
| Quantidade | Materiais necessários |
|---|---|
| 2 |
VEX V5 Classroom Starter Kits (com firmware atualizado) |
| 1 |
Rolo de Fita |
| 1 |
Materiais para fazer uma pequena rampa (madeira, papelão, aglutinantes, etc.) |
| 1 |
Bastão do medidor |
| 1 |
Caderno de Engenharia |
Passo 1: Limpar um Espaço
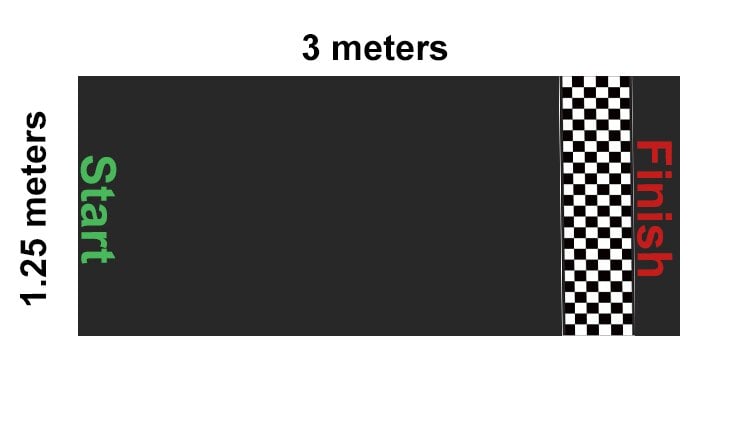 Pista de corrida de
Pista de corrida de O primeiro passo na criação de um curso para o seu Clawbot V5 é limpar um espaço no chão de aproximadamente 3 metros (119 polegadas) por 1,25 metros (49 polegadas). Esta será a pista de corrida e permitirá que dois Clawbots corram lado a lado ao mesmo tempo. Marque o espaço com fita adesiva ou de alguma forma para que a pista fique claramente marcada com linhas de partida e de chegada.
![]() Dicas para Professores
Dicas para Professores
-
Localize um espaço de 3 metros (119 polegadas) por 1,25 metros (49 polegadas). A pista e a rampa podem ser reduzidas nos casos em que há espaço limitado, mas a largura da pista precisa ser larga o suficiente para acomodar dois Clawbots V5 correndo ao mesmo tempo.
-
Promover o desenvolvimento consciente de habilidades de aprendizagem cooperativa, revisando as dicas de Estratégia e Trabalho em Equipe (Google / .docx / .pdf) com os alunos.
-
Reúna materiais para construir a rampa com antecedência. Existem materiais recomendados na seção de hardware/software, mas qualquer coisa, desde aglutinantes de três anéis até madeira compensada, será suficiente.
Passo 2: Construir uma rampa
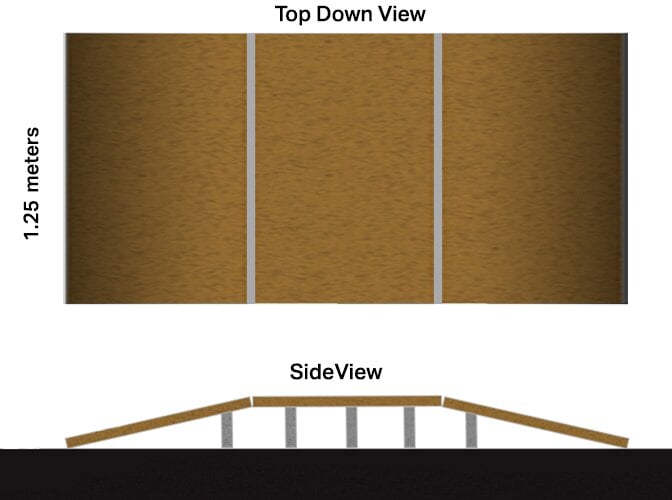 Clawbot
Clawbot O próximo passo é construir uma rampa tão larga quanto o percurso (aprox. 1,25 metros ou 49 polegadas). A rampa pode ser construída usando madeira, papelão ou qualquer coisa disponível que seja forte o suficiente para suportar o peso dos dois Clawbots V5. A rampa deve ter duas inclinações, primeiro para cima e depois para baixo, e deve ser inclinada gradualmente para que não haja lacunas em nenhuma das extremidades.
Etapa 3: Posicionamento da rampa
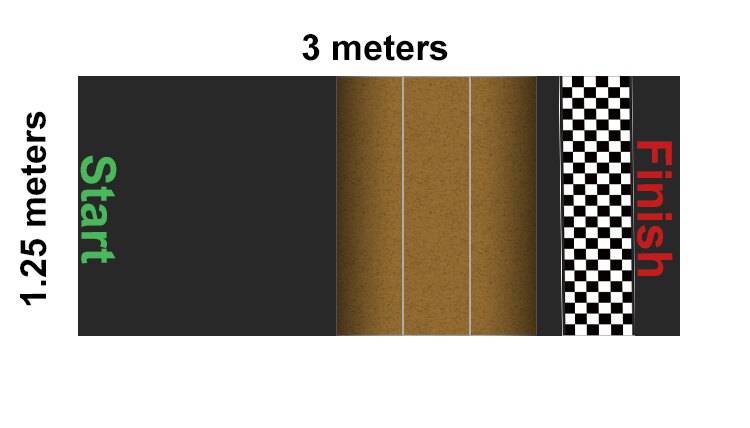 Pista de corrida de
Pista de corrida de Mova a rampa para a segunda metade do percurso. A rampa deve estar a pelo menos 1,5 metros (59 polegadas) da linha de partida. Certifique-se de que a rampa esteja posicionada de modo que seus lados fiquem precisamente paralelos aos lados da pista. Em outras palavras, certifique-se de que a rampa não esteja torta para que as rodas dianteiras do V5 Clawbot possam alcançar a rampa exatamente ao mesmo tempo.
Etapa 4: Preparar o robô
 Clawbot
Clawbot Ligue o Cérebro do Robô V5, certifique-se de que ele esteja emparelhado com o Controlador V5 e execute o programa Drive no Cérebro do Robô V5 para que você possa dirigir seu robô sem fio com o Controlador V5.
Etapa 5: Correr com um braço de descanso
Os Clawbots V5 devem ter os braços totalmente para baixo na posição inicial ou de repouso.
![]() Dicas para Professores
Dicas para Professores
-
Verifique se o braço de cada Clawbot V5 está abaixado para a posição inicial ou de repouso.
-
Agrupe as equipas em duplas. Durante a primeira rodada, cada par competirá com os Clawbots V5 um contra o outro.
-
Utilize um suporte round robin se houver um número ímpar de equipes.
-
Gire as duplas após cada ronda, se tiver quatro ou mais equipas. Certifique-se de que as duas equipes mais rápidas se enfrentem na próxima rodada, depois as próximas duas mais rápidas e assim por diante.
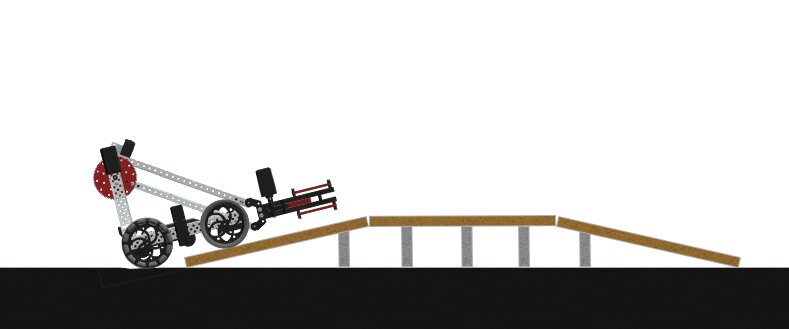
Etapa 6: Correr com um braço angular
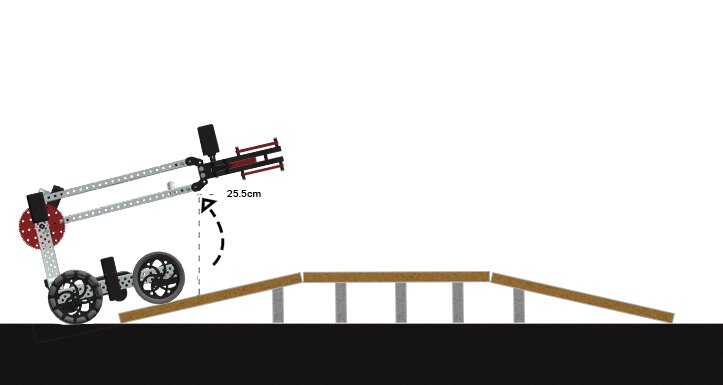
Durante a segunda rodada, os novos pares competirão com seus Clawbots novamente frente a frente.
Nesta rodada, o braço de cada Clawbot deve estar elevado pelo menos 25,5 centímetros (aprox. 10 polegadas) acima de sua posição inicial.
![]() Dicas para Professores
Dicas para Professores
-
Verifique a posição de cada braço antes de cada corrida para garantir que o braço esteja devidamente posicionado.
-
Notifique os alunos de que o Clawbot V5 está propenso a tombar quando o braço da garra é levantado (especialmente se o braço estiver levantado e a garra estiver segurando um objeto).
Etapa 7: Correr com um braço quase vertical
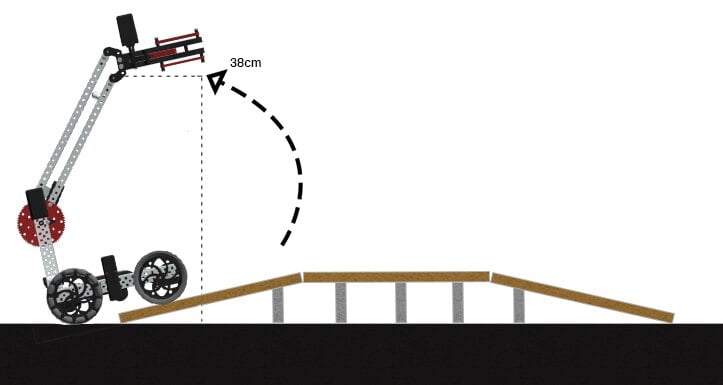
Durante a terceira rodada, os braços dos Clawbots V5 devem ser levantados 38 centímetros (aprox. 15 polegadas) acima de sua posição inicial.
Se tiver apenas duas equipas, a equipa que vencer o confronto da 3 .ª ronda é a vencedora do desafio.
![]() Dicas para Professores
Dicas para Professores
-
Verifique a posição de cada braço antes de cada corrida para garantir que o braço esteja devidamente posicionado.
-
Permita que os vencedores de cada confronto continuem a se enfrentar em outra partida da Rodada 3, até que uma equipe surja como a vencedora geral.
-
Notifique os alunos de que o Clawbot V5 está propenso a tombar quando o braço da garra é levantado (especialmente se o braço estiver levantado e a garra estiver segurando um objeto).