
로봇으로 중심점 탐색
| 수량 | 필요한 재료 |
|---|---|
| 2 |
VEX V5 클래스룸 스타터 키트 (최신 펌웨어 포함) |
| 1 |
테이프 롤 |
| 1 |
소형 경사로를 만들기 위한 재료 (목재, 판지, 바인더 등) |
| 1 |
미터 스틱 |
| 1 |
엔지니어링 노트 |
1단계: 스페이스 지우기
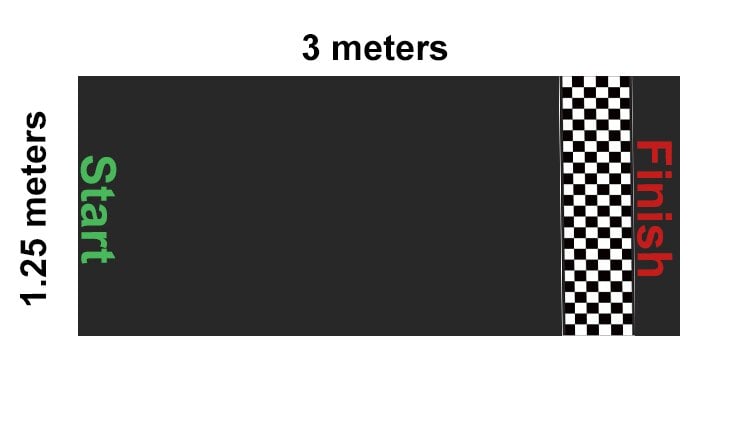 클로 암 챌린지를 위한
클로 암 챌린지를 위한 V5 Clawbot을 위한 코스를 만드는 첫 번째 단계는 약 3미터 (119인치) x 1.25 미터 (49인치) 의 바닥 공간을 비우는 것입니다. 이것은 레이싱 트랙이며 두 개의 Clawbot이 동시에 나란히 경주할 수 있습니다. 트랙에 시작선과 마감선이 선명하게 표시되도록 테이프나 어떤 방식으로든 공간을 표시하세요.
2단계: 경사로 건설하기
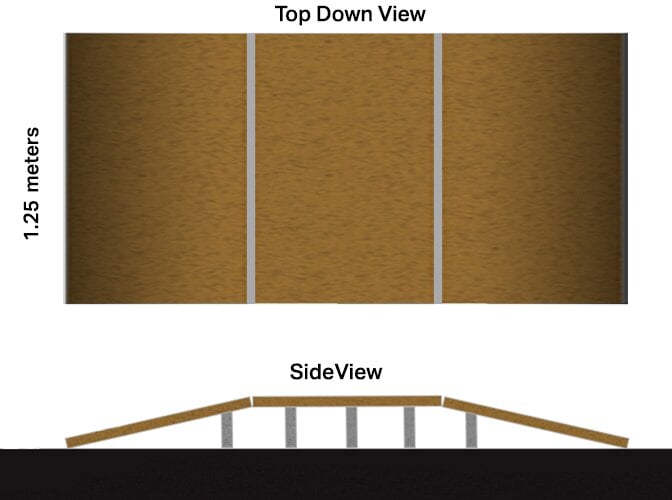 경사로를 따라 올라가는
경사로를 따라 올라가는 다음 단계는 코스 (약 1.25 미터 또는 49 인치) 만큼 넓은 램프를 만드는 것입니다. 램프는 나무, 판지 또는 두 개의 V5 Clawbots의 무게를 지탱할 수 있을 만큼 강한 모든 것을 사용하여 구성할 수 있습니다. 경사로에는 처음에는 위쪽과 아래쪽의 두 개의 경사가 있어야 하며, 양쪽 끝에 틈이 없도록 점진적으로 경사가 이루어져야 합니다.
3단계: 램프 위치 지정
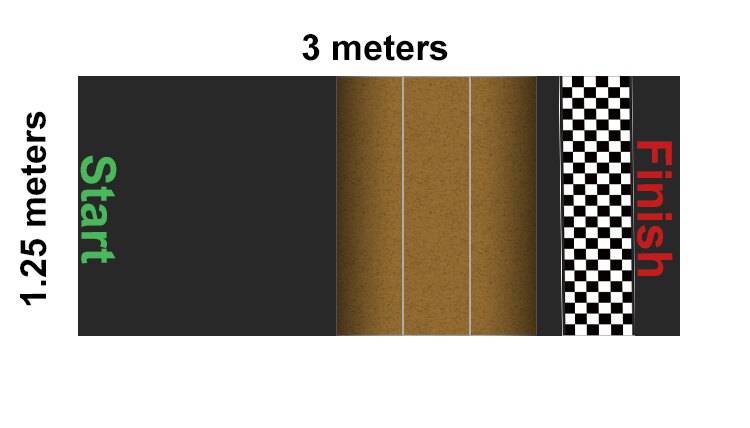 경사로가 있는
경사로가 있는 경사로를 코스의 후반부로 이동합니다. 램프는 출발선에서 1.5미터 (59인치) 이상 떨어져 있어야 합니다. 램프의 측면이 트랙의 측면과 정확하게 평행하도록 램프가 배치되어 있는지 확인하십시오. 즉, V5 Clawbot의 앞바퀴가 정확히 동시에 경사로에 도달할 수 있도록 경사로가 비뚤어지지 않도록 해야 합니다.
4단계: 로봇 준비하기

V5 로봇 브레인의 전원을 켜고,V5 컨트롤러과 페어링되었는지 확인하고, V5 로봇 브레인에서드라이브 프로그램실행하여 V5 컨트롤러로 로봇을 무선으로 구동할 수 있도록 합니다.
5단계: 팔을 쉬게 한 채 달리기
 팔을 쭉 뻗고 코스를 달리는
팔을 쭉 뻗고 코스를 달리는 V5 Clawbots는 시작 또는 휴식 자세에서 팔을 끝까지 내려야 합니다.
![]() 교사 팁
교사 팁
-
각 V5 클로봇의 팔이 시작 위치나 휴식 위치로 내려갔는지 확인하세요.
-
팀을 2명씩 짝지어 구성하세요. 첫 번째 라운드에서는 각 쌍이 V5 클로봇을 이용해 서로 경주를 벌입니다.
-
팀 수가 짝수일 경우 라운드 로빈 브래킷을 활용하세요.
-
팀이 4개 이상인 경우, 라운드가 끝날 때마다 쌍을 바꿉니다. 다음 라운드에서는 가장 빠른 두 팀이 맞붙고, 그 다음으로 빠른 두 팀이 맞붙는 식으로 진행합니다.
6단계: 각진 팔로 달리기
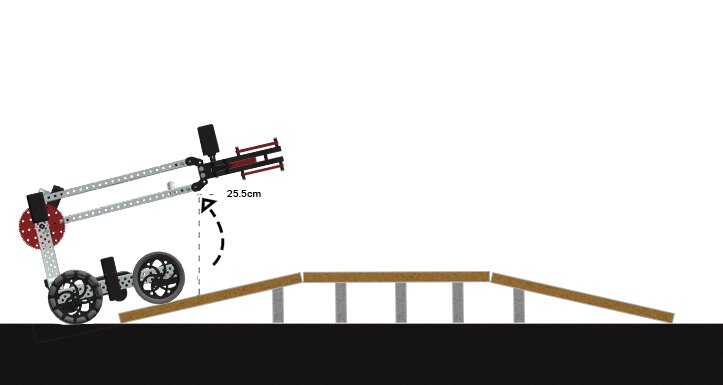
두 번째 라운드에서는 새로운 쌍이 다시 자신의 클로봇을 상대로 정면 대결을 펼칩니다.
이 라운드에서 각 클로봇의 팔은 시작 위치보다 최소 25.5cm(약 10인치) 위로 올라가야 합니다.
![]() 교사 팁
교사 팁
-
각 경기 전에 각 팔의 위치를 확인하여 팔이 제대로 위치했는지 확인하세요.
-
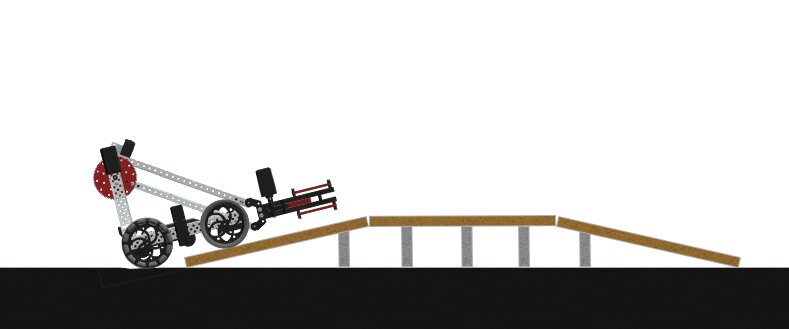
학생들에게 클로우 암을 들어올릴 때(특히 암을 들어올리고 클로우에 물체가 잡혀 있을 때) V5 클로봇이 기울어질 수 있다는 점을 알려줍니다.
7단계: 거의 수직인 암으로 달리기
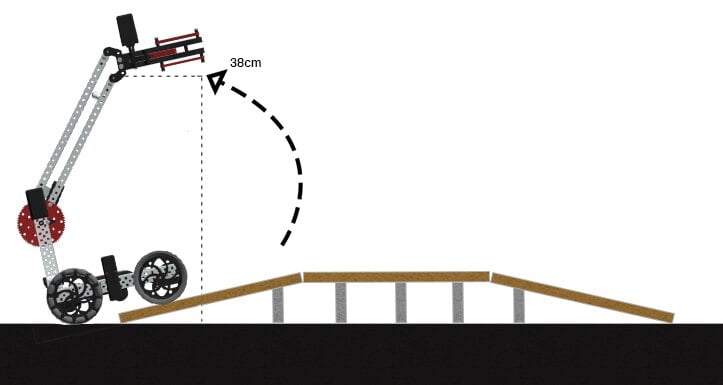 팔을 들어 올린 채 코스를 여행하는
팔을 들어 올린 채 코스를 여행하는 3라운드에서는 V5 클로봇의 팔을 시작 위치보다 38cm(약 15인치) 높이 들어 올려야 합니다.
두 팀만 있는 경우, 3라운드 대결에서 승리하는 팀이 챌린지의 승자가 됩니다.
![]() 교사 팁
교사 팁
-
각 경기 전에 각 팔의 위치를 확인하여 팔이 제대로 위치했는지 확인하세요.
-
각 매치업의 승자가 3라운드 매치에서 다시 맞붙어, 최종 우승팀이 결정될 때까지 계속합니다.
-
학생들에게 클로우 암을 들어올릴 때(특히 암을 들어올리고 클로우에 물체가 잡혀 있을 때) V5 클로봇이 기울어질 수 있다는 점을 알려줍니다.