
| Quantità | Materiali necessari |
|---|---|
| 2 |
Starter Kit VEX V5 Classroom (con firmware aggiornato) |
| 1 |
Rotolo di nastro adesivo |
| 1 |
Materiali per realizzare una Rampa Piccola (legno, cartone, leganti, ecc.) |
| 1 |
Bastone del contatore |
| 1 |
Taccuino tecnico |
Passaggio 1: liberare uno spazio
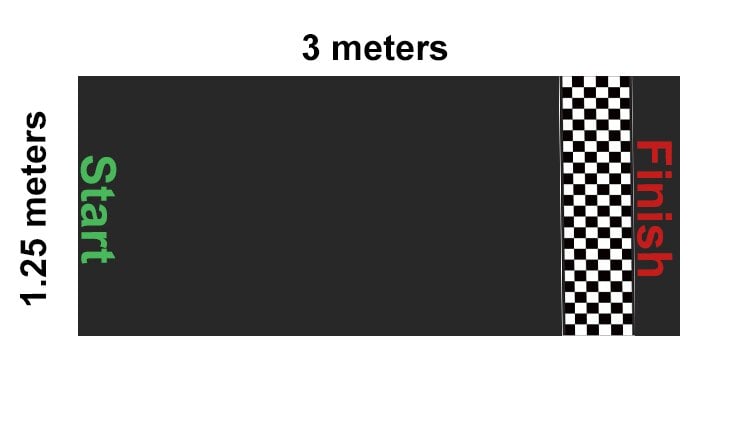 Pista da corsa di
Pista da corsa di Il primo passo per creare un percorso per il tuo Clawbot V5 è liberare uno spazio sul pavimento di circa 3 metri (119 pollici) per 1,25 metri (49 pollici). Questa sarà la pista da corsa e consentirà a due Clawbot di gareggiare fianco a fianco contemporaneamente. Contrassegnare lo spazio con nastro adesivo o in qualche modo in modo che la traccia sia chiaramente contrassegnata con linee di partenza e di arrivo.
![]() Suggerimenti per l'insegnante
Suggerimenti per l'insegnante
-
Individua uno spazio di 3 metri (119 pollici) per 1,25 metri (49 pollici). La pista e la rampa possono essere ridimensionate nei casi in cui lo spazio è limitato, ma la larghezza della pista deve essere abbastanza ampia da ospitare due Clawbot V5 da corsa contemporaneamente.
-
Promuovere lo sviluppo consapevole delle capacità di apprendimento cooperativo rivedendo i suggerimenti di Strategia e Lavoro di squadra (Google / .docx / .pdf) con gli studenti.
-
Raccogli in anticipo i materiali per costruire la rampa. Ci sono materiali consigliati nella sezione hardware/software, ma sarà sufficiente qualsiasi cosa, dai leganti a tre anelli al compensato.
Passaggio 2: costruire una rampa
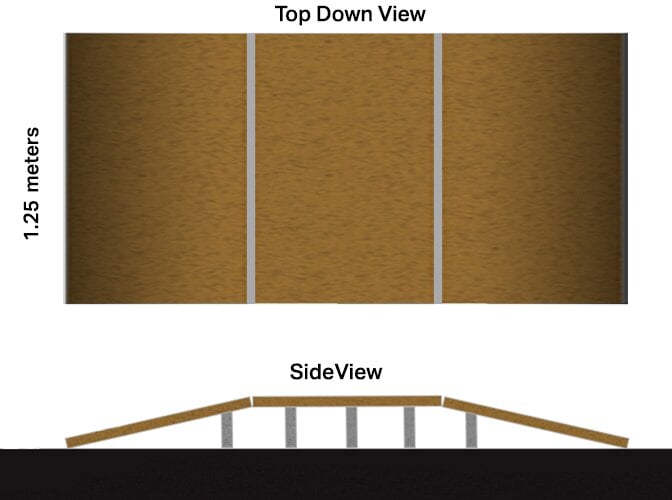
Il passo successivo è costruire una rampa larga quanto il percorso (circa 1,25 metri). La rampa potrebbe essere costruita utilizzando legno, cartone o qualsiasi altra cosa disponibile abbastanza forte da sostenere il peso dei due Clawbots V5. La rampa dovrebbe avere due pendenze, prima verso l'alto e poi verso il basso, e dovrebbe essere inclinata gradualmente in modo che non ci siano spazi vuoti alle due estremità.
Fase 3: Posizionamento della rampa
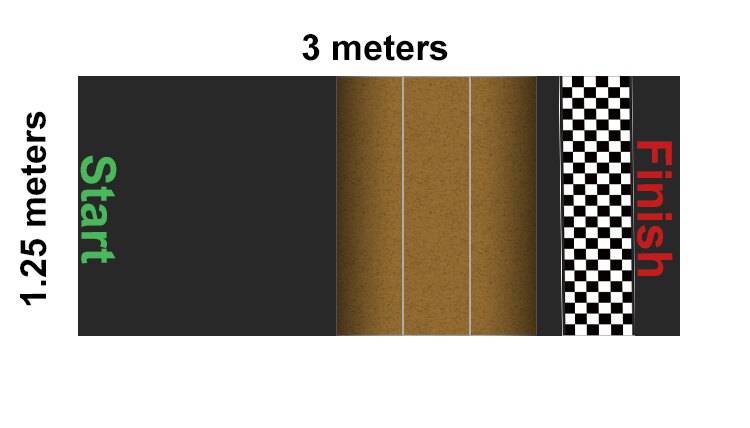 autodromo
autodromo Sposta la rampa nella seconda metà del percorso. La rampa deve essere ad almeno 1,5 metri (59 pollici) dalla linea di partenza. Assicurarsi che la rampa sia posizionata in modo che i suoi lati siano esattamente paralleli ai lati del binario. In altre parole, assicurarsi che la rampa non sia storta in modo che le ruote anteriori del V5 Clawbot possano raggiungere la rampa esattamente nello stesso momento.
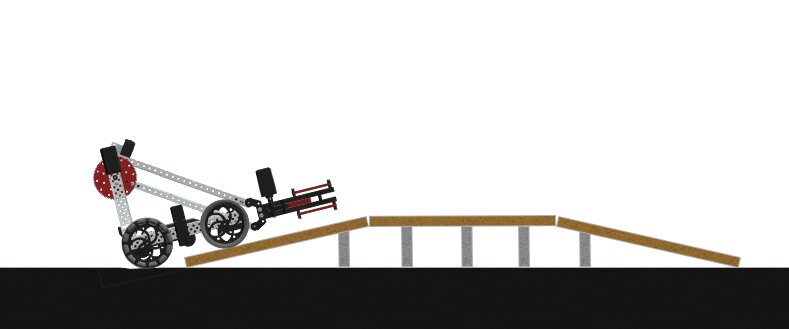
Passaggio 4: preparazione del robot

Accendere il cervello del robot V5, assicurarsi che sia abbinato al controller V5 edeseguire il programma Drive sul cervello del robot V5 in modo da poter guidare il robot in modalità wireless con il controller V5.
Passaggio 5: Correre con un braccio a riposo
I Clawbots V5 dovrebbero avere le braccia completamente abbassate nella posizione di partenza o di riposo.
![]() Suggerimenti per l'insegnante
Suggerimenti per l'insegnante
-
Verificare che il braccio di ogni Clawbot V5 sia abbassato in posizione di partenza o di riposo.
-
Raggruppa le squadre in coppie. Durante il primo turno, ogni coppia sfiderà i V5 Clawbots l'uno contro l'altro.
-
Utilizzare una staffa round robin se c'è un numero dispari di squadre.
-
Ruota le coppie dopo ogni turno, se hai quattro o più squadre. Assicurati che le due squadre più veloci si affrontino nel turno successivo, poi le due successive più veloci e così via.
Passaggio 6: Correre con un braccio angolato
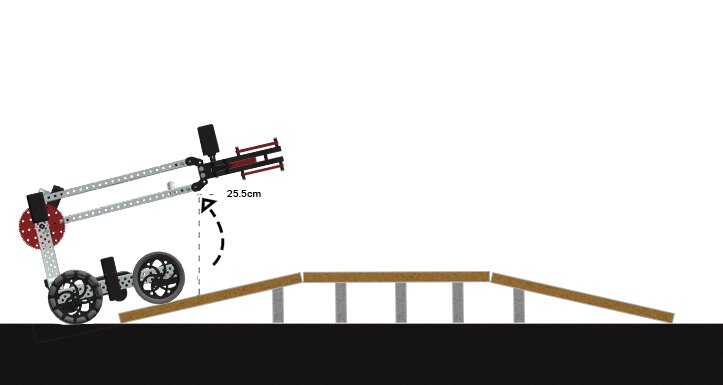
Durante il secondo turno, le nuove coppie gareggeranno di nuovo testa a testa con i loro Clawbot.
In questo round, il braccio di ogni Clawbot deve essere sollevato di almeno 25,5 centimetri (circa 10 pollici) sopra la sua posizione di partenza.
![]() Suggerimenti per l'insegnante
Suggerimenti per l'insegnante
-
Controllare la posizione di ciascun braccio prima di ogni corsa per assicurarsi che il braccio sia posizionato correttamente.
-
Informare gli studenti che il Clawbot V5 è incline a ribaltarsi quando il braccio dell'artiglio viene sollevato (specialmente se il braccio è sollevato e l'artiglio tiene un oggetto).
Passo 7: Correre con un braccio quasi verticale
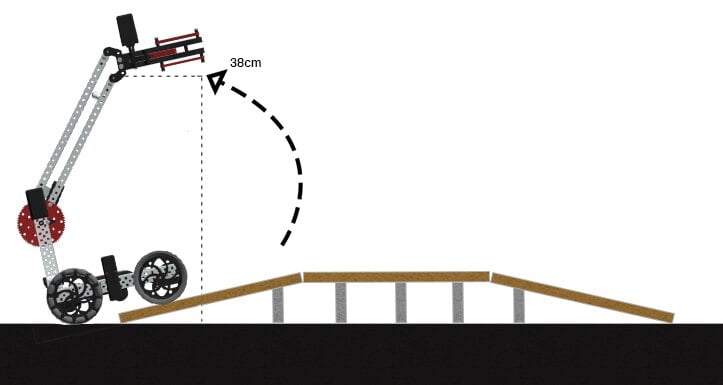
Durante il terzo round, le braccia dei Clawbots V5 devono essere sollevate di 38 centimetri (circa 15 pollici) rispetto alla posizione di partenza.
Se hai solo due squadre, la squadra che vince il round 3 è la vincitrice della sfida.
![]() Suggerimenti per l'insegnante
Suggerimenti per l'insegnante
-
Controllare la posizione di ciascun braccio prima di ogni corsa per assicurarsi che il braccio sia posizionato correttamente.
-
Consenti ai vincitori di ogni incontro di continuare a scontrarsi in un'altra partita del 3° turno, fino a quando una squadra non emerge come vincitrice assoluta.
-
Informare gli studenti che il Clawbot V5 è incline a ribaltarsi quando il braccio dell'artiglio viene sollevato (specialmente se il braccio è sollevato e l'artiglio tiene un oggetto).