
| จำนวน | วัสดุที่จำเป็น |
|---|---|
| 2 |
ชุดเริ่มต้นห้องเรียน VEX V5 (พร้อมเฟิร์มแวร์ล่าสุด) |
| 1 |
ม้วนเทป |
| 1 |
วัสดุที่ใช้ทำทางลาดขนาดเล็ก (ไม้กระดาษแข็งสารยึดเกาะฯลฯ) |
| 1 |
แท่งมิเตอร์ |
| 1 |
สมุดบันทึกวิศวกรรม |
ขั้นตอนที่ 1: การเคลียร์พื้นที่
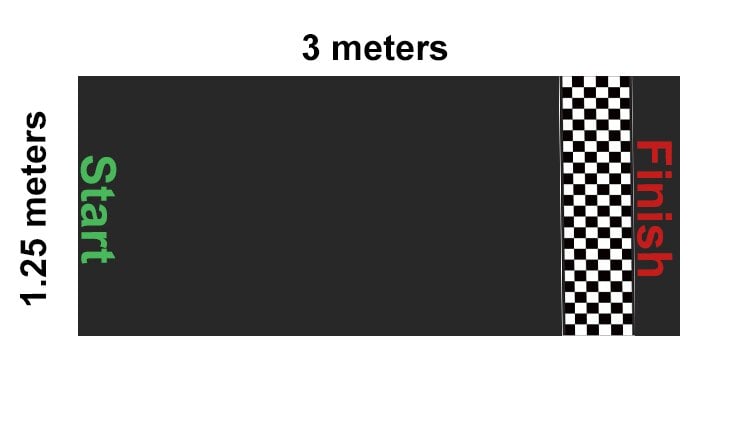 สนามแข่ง
สนามแข่ง ขั้นตอนแรกในการสร้างหลักสูตรสำหรับ V5 Clawbot ของคุณคือการเคลียร์พื้นที่บนพื้นประมาณ 3 เมตร (119 นิ้ว) 1.25 เมตร (49 นิ้ว) นี่จะเป็นสนามแข่งและอนุญาตให้ Clawbots สองตัวแข่งเคียงข้างกันในเวลาเดียวกัน ทำเครื่องหมายพื้นที่ด้วยเทปหรือด้วยวิธีใดวิธีหนึ่งเพื่อให้แทร็กถูกทำเครื่องหมายอย่างชัดเจนด้วยเส้นเริ่มต้นและเส้นชัย
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
-
หาพื้นที่ขนาด 3 เมตร (119 นิ้ว) 1.25 เมตร (49 นิ้ว) แทร็กและทางลาดสามารถปรับขนาดลงได้ในกรณีที่มีพื้นที่จำกัดแต่ความกว้างของแทร็กต้องกว้างพอที่จะรองรับการแข่ง V5 Clawbots สองตัวในเวลาเดียวกัน
-
ส่งเสริมการพัฒนาทักษะการเรียนรู้แบบร่วมมืออย่างมีสติโดยการทบทวนเคล็ดลับกลยุทธ์และการ ทำ งาน เป็นทีม (Google /.docx /.pdf) กับนักเรียน
-
รวบรวมวัสดุสำหรับสร้างทางลาดล่วงหน้า มีวัสดุที่แนะนำในส่วนฮาร์ดแวร์/ซอฟต์แวร์แต่ทุกอย่างตั้งแต่ตัวยึดสามห่วงไปจนถึงไม้อัดก็เพียงพอแล้ว
ขั้นตอนที่ 2: สร้างทางลาด
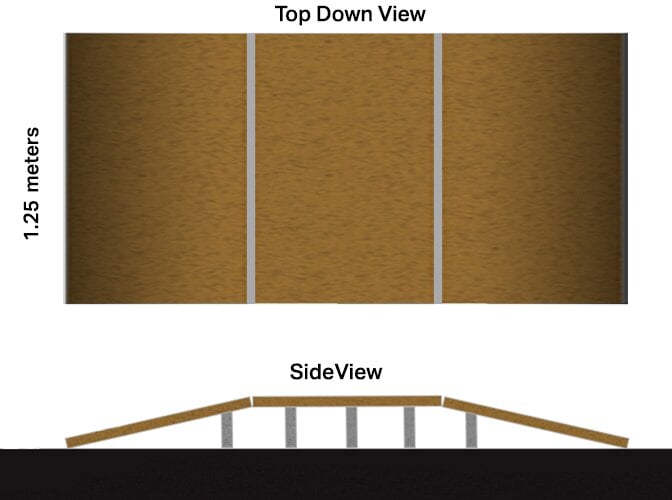
ขั้นตอนต่อไปคือการสร้างทางลาดที่กว้างเท่ากับเส้นทาง (ประมาณ 1.25 เมตรหรือ 49 นิ้ว) ทางลาดสามารถสร้างขึ้นได้โดยใช้ไม้กระดาษแข็งหรืออะไรก็ตามที่มีอยู่ซึ่งแข็งแรงพอที่จะรับน้ำหนักของกรงเล็บ V5 สองอันได้ ทางลาดควรมีความลาดชันสองระดับก่อนขึ้นด้านบนและลงด้านล่างและควรค่อยๆลาดลงเพื่อไม่ให้มีช่องว่างที่ปลายทั้งสองด้าน
ขั้นตอนที่ 3: การวางตำแหน่งทางลาด
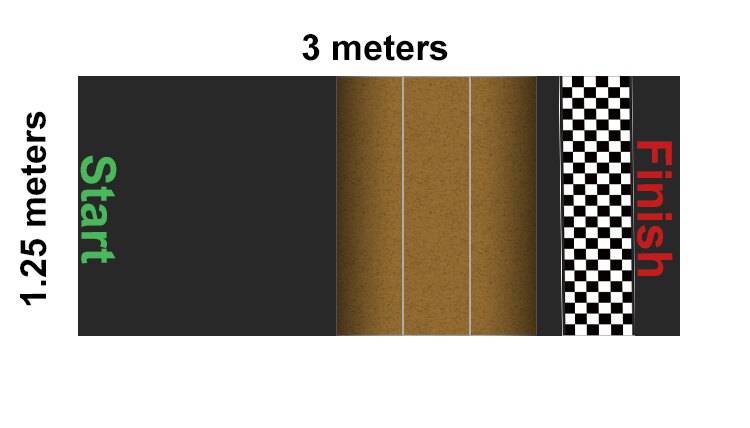 สนามแข่งรถขนาด
สนามแข่งรถขนาด เลื่อนทางลาดไปที่ครึ่งหลังของหลักสูตร ทางลาดควรอยู่ห่างจากเส้นเริ่มต้นอย่างน้อย 1.5 เมตร (59 นิ้ว) ตรวจสอบให้แน่ใจว่าทางลาดอยู่ในตำแหน่งเพื่อให้ด้านข้างขนานกับด้านข้างของแทร็กอย่างแม่นยำ กล่าวอีกนัยหนึ่งตรวจสอบให้แน่ใจว่าทางลาดไม่คดเคี้ยวเพื่อให้ล้อหน้าของ V5 Clawbot สามารถเข้าถึงทางลาดได้ในเวลาเดียวกัน
ขั้นตอนที่ 4: การเตรียมหุ่นยนต์

เปิด V5 Robot Brain ตรวจสอบให้แน่ใจว่าได้จับคู่กับ V5Controller และเรียกใช้โปรแกรม ได รฟ์บน V5 Robot Brain เพื่อให้คุณสามารถขับหุ่นยนต์ของคุณแบบไร้สายด้วย V5 Controller
ขั้นตอนที่ 5: วิ่งโดยใช้แขนพัก
กรงเล็บ V5 ควรวางแขนลงในท่าเริ่มต้นหรือท่าพัก
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
-
ตรวจสอบว่าแขนของ V5 Clawbot แต่ละตัวอยู่ในตำแหน่งเริ่มต้นหรือพัก
-
จัดกลุ่มทีมเป็นคู่ ในช่วงรอบแรกแต่ละคู่จะแข่ง V5 Clawbots กัน
-
ใช้สายการแข่งขัน ROBIN แบบกลมหากมีจำนวนทีมที่ไม่เท่ากัน
-
สลับคู่หลังจากแต่ละรอบหากคุณมีสี่ทีมขึ้นไป ตรวจสอบให้แน่ใจว่าทั้งสองทีมที่เร็วที่สุดเผชิญหน้ากันในรอบถัดไปจากนั้นสองทีมที่เร็วที่สุดถัดไปและอื่นๆ
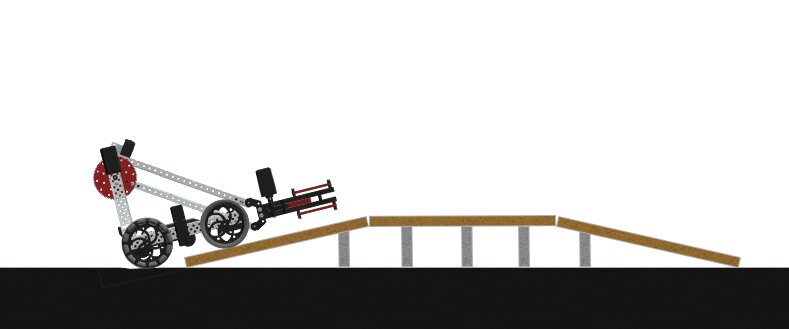
ขั้นตอนที่ 6: วิ่งด้วยแขนที่มีมุม
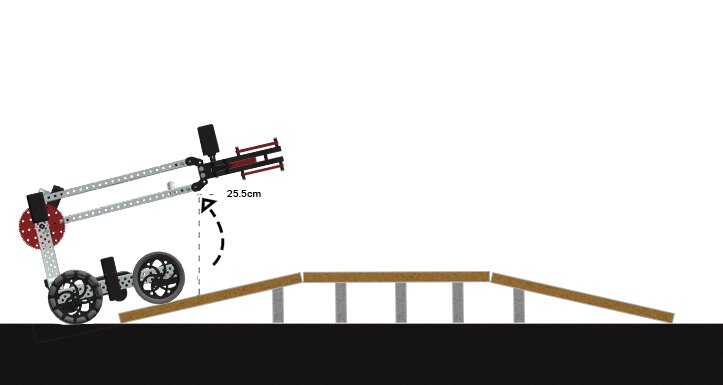
ในช่วงรอบที่สองคู่ใหม่จะแข่ง Clawbots ของพวกเขาอีกครั้งแบบตัวต่อตัว
ในรอบนี้แขนของคลอว์บอตแต่ละตัวจะต้องยกสูงขึ้นอย่างน้อย 25.5 เซนติเมตร (ประมาณ 10 นิ้ว) เหนือตำแหน่งเริ่มต้น
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
-
ตรวจสอบตำแหน่งของแขนแต่ละข้างก่อนการแข่งขันแต่ละครั้งเพื่อให้แน่ใจว่าแขนอยู่ในตำแหน่งที่เหมาะสม
-
แจ้งให้นักเรียนทราบว่ากรงเล็บ V5 มีแนวโน้มที่จะให้ทิปเมื่อยกแขนกรงเล็บขึ้น (โดยเฉพาะอย่างยิ่งถ้ายกแขนขึ้นและกรงเล็บถือวัตถุ)
ขั้นตอนที่ 7: วิ่งด้วยแขนใกล้แนวตั้ง
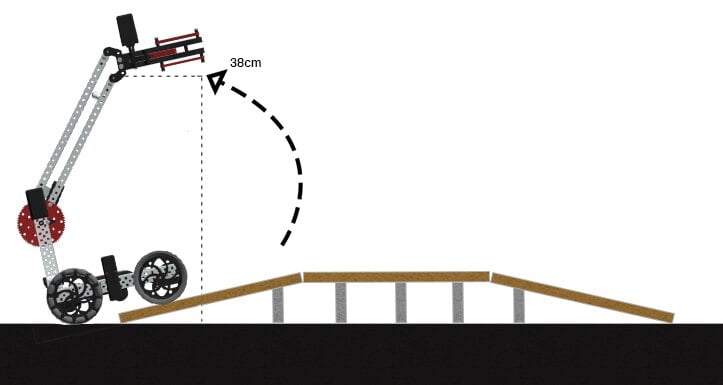
ในระหว่างรอบที่สามแขนของ V5 Clawbots จะต้องยกสูงขึ้น 38 เซนติเมตร (ประมาณ 15 นิ้ว) เหนือตำแหน่งเริ่มต้น
หากคุณมีเพียงสองทีมทีมที่ชนะการแข่งขันรอบที่ 3 จะเป็นผู้ชนะการแข่งขัน
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
-
ตรวจสอบตำแหน่งของแขนแต่ละข้างก่อนการแข่งขันแต่ละครั้งเพื่อให้แน่ใจว่าแขนอยู่ในตำแหน่งที่เหมาะสม
-
อนุญาตให้ผู้ชนะของแต่ละแมตช์ยังคงเผชิญหน้ากันต่อไปในอีกรอบที่ 3 จนกว่าจะมีทีมใดทีมหนึ่งปรากฏตัวเป็นผู้ชนะโดยรวม
-
แจ้งให้นักเรียนทราบว่ากรงเล็บ V5 มีแนวโน้มที่จะให้ทิปเมื่อยกแขนกรงเล็บขึ้น (โดยเฉพาะอย่างยิ่งถ้ายกแขนขึ้นและกรงเล็บถือวัตถุ)