
| Menge | Benötigtes Material |
|---|---|
| 2 |
VEX V5 Classroom Starter Kits (mit aktueller Firmware) |
| 1 |
Rolle Klebeband |
| 1 |
Materialien zur Herstellung einer kleinen Rampe (Holz, Pappe, Bindemittel usw.) |
| 1 |
Zählerstab |
| 1 |
Technisches Notizbuch |
Schritt 1: Räumung einer Unterkunft
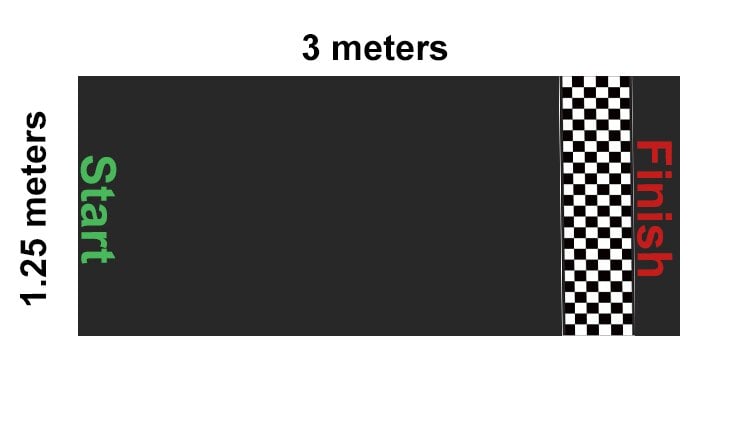
Der erste Schritt bei der Erstellung eines Kurses für Ihren V5 Clawbot besteht darin, einen Raum auf dem Boden von etwa 3 Metern (119 Zoll) mal 1,25 Metern (49 Zoll) zu räumen. Dies wird die Rennstrecke sein und es zwei Clawbots ermöglichen, gleichzeitig nebeneinander zu fahren. Markieren Sie den Raum mit Klebeband oder in irgendeiner Weise, so dass die Spur deutlich mit Start- und Ziellinien markiert ist.
![]() Lehrertipps
Lehrertipps
-
Suchen Sie einen Raum, der 3 Meter (119 Zoll) mal 1,25 Meter (49 Zoll) groß ist. Die Strecke und die Rampe können in Fällen, in denen es wenig Platz gibt, verkleinert werden, aber die Breite der Strecke muss breit genug sein, um zwei V5 Clawbots gleichzeitig aufnehmen zu können.
-
Fördern Sie die bewusste Entwicklung kooperativer Lernfähigkeiten, indem Sie die Strategie- und Teamwork-Tipps (Google / .docx / .pdf) mit den Schülern durchgehen.
-
Sammeln Sie im Voraus Materialien für den Bau der Rampe. Es gibt empfohlene Materialien im Bereich Hardware/Software, aber alles von Drei-Ring-Bindern bis hin zu Sperrholz reicht aus.
Schritt 2: Bau einer Rampe
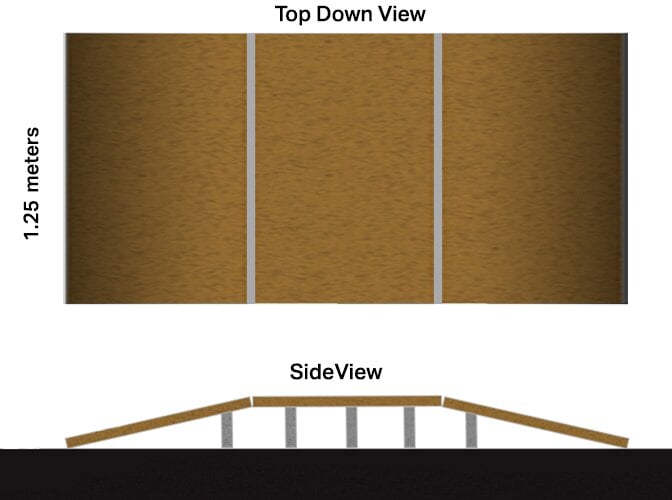
Der nächste Schritt besteht darin, eine Rampe zu bauen, die so breit ist wie der Platz (ca. 1,25 Meter oder 49 Zoll). Die Rampe könnte aus Holz, Pappe oder allem anderen gebaut werden, das stark genug ist, um das Gewicht der beiden V5 Clawbots zu tragen. Die Rampe sollte zwei Neigungen haben, zuerst nach oben und dann nach unten, und sollte allmählich geneigt sein, damit es an beiden Enden keine Lücken gibt.
Schritt 3: Positionierung der Rampe
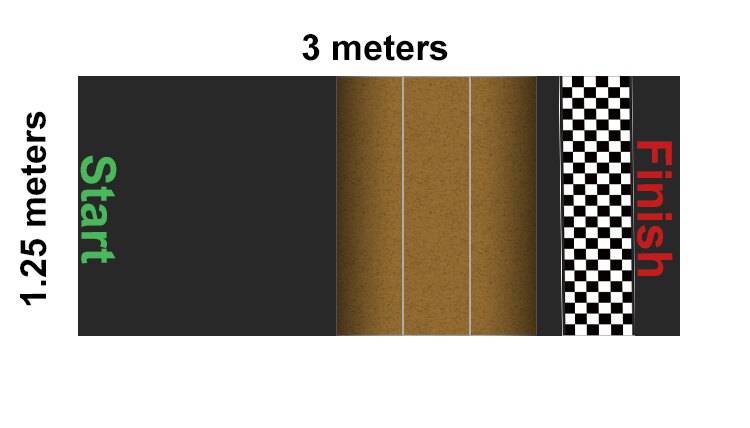
Bewegen Sie die Rampe in die zweite Hälfte des Kurses. Die Rampe sollte mindestens 1,5 Meter (59 Zoll) von der Startlinie entfernt sein. Stellen Sie sicher, dass die Rampe so positioniert ist, dass ihre Seiten genau parallel zu den Seiten der Schiene sind. Mit anderen Worten, stellen Sie sicher, dass die Rampe nicht gekrümmt ist, damit die Vorderräder des V5 Clawbot genau zur gleichen Zeit die Rampe erreichen können.
Schritt 4: Roboter vorbereiten

Schalten Sie das V5-Roboter-Gehirn ein, stellen Sie sicher, dass es mit dem V5-Controller gekoppelt ist, und führen Sie das Fahrprogramm auf dem V5-Roboter-Gehirn aus, damit Sie Ihren Roboter mit dem V5-Controller drahtlos fahren können.
Schritt 5: Laufen mit einem Ruhearm
Die V5 Clawbots sollten ihre Arme in der Start- oder Ruheposition ganz nach unten halten.
![]() Lehrertipps
Lehrertipps
-
Überprüfen Sie, ob der Arm jedes V5-Clawbots in die Start- oder Ruheposition abgesenkt ist.
-
Teams zu Paaren gruppieren. Während der ersten Runde wird jedes Paar die V5-Clawbots gegeneinander antreten lassen.
-
Verwenden Sie eine Round-Robin-Klammer, wenn es eine ungerade Anzahl von Teams gibt.
-
Drehen Sie die Paare nach jeder Runde, wenn Sie vier oder mehr Teams haben. StellenSie sicher, dass die beiden schnellsten Teams in der nächsten Runde gegeneinander antreten, dann die beiden nächsten am schnellsten und so weiter.
Schritt 6: Laufen mit einem abgewinkelten Arm
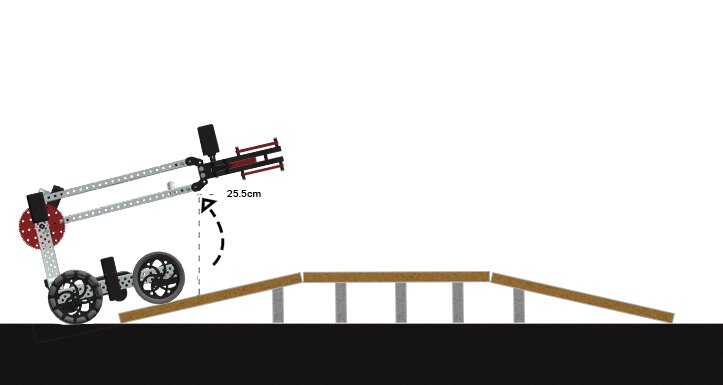
In der zweiten Runde treten die neuen Paare wieder gegeneinander an.
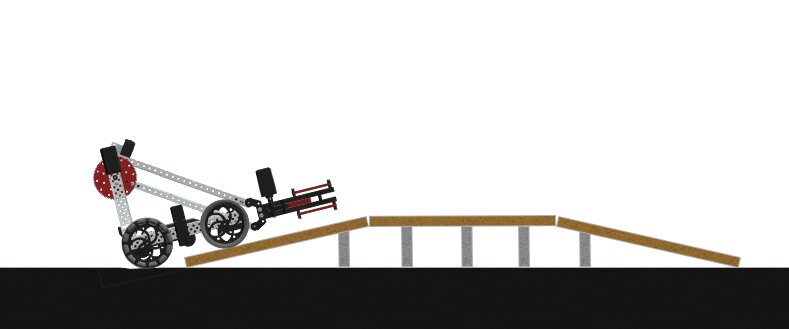
In dieser Runde muss der Arm jedes Clawbots mindestens 25,5 Zentimeter (ca. 10 Zoll) über seine Ausgangsposition angehoben werden.
![]() Lehrertipps
Lehrertipps
-
Überprüfen Sie die Position jedes Arms vor jedem Lauf, um sicherzustellen, dass der Arm richtig positioniert ist.
-
Benachrichtigen Sie die Schüler, dass der V5-Clawbot beim Anheben des Klauenarms zum Kippen neigt (insbesondere, wenn der Arm angehoben ist und die Klaue einen Gegenstand hält).
Schritt 7: Laufen mit einem nahezu vertikalen Arm
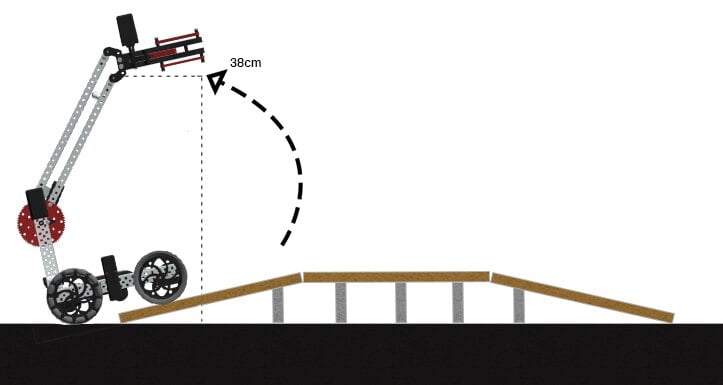
Während der dritten Runde müssen die Arme der V5 Clawbots 38 Zentimeter (ca. 15 Zoll) über ihre Ausgangsposition angehoben werden.
Wenn Sie nur zwei Teams haben, ist das Team, das das Matchup von Runde 3 gewinnt, der Gewinner der Herausforderung.
![]() Lehrertipps
Lehrertipps
-
Überprüfen Sie die Position jedes Arms vor jedem Lauf, um sicherzustellen, dass der Arm richtig positioniert ist.
-
Erlauben Sie den Gewinnern jedes Spiels, sich in einem weiteren Spiel der dritten Runde weiter zu messen, bis ein Team als Gesamtsieger hervorgeht.
-
Benachrichtigen Sie die Schüler, dass der V5-Clawbot beim Anheben des Klauenarms zum Kippen neigt (insbesondere, wenn der Arm angehoben ist und die Klaue einen Gegenstand hält).