
Het verkennen van het zwaartepunt met de robot
| Aantal | Benodigde materialen |
|---|---|
| 2 |
VEX V5 Classroom Starter Kits (met up-to-date firmware) |
| 1 |
Rol tape |
| 1 |
Materialen om een kleine helling te maken (hout, karton, bindmiddelen, enz.) |
| 1 |
Meterstick |
| 1 |
Technisch notitieboekje |
Stap 1: Een ruimte vrijmaken
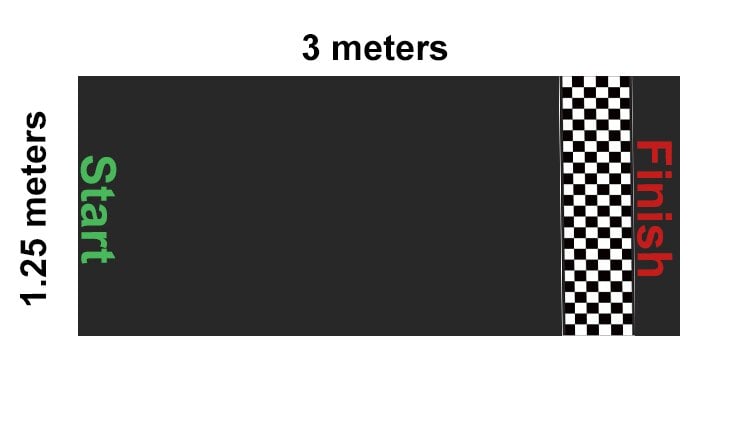
De eerste stap bij het maken van een cursus voor uw V5 Clawbot is het vrijmaken van een ruimte op de vloer van ongeveer 3 meter (119 inch) bij 1,25 meter (49 inch). Dit zal het racecircuit zijn en twee Clawbots tegelijkertijd naast elkaar laten racen. Markeer de ruimte met tape of op een andere manier zodat de baan duidelijk is gemarkeerd met begin- en eindlijnen.
![]() Tips voor leraren
Tips voor leraren
-
Zoek een ruimte van 3 meter (119 inch) bij 1,25 meter (49 inch). De baan en de helling kunnen worden verkleind als de ruimte beperkt is, maar de baan moet wel breed genoeg zijn om twee V5 Clawbots tegelijkertijd te laten racen.
-
Bevorder de bewuste ontwikkeling van vaardigheden voor coöperatief leren door de tips Strategie en Teamwork (Google / .docx / .pdf) met studenten te herhalen.
-
Verzamel vooraf de materialen voor het bouwen van de helling. In het hoofdstuk hardware/software staan aanbevolen materialen, maar alles van ringbanden tot multiplex is voldoende.
Stap 2: Een helling bouwen
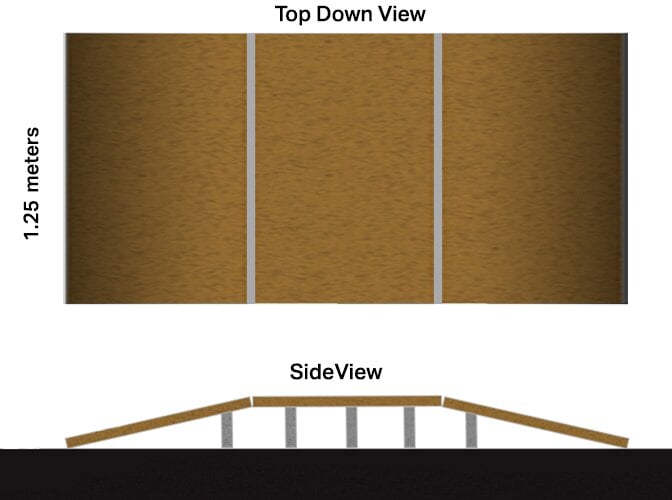
De volgende stap is om een helling te bouwen die zo breed is als de baan (ongeveer 1,25 meter of 49 inch). De oprijplaat kan worden gemaakt van hout, karton of iets anders dat sterk genoeg is om het gewicht van de twee V5 Clawbots te dragen. De hellingbaan moet twee hellingen hebben, eerst naar boven en vervolgens naar beneden, en moet geleidelijk worden hellend zodat er geen gaten aan beide uiteinden zijn.
Stap 3: De helling positioneren
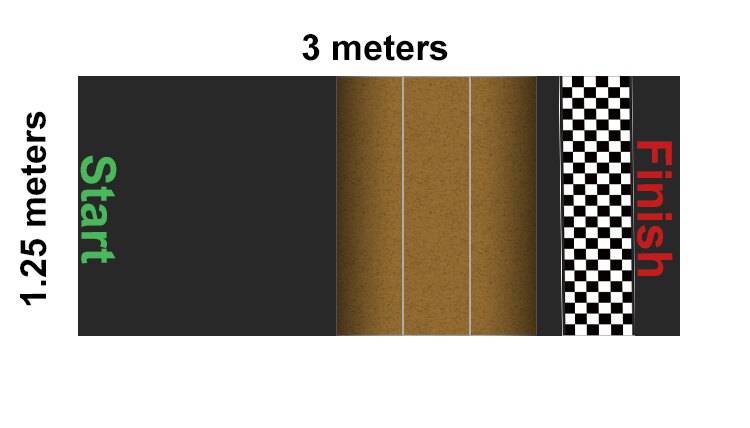
Verplaats de helling naar de tweede helft van de cursus. De oprijplaat moet zich ten minste 1,5 meter (59 inch) van de startlijn bevinden. Zorg ervoor dat de oprijplaat zo is geplaatst dat de zijkanten precies evenwijdig zijn aan de zijkanten van het spoor. Met andere woorden, zorg ervoor dat de oprijplaat niet scheef is, zodat de voorwielen van de V5 Clawbot op precies hetzelfde moment de oprijplaat kunnen bereiken.
Stap 4: De robot voorbereiden

Schakel de V5 Robot Brain in, zorg ervoor dat deze is gekoppeld aan deControlleren voer het Drive-programmauit op de V5 Robot Brainzodat u uw robot draadloos kunt besturen met de V5 Controller.
Stap 5: Rennen met een rustende arm
De V5 Clawbots moeten hun armen helemaal naar beneden hebben in de begin- of rustpositie.
![]() Tips voor leraren
Tips voor leraren
-
Controleer of de arm van elke V5 Clawbot is neergelaten tot in de start- of rustpositie.
-
Verdeel de teams in tweetallen. Tijdens de eerste ronde racet elk paar met de V5 Clawbots tegen elkaar.
-
Gebruik een round robin-schema als er een oneven aantal teams is.
-
Als u vier of meer teams hebt, kunt u de paren na elke ronde laten rouleren. Zorg ervoor dat in de volgende ronde de twee snelste teams tegen elkaar spelen, daarna de twee snelste teams, enzovoort.
Stap 6: Hardlopen met een schuine arm
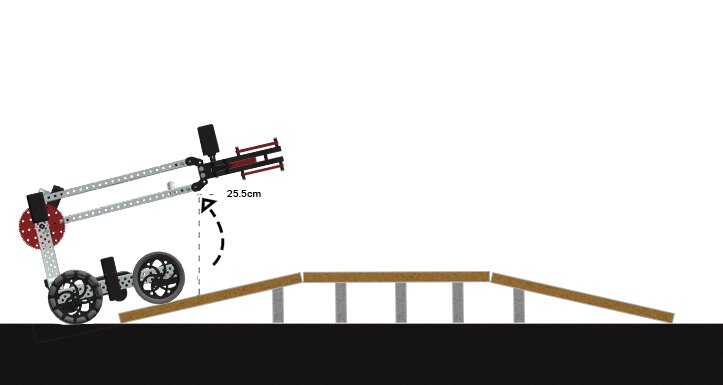
Tijdens de tweede ronde strijden de nieuwe paren opnieuw tegen elkaar met hun Clawbots.
In deze ronde moet de arm van elke Clawbot zich minimaal 25,5 centimeter (ongeveer 10 inch) boven de startpositie bevinden.
![]() Tips voor leraren
Tips voor leraren
-
Controleer voor elke race de positie van elke arm om er zeker van te zijn dat de arm correct is gepositioneerd.
-
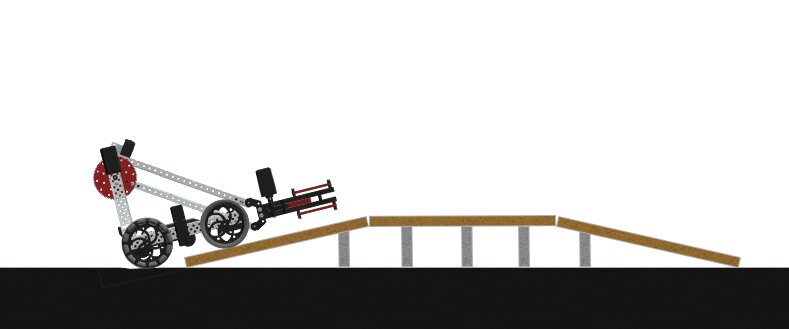
Wijs de leerlingen erop dat de V5 Clawbot kan kantelen wanneer de klauwarm wordt opgetild (vooral als de arm wordt opgetild en de klauw een voorwerp vasthoudt).
Stap 7: Hardlopen met een bijna verticale arm
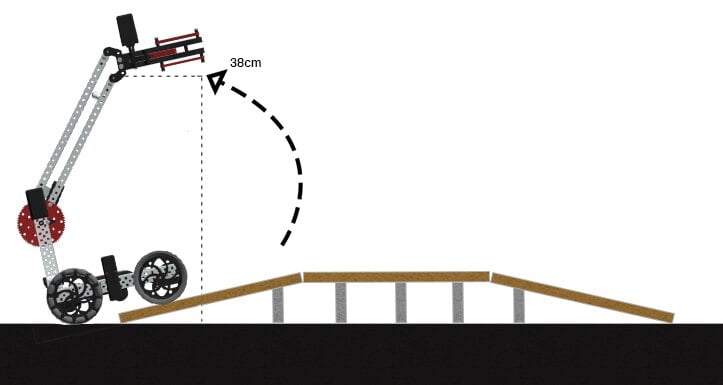
Tijdens de derde ronde moeten de armen van de V5 Clawbots 38 centimeter (ongeveer 15 inch) boven de startpositie worden geheven.
Als je maar twee teams hebt, is het team dat de wedstrijd in ronde 3 wint, de winnaar van de uitdaging.
![]() Tips voor leraren
Tips voor leraren
-
Controleer voor elke race de positie van elke arm om er zeker van te zijn dat de arm correct is gepositioneerd.
-
De winnaars van elke wedstrijd mogen in de derde ronde nog een keer tegen elkaar spelen, totdat één team als algehele winnaar uit de bus komt.
-
Wijs de leerlingen erop dat de V5 Clawbot kan kantelen wanneer de klauwarm wordt opgetild (vooral als de arm wordt opgetild en de klauw een voorwerp vasthoudt).