
| الكمية | المواد اللازمة |
|---|---|
| 2 |
مجموعات بدء تشغيل VEX V5 Classroom (مع برامج ثابتة محدثة) |
| 1 |
لفة شريط لاصق |
| 1 |
مواد لصنع منحدر صغير (الخشب، الورق المقوى، المجلدات، إلخ.) |
| 1 |
عصا العداد |
| 1 |
دفتر ملاحظات هندسي |
الخطوة 1: إخلاء المسكن
 مضمار سباق
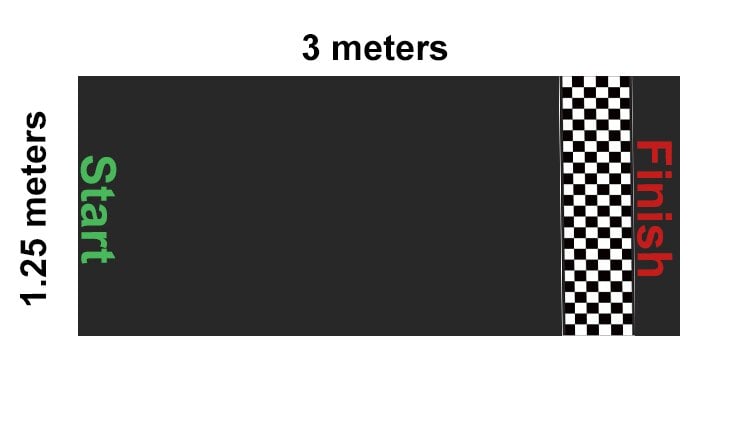
مضمار سباق تتمثل الخطوة الأولى في إنشاء دورة تدريبية لجهاز V5 Clawbot الخاص بك في تنظيف مساحة على الأرض تبلغ حوالي 3 أمتار (119 بوصة) × 1.25 متر (49 بوصة). سيكون هذا هو مضمار السباق وسيسمح لاثنين من روبوتات المخلب بالسباق جنبًا إلى جنب في نفس الوقت. ضع علامة على المساحة بشريط أو بطريقة ما بحيث يتم وضع علامة واضحة على المسار بخطوط البداية والانتهاء.
![]() نصائح للمعلم
نصائح للمعلم
-
حدد مساحة 3 أمتار (119 بوصة) × 1.25 متر (49 بوصة). يمكن تقليص المسار والمنحدر في الحالات التي تكون فيها المساحة محدودة، ولكن يجب أن يكون عرض المسار واسعًا بما يكفي لاستيعاب سباقي V5 Clawbots في نفس الوقت.
-
تعزيز التطوير الواعي لمهارات التعلم التعاوني من خلال مراجعة نصائح الاستراتيجية والعمل الجماعي (Google / .docx / .pdf) مع الطلاب.
-
اجمع المواد لبناء المنحدر مسبقًا. هناك مواد موصى بها في قسم الأجهزة/البرامج، ولكن أي شيء من المجلدات ثلاثية الحلقات إلى الخشب الرقائقي سيكون كافيًا.
الخطوة 2: بناء منحدر
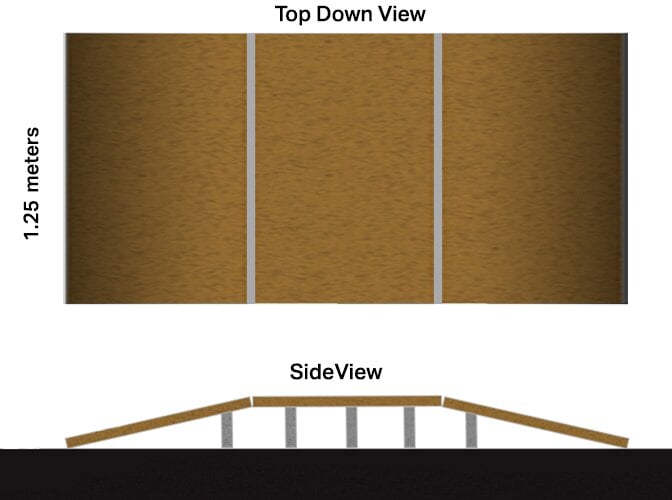
الخطوة التالية هي بناء منحدر بعرض المسار (حوالي 1.25 متر أو 49 بوصة). يمكن بناء المنحدر باستخدام الخشب أو الورق المقوى أو أي شيء متاح قوي بما يكفي لتحمل وزن اثنين من أجهزة مخلب V5. يجب أن يكون للمنحدر منحدران، أولاً لأعلى ثم لأسفل، ويجب أن يكون منحدرًا تدريجيًا حتى لا تكون هناك فجوات في أي من طرفيه.
الخطوة 3: وضع المنحدر
 مضمار سباق
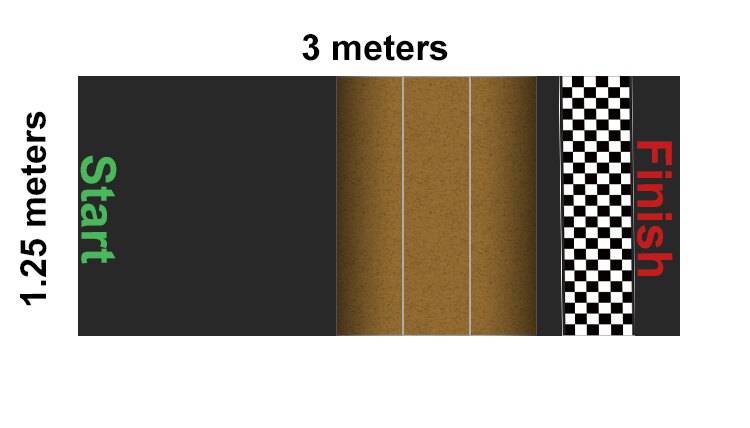
مضمار سباق حرك المنحدر إلى النصف الثاني من الدورة. يجب أن يكون المنحدر على بعد 1.5 متر (59 بوصة) على الأقل من خط البداية. تأكد من وضع المنحدر بحيث تكون جوانبه موازية تمامًا لجوانب المسار. بمعنى آخر، تأكد من أن المنحدر ليس ملتويًا حتى تتمكن العجلات الأمامية لـ V5 Clawbot من الوصول إلى المنحدر في نفس الوقت تمامًا.
الخطوة 4: إعداد الروبوت

قم بتشغيل دماغ الروبوت V5، وتأكد من إقرانه بوحدة التحكم V5، وقم بتشغيل برنامج Drive على دماغ الروبوت V5 حتى تتمكن من قيادة الروبوت لاسلكيًا باستخدام وحدة التحكم V5.
الخطوة 5: الجري بذراع الراحة
يجب أن تكون أذرع V5 Clawbots لأسفل في وضع البداية أو الراحة.
![]() نصائح للمعلم
نصائح للمعلم
-
تأكد من خفض ذراع كل V5 Clawbot إلى وضع البداية أو الراحة.
-
قم بتجميع الفرق في مجموعات ثنائية. خلال الجولة الأولى، سيسابق كل زوج V5 Clawbots ضد بعضهم البعض.
-
استخدم شريحة روبن مستديرة إذا كان هناك عدد غير متساوٍ من الفرق.
-
قم بتدوير الثنائيات بعد كل جولة، إذا كان لديك أربعة فرق أو أكثر. تأكد من أن أسرع فريقين يواجهان بعضهما البعض في الجولة التالية، ثم أسرع فريقين، وما إلى ذلك.
الخطوة 6: الركض بذراع بزاوية
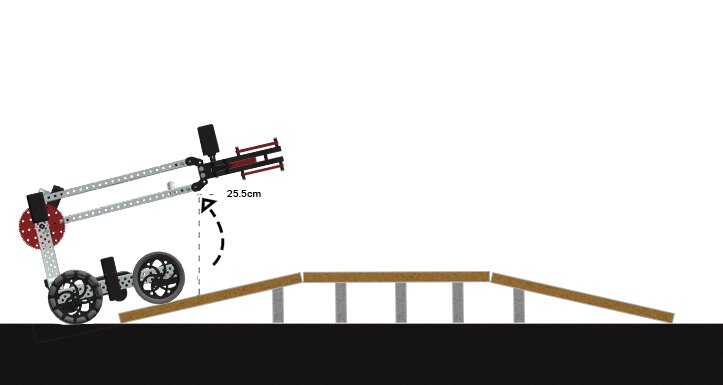
خلال الجولة الثانية، سوف تتسابق الأزواج الجديدة مرة أخرى وجهاً لوجه.
في هذه الجولة، يجب رفع ذراع كل مخلب على الأقل 25.5 سم (حوالي 10 بوصات) فوق موضع البداية.
![]() نصائح للمعلم
نصائح للمعلم
-
تحقق من موضع كل ذراع قبل كل سباق للتأكد من وضع الذراع بشكل صحيح.
-
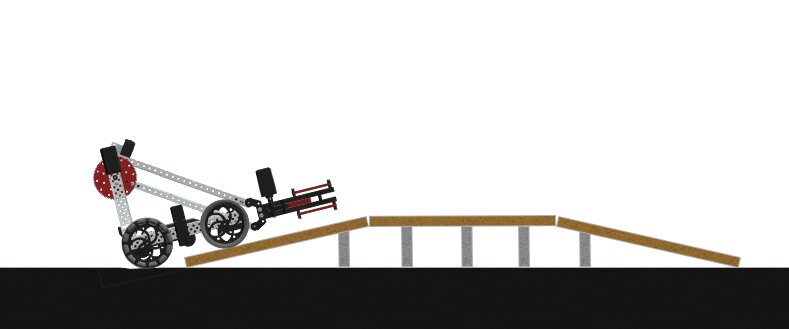
قم بإخطار الطلاب بأن V5 Clawbot عرضة للانقلاب عند رفع ذراع المخلب (خاصة إذا تم رفع الذراع وكان المخلب يحمل شيئًا).
الخطوة 7: الركض بذراع شبه عمودي
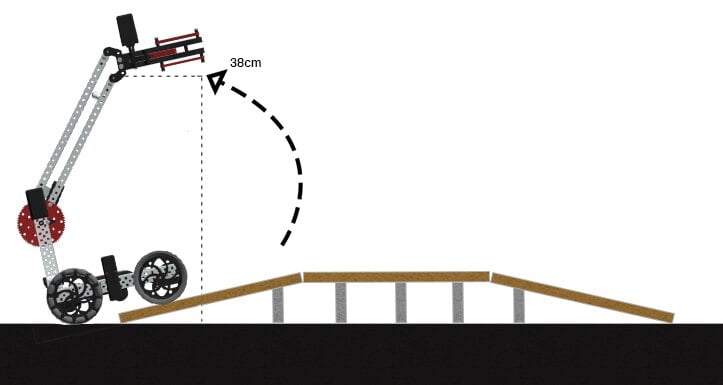
خلال الجولة الثالثة، يجب رفع أذرع V5 Clawbots 38 سم (حوالي 15 بوصة) فوق موضع البداية.
إذا كان لديك فريقان فقط، فإن الفريق الذي يفوز بمباراة الجولة الثالثة هو الفائز في التحدي.
![]() نصائح للمعلم
نصائح للمعلم
-
تحقق من موضع كل ذراع قبل كل سباق للتأكد من وضع الذراع بشكل صحيح.
-
اسمح للفائزين في كل مباراة بالاستمرار في المواجهة في مباراة أخرى في الجولة الثالثة، حتى يظهر فريق واحد كفائز عام.
-
قم بإخطار الطلاب بأن V5 Clawbot عرضة للانقلاب عند رفع ذراع المخلب (خاصة إذا تم رفع الذراع وكان المخلب يحمل شيئًا).