
Průzkum těžiště s robotem
| Množství | Potřebný materiál |
|---|---|
| 2 |
VEX V5 Classroom Starter Kits (s aktuálním firmwarem) |
| 1 |
Role pásky |
| 1 |
Materiály pro výrobu malé rampy (dřevo, lepenka, pojiva atd.) |
| 1 |
Měřicí tyč |
| 1 |
Technický poznámkový blok |
Krok 1: Vyčištění prostoru
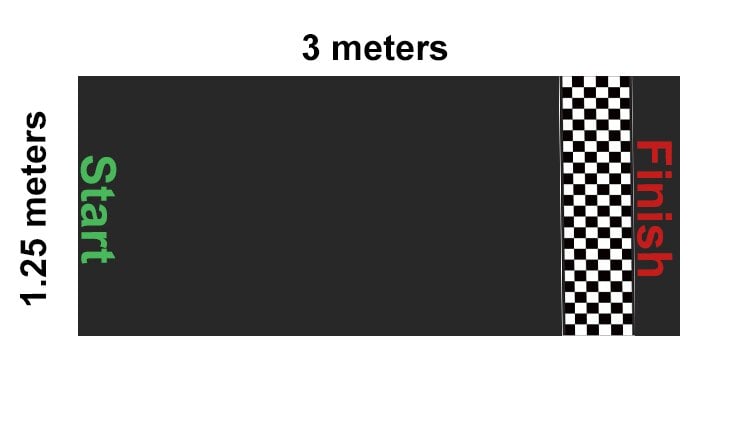 Závodní dráha o rozměrech
Závodní dráha o rozměrech Prvním krokem při vytváření kurzu pro vašeho V5 Clawbota je vyčistit prostor na podlaze přibližně 3 metry (119 palců) o 1,25 metru (49 palců). Toto bude závodní dráha a umožní dvěma Clawbotům závodit bok po boku. Označte prostor páskou nebo nějakým způsobem tak, aby byla dráha zřetelně označena startovními a cílovými čarami.
![]() Tipy pro učitele
Tipy pro učitele
-
Najděte si prostor o rozměrech 3 metry (119 palců) krát 1,25 metru (49 palců). Dráhu a rampu lze zmenšit v případech omezeného prostoru, ale šířka dráhy musí být dostatečně široká, aby se na ni vešly dva V5 Clawboti závodící současně.
-
Podporujte vědomý rozvoj dovedností kooperativního učení tím, že si se studenty projdete tipy ze Strategie a týmové práce (Google / .docx / .pdf).
-
Předem si připravte materiály na stavbu rampy. V sekci hardware/software jsou doporučené materiály, ale postačí cokoli od tříkroužkových pořadačů až po překližku.
Krok 2: Vybudování rampy
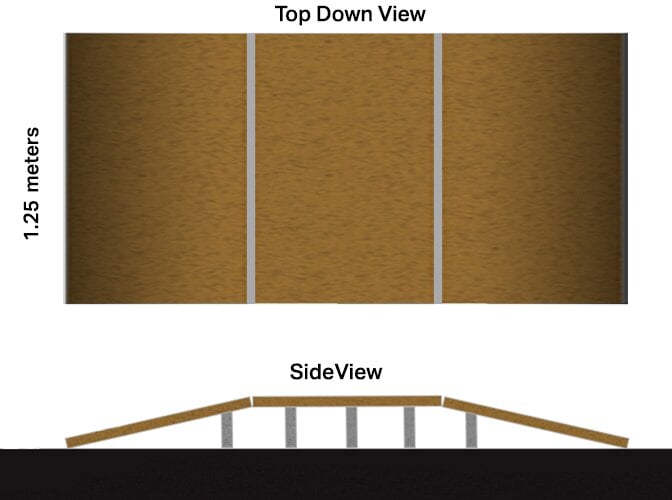 Clawbot
Clawbot Dalším krokem je vybudování rampy, která je stejně široká jako hřiště (přibližně 1,25 metru). Rampa může být vyrobena ze dřeva, lepenky nebo čehokoli, co je dostatečně pevné, aby uneslo váhu obou Clawbotů V5. Rampa by měla mít dva svahy, nejprve nahoru a pak dolů, a měla by být postupně skloněna tak, aby na obou koncích nebyly mezery.
Krok 3: Umístění rampy
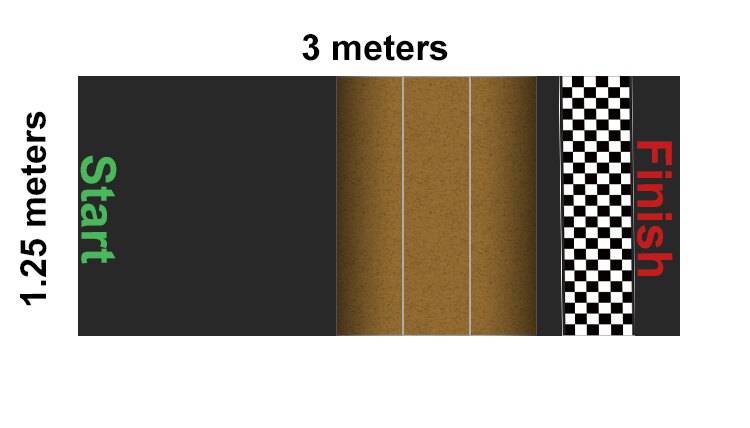
Přesuňte rampu do druhé poloviny kurzu. Rampa by měla být nejméně 1,5 metru od startovní čáry. Ujistěte se, že je rampa umístěna tak, aby její strany byly přesně rovnoběžné se stranami dráhy. Jinými slovy, ujistěte se, že rampa není křivá, aby přední kola V5 Clawbot mohla dosáhnout rampy přesně ve stejnou dobu.
Krok 4: Příprava robota

Zapněte robota V5 Robot Brain, ujistěte se, že je spárován s ovladačemController, a spusťte naabyste mohli robota bezdrátově řídit pomocí ovladače V5 Controller.
Krok 5: Běh s klidovou paží
Clawboty V5 by měly mít paže úplně dole ve výchozí nebo klidové poloze.
![]() Tipy pro učitele
Tipy pro učitele
-
Zkontrolujte, zda je rameno každého robota V5 Clawbot spuštěno do výchozí nebo klidové polohy.
-
Rozdělte týmy do dvojic. Během prvního kola bude každá dvojice závodit s V5 Clawboty proti sobě.
-
Pokud je lichý počet týmů, použijte systém každý s každým.
-
Pokud máte čtyři nebo více týmů, po každém kole střídejte dvojice. Zajistěte, aby se v dalším kole utkaly dva nejrychlejší týmy, poté další dva nejrychlejší a tak dále.
Krok 6: Běh se šikmým ramenem
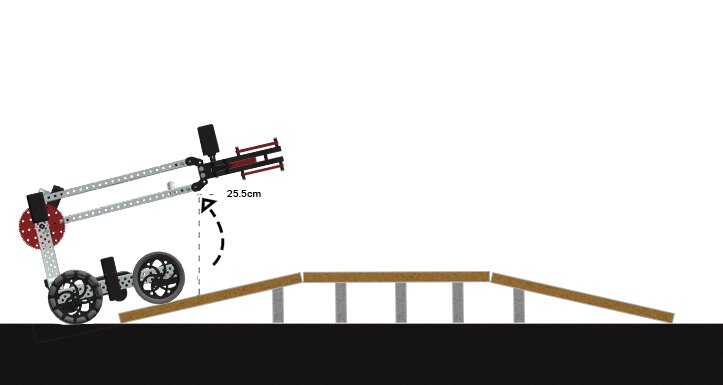
Během druhého kola budou nové dvojice opět závodit se svými Clawboty přímo proti sobě.
V tomto kole musí být paže každého Clawbota zvednuta alespoň 25,5 centimetru (přibližně 10 palců) nad svou výchozí pozicí.
![]() Tipy pro učitele
Tipy pro učitele
-
Před každým závodem zkontrolujte polohu každé paže, abyste se ujistili, že je ve správné poloze.
-
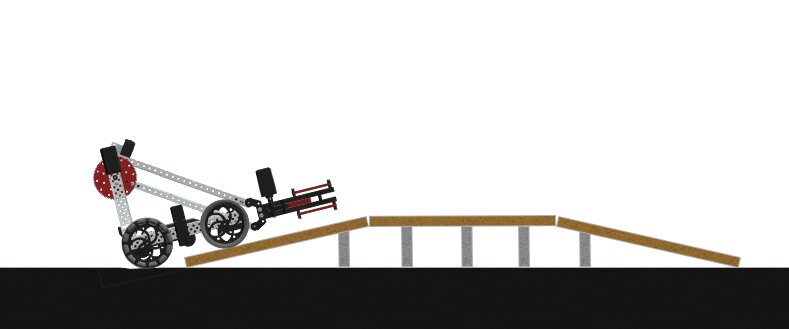
Upozorněte studenty, že robot V5 Clawbot má tendenci se převrhnout, když je rameno s drápem zvednuto (zejména pokud je rameno zvednuto a dráp drží nějaký předmět).
Krok 7: Běh s téměř svislým ramenem
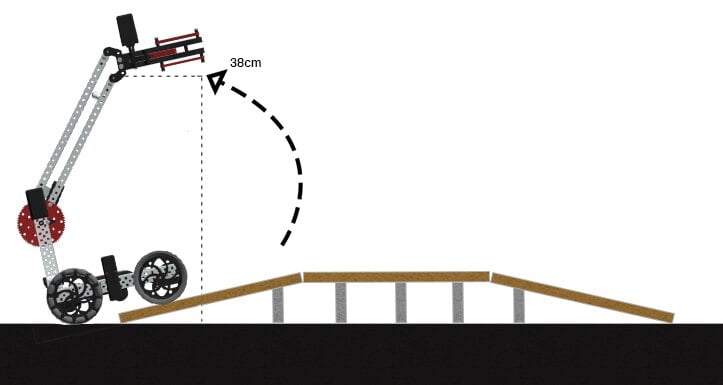
Během třetího kola musí být paže drápů V5 zvednuty 38 centimetrů (přibližně 15 palců) nad jejich výchozí pozicí.
Pokud máte pouze dva týmy, vítězem výzvy je tým, který vyhraje zápas ve 3. kole.
![]() Tipy pro učitele
Tipy pro učitele
-
Před každým závodem zkontrolujte polohu každé paže, abyste se ujistili, že je ve správné poloze.
-
Nechte vítěze každého zápasu pokračovat v dalším zápase 3. kola, dokud se jeden tým nestane celkovým vítězem.
-
Upozorněte studenty, že robot V5 Clawbot má tendenci se převrhnout, když je rameno s drápem zvednuto (zejména pokud je rameno zvednuto a dráp drží nějaký předmět).