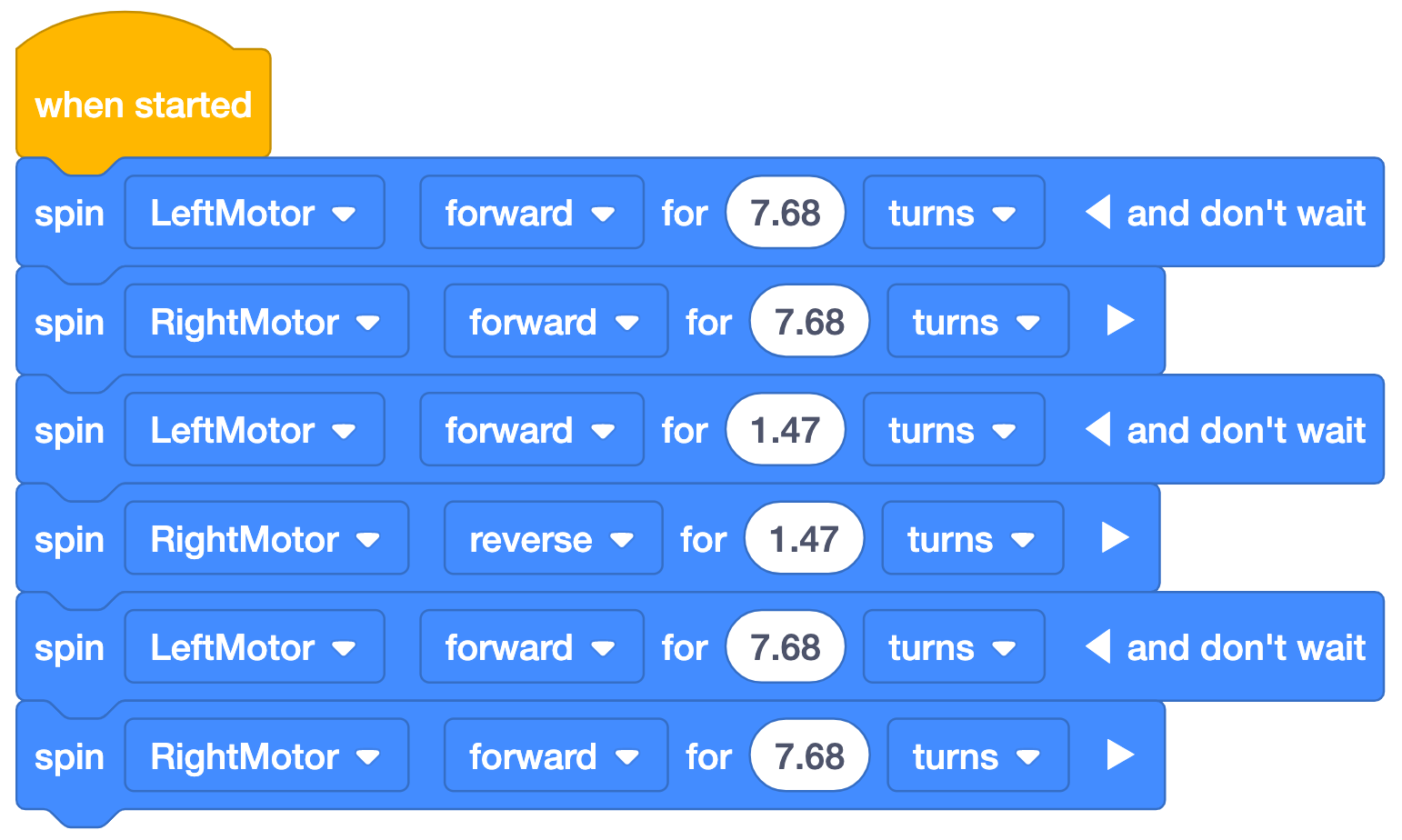
แล็บ 5 ตัวอย่างโซลูชัน
ในการขับเคลื่อนเส้นทางขบวนพาเหรดความยาว 48 นิ้ว (~122 ซม.) และเลี้ยว 180 องศา ฐานโค้ดจะต้องเคลื่อนที่ไปข้างหน้าประมาณ 7.68 รอบ จากนั้น รอบหมุนมอเตอร์ตัวหนึ่งไปข้างหน้าและอีกตัวหนึ่งถอยหลังประมาณรอบ การคำนวณจะแสดงควบคู่กับตัวอย่างโซลูชัน VEXcode GO ทางด้านขวา
หมายเหตุ: หากต้องการใช้องศาแทนจำนวนรอบ ให้คูณ จากการคำนวณจำนวนรอบด้วย
360
เส้นทางพาเหรดส่วนต่อขยาย
หากนักเรียนต้องการความท้าทายเพิ่มเติม คุณสามารถขยายเส้นทางขบวนพาเหรดได้หลายวิธี นี่คือตัวอย่างหนึ่งพร้อมวิธีแก้ปัญหาที่เป็นไปได้
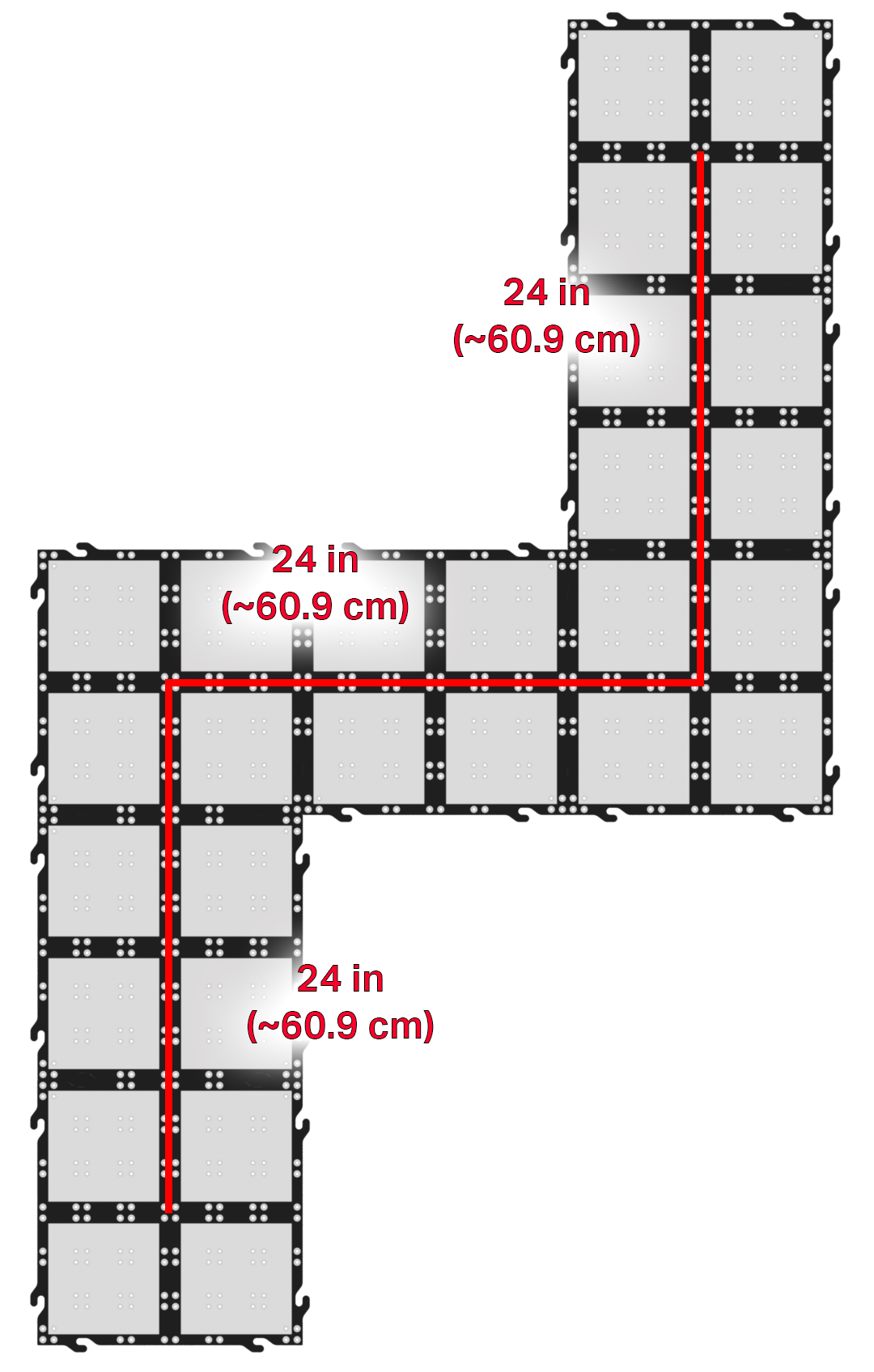
ในเส้นทางตัวอย่างนี้ ระยะทางในการขับรถและการเลี้ยวจะลดลงครึ่งหนึ่งจากห้องทดลอง อย่างไรก็ตาม ในเส้นทางนี้
ทิศทางของการเลี้ยวมีความสำคัญ นอกจากการคำนวณใหม่แล้ว
นักเรียนยังจะต้องคิดหาทิศทางในการหมุนวงล้อให้ไปในทิศทางที่ต้องการด้วย
การคำนวณที่ลดลงครึ่งหนึ่งจากแล็บก่อนหน้านี้เป็นดังนี้:
ระยะทางขับขี่ = ~ 3.84 รอบ
ระยะทางเลี้ยว = ~ 0.73 รอบ
ค่าเหล่านี้ใช้ในตัวอย่างโซลูชัน VEXcode GO ต่อไปนี้:
