
| Cantidad | Materiales necesarios |
|---|---|
| 2 |
Kits de inicio de aula VEX V5 (con firmware actualizado) |
| 1 |
Rollo de cinta |
| 1 |
Materiales para hacer una rampa pequeña (madera, cartón, carpetas, etc.) |
| 1 |
Meter Stick |
| 1 |
Cuaderno de ingeniería |
Paso 1: despejar un espacio
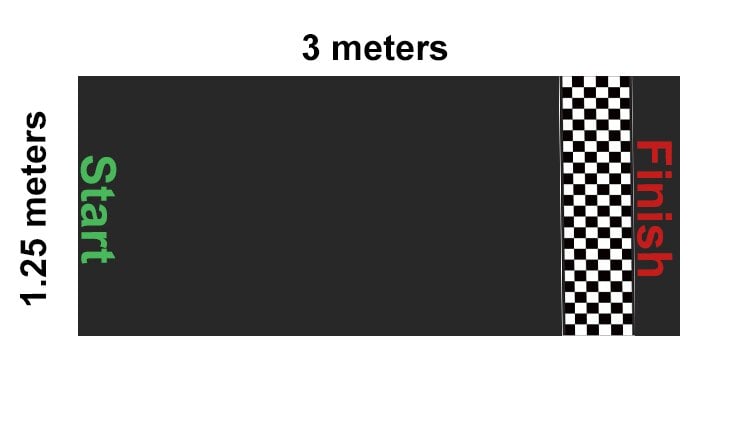 Pista de carreras de
Pista de carreras de El primer paso para crear un campo para tu Clawbot V5 es despejar un espacio en el suelo de aproximadamente 3 metros (119 pulgadas) por 1,25 metros (49 pulgadas). Esta será la pista de carreras y permitirá que dos Clawbots compitan uno al lado del otro al mismo tiempo. Marque el espacio con cinta adhesiva o de alguna manera para que la pista esté claramente marcada con las líneas de inicio y finalización.
![]() Consejos para profesores
Consejos para profesores
-
Localice un espacio de 3 metros (119 pulgadas) por 1,25 metros (49 pulgadas). La pista y la rampa se pueden reducir en los casos en que hay espacio limitado, pero el ancho de la pista debe ser lo suficientemente ancho como para acomodar dos V5 Clawbots que compiten al mismo tiempo.
-
Promover el desarrollo consciente de las habilidades de aprendizaje cooperativo revisando los consejos de Estrategia y Trabajo en Equipo (Google / .docx / .pdf) con los estudiantes.
-
Reúna los materiales para construir la rampa con antelación. Hay materiales recomendados en la sección de hardware/software, pero cualquier cosa, desde carpetas de tres anillos hasta madera contrachapada, será suficiente.
Paso 2: Construir una rampa
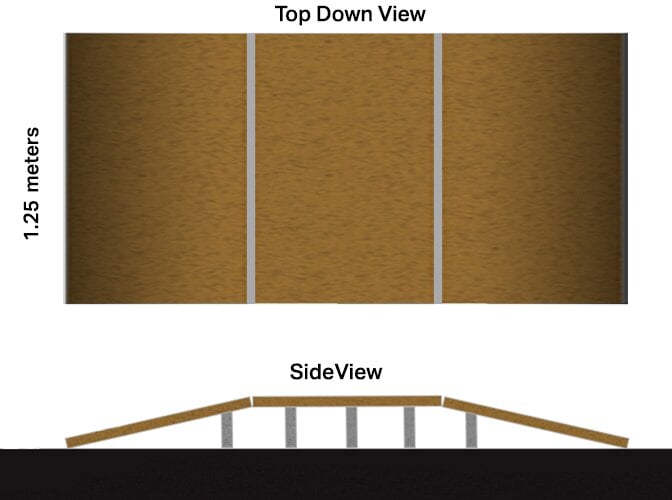
El siguiente paso es construir una rampa que sea tan ancha como el recorrido (aprox. 1,25 metros o 49 pulgadas). La rampa podría construirse con madera, cartón o cualquier cosa disponible que sea lo suficientemente fuerte como para soportar el peso de los dos V5 Clawbots. La rampa debe tener dos pendientes, primero hacia arriba y luego hacia abajo, y debe inclinarse gradualmente para que no haya huecos en ninguno de sus extremos.
Paso 3: Posicionamiento de la rampa
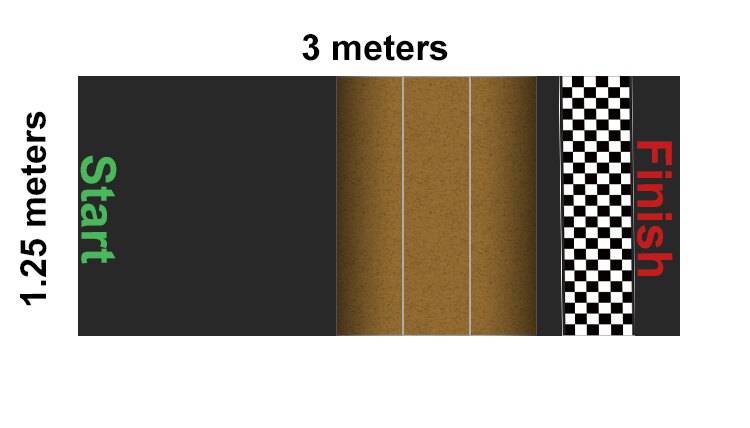 Pista de carreras de
Pista de carreras de Mueva la rampa a la segunda mitad del curso. La rampa debe estar al menos a 1,5 metros (59 pulgadas) de la línea de salida. Asegúrese de que la rampa esté colocada de modo que sus lados estén exactamente paralelos a los lados de la pista. En otras palabras, asegúrese de que la rampa no esté torcida para que las ruedas delanteras del V5 Clawbot puedan llegar a la rampa exactamente al mismo tiempo.
Paso 4: Preparación del robot

Encienda el Cerebro del Robot V5, asegúrese de que esté emparejado con el Controlador V5y ejecute el programa Drive en el Cerebro del Robot V5 para que pueda conducir su robot de forma inalámbrica con el Controlador V5.
Paso 5: Correr con un brazo en reposo
Los Clawbots V5 deben tener sus brazos completamente hacia abajo en la posición inicial o de descanso.
![]() Consejos para profesores
Consejos para profesores
-
Compruebe que el brazo de cada Clawbot V5 esté bajado a la posición de inicio o de reposo.
-
Agrupa a los equipos en parejas. Durante la primera ronda, cada pareja competirá con los V5 Clawbots entre sí.
-
Utilice un soporte de round robin si hay un número impar de equipos.
-
Gira los pares después de cada ronda, si tienes cuatro o más equipos. Asegúrate de que los dos equipos más rápidos se enfrenten en la siguiente ronda, luego los dos siguientes más rápidos, y así sucesivamente.
Paso 6: Correr con un brazo en ángulo
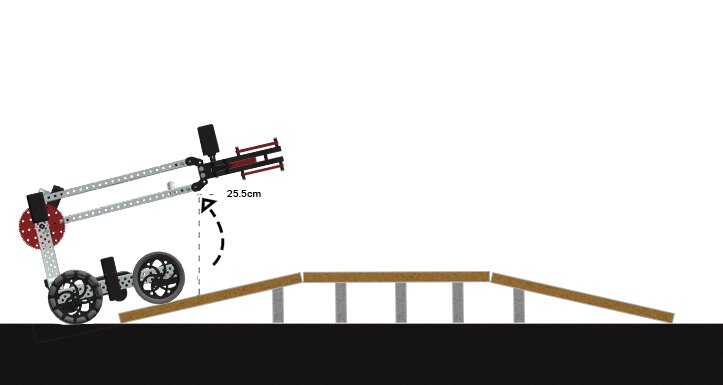
Durante la segunda ronda, las nuevas parejas volverán a competir cara a cara con sus Clawbots.
En esta ronda, el brazo de cada Clawbot debe levantarse al menos 25,5 centímetros (aprox. 10 pulgadas) por encima de su posición inicial.
![]() Consejos para profesores
Consejos para profesores
-
Compruebe la posición de cada brazo antes de cada carrera para asegurarse de que el brazo esté correctamente posicionado.
-
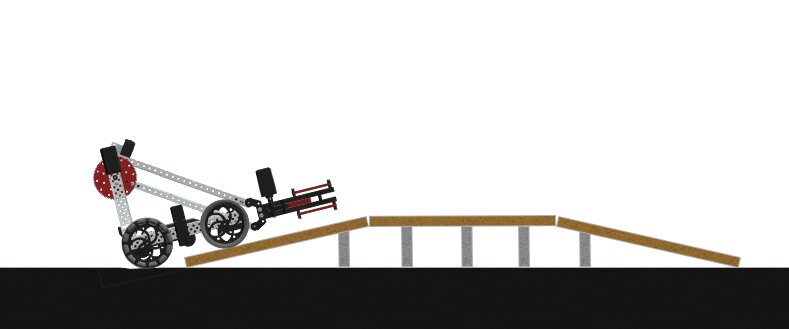
Notifique a los estudiantes que el V5 Clawbot es propenso a inclinarse cuando se levanta el brazo de la garra (especialmente si el brazo está levantado y la garra sostiene un objeto).
Paso 7: Correr con un brazo casi vertical
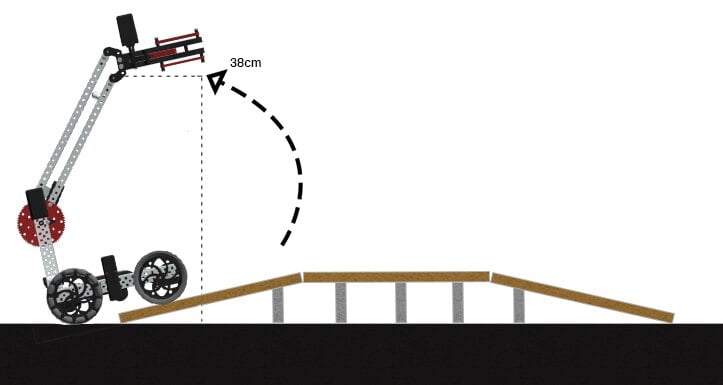
Durante la tercera ronda, los brazos de los V5 Clawbots deben elevarse 38 centímetros (aprox. 15 pulgadas) por encima de su posición inicial.
Si solo tienes dos equipos, el equipo que gane el enfrentamiento de la Ronda 3 es el ganador del desafío.
![]() Consejos para profesores
Consejos para profesores
-
Compruebe la posición de cada brazo antes de cada carrera para asegurarse de que el brazo esté correctamente posicionado.
-
Permita que los ganadores de cada enfrentamiento continúen enfrentándose en otro partido de la Ronda 3, hasta que un equipo surja como el ganador general.
-
Notifique a los estudiantes que el V5 Clawbot es propenso a inclinarse cuando se levanta el brazo de la garra (especialmente si el brazo está levantado y la garra sostiene un objeto).