
| Quantité | Matériel nécessaire |
|---|---|
| 2 |
Kits de démarrage pour salle de classe VEX V5 (avec micrologiciel à jour) |
| 1 |
Rouleau de ruban adhésif |
| 1 |
Matériaux pour fabriquer une petite rampe (bois, carton, liants, etc.) |
| 1 |
Bâton de compteur |
| 1 |
Carnet d'ingénierie |
Étape 1 : libérer un espace
 Piste de course de
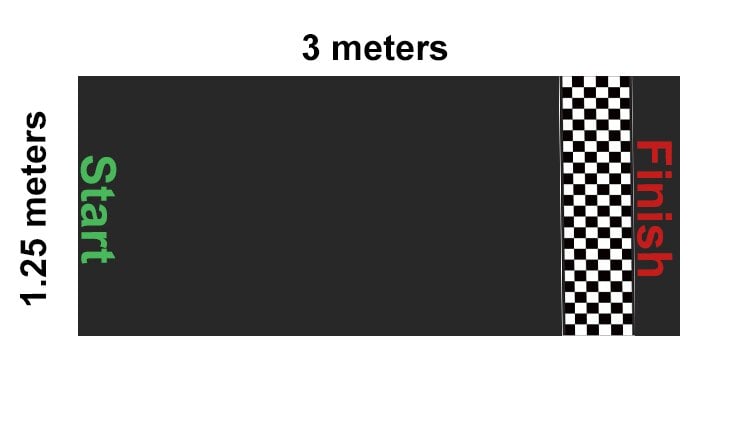
Piste de course de La première étape dans la création d'un parcours pour votre V5 Clawbot est de dégager un espace sur le sol d'environ 3 mètres (119 pouces) par 1,25 mètre (49 pouces). Ce sera la piste de course et permettra à deux Clawbots de courir côte à côte en même temps. Marquez l'espace avec du ruban adhésif ou d'une manière ou d'une autre afin que la piste soit clairement marquée avec des lignes de départ et d'arrivée.
![]() Conseils à l'enseignant
Conseils à l'enseignant
-
Localisez un espace de 3 mètres (119 pouces) sur 1,25 mètre (49 pouces). La piste et la rampe peuvent être réduites dans les cas où l'espace est limité, mais la largeur de la piste doit être suffisamment large pour accueillir deux V5 Clawbots qui courent en même temps.
-
Promouvoir le développement conscient des compétences d'apprentissage coopératif en passant en revue les conseils sur la stratégie et le travail d'équipe (Google / .docx / .pdf) avec les étudiants.
-
Rassemblez à l'avance les matériaux nécessaires à la construction de la rampe. Il y a des matériaux recommandés dans la section matériel/logiciel, mais tout, des liants à trois anneaux au contreplaqué, suffira.
Étape 2 : Construire une rampe
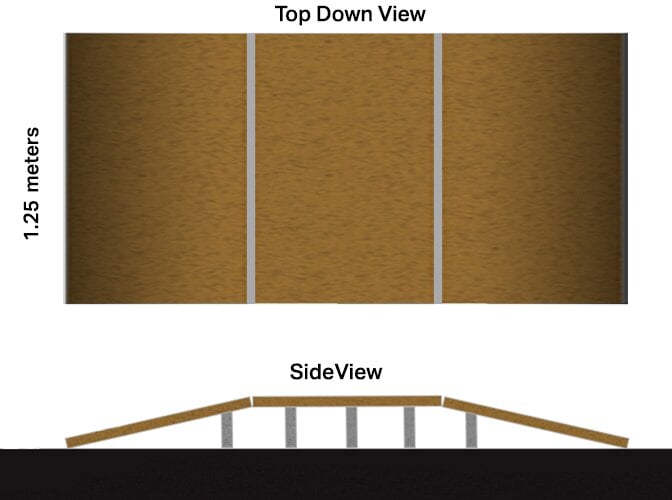
L'étape suivante consiste à construire une rampe aussi large que le parcours (environ 1,25 mètre). La rampe pourrait être construite en bois, en carton ou en tout autre matériau suffisamment solide pour supporter le poids des deux V5 Clawbots. La rampe devrait avoir deux pentes, d'abord vers le haut, puis vers le bas, et devrait être inclinée progressivement afin qu'il n'y ait pas de lacunes à chaque extrémité.
Étape 3 : Positionnement de la rampe
 Piste de course de
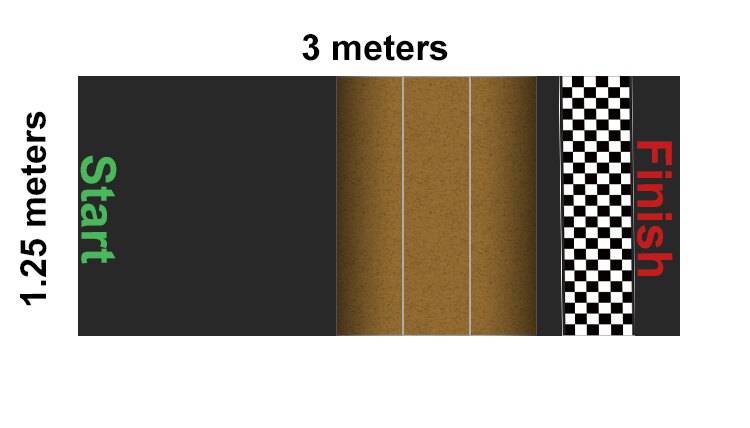
Piste de course de Déplacez la rampe vers la deuxième moitié du parcours. La rampe doit être à au moins 1,5 mètre (59 pouces) de la ligne de départ. Assurez-vous que la rampe est positionnée de manière à ce que ses côtés soient exactement parallèles aux côtés de la voie. En d'autres termes, assurez-vous que la rampe n'est pas tordue afin que les roues avant du V5 Clawbot puissent atteindre la rampe exactement au même moment.
Étape 4 : Préparation du robot

Allumez le V5 Robot Brain, assurez-vous qu'il est couplé au contrôleur V5et exécutez le programme Drive sur le V5 Robot Brain afin de pouvoir conduire votre robot sans fil avec le contrôleur V5.
Étape 5 : Courir avec un bras de repos
Les Clawbots V5 doivent avoir leurs bras complètement vers le bas en position de départ ou de repos.
![]() Conseils à l'enseignant
Conseils à l'enseignant
-
Vérifiez que le bras de chaque V5 Clawbot est abaissé en position de départ ou de repos.
-
Regroupez les équipes par paires. Au cours du premier tour, chaque paire affrontera les V5 Clawbots les uns contre les autres.
-
Utilisez un support de tournoi à la ronde s'il y a un nombre impair d'équipes.
-
Faites pivoter les paires après chaque tour, si vous avez quatre équipes ou plus. Assurez-vous que les deux équipes les plus rapides s'affrontent au tour suivant, puis les deux suivantes les plus rapides, et ainsi de suite.
Étape 6 : Courir avec un bras coudé
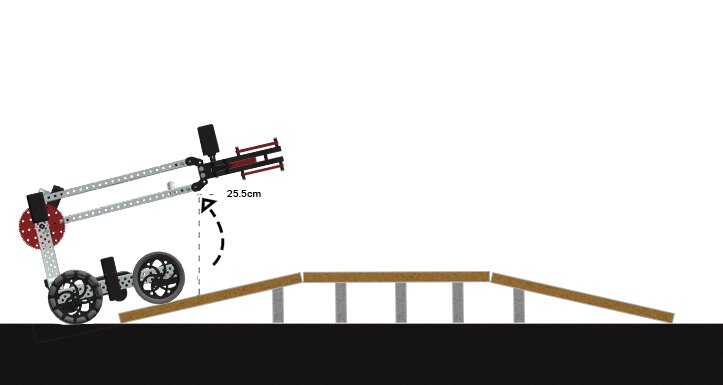
Au cours du deuxième tour, les nouvelles paires affronteront à nouveau leurs Clawbots.
Dans ce tour, le bras de chaque Clawbot doit être soulevé d'au moins 25,5 centimètres (environ 10 pouces) au-dessus de sa position de départ.
![]() Conseils à l'enseignant
Conseils à l'enseignant
-
Vérifiez la position de chaque bras avant chaque course pour vous assurer que le bras est correctement positionné.
-
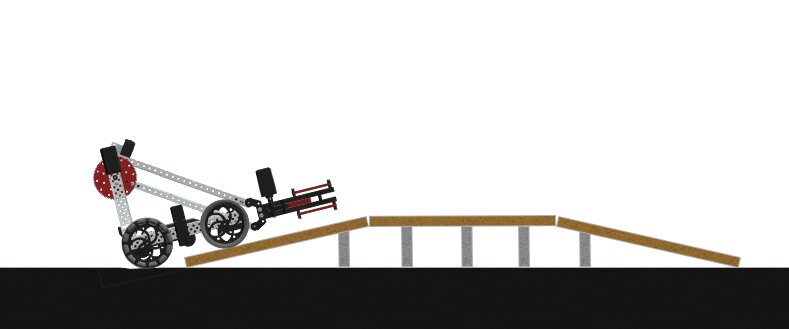
Informez les élèves que le V5 Clawbot est susceptible de basculer lorsque le bras de la griffe est levé (surtout si le bras est levé et que la griffe tient un objet).
Étape 7 : Courir avec un bras presque vertical
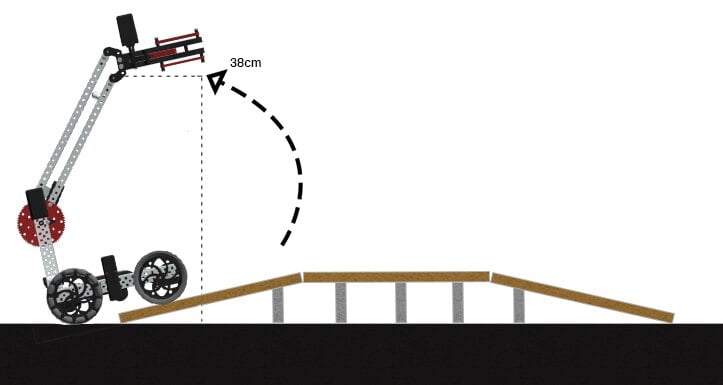
Au cours du troisième tour, les bras des V5 Clawbots doivent être relevés de 38 centimètres (environ 15 pouces) au-dessus de leur position de départ.
Si vous n'avez que deux équipes, l'équipe qui remporte le match de la ronde 3 est la gagnante du défi.
![]() Conseils à l'enseignant
Conseils à l'enseignant
-
Vérifiez la position de chaque bras avant chaque course pour vous assurer que le bras est correctement positionné.
-
Permettez aux vainqueurs de chaque match de continuer à s'affronter lors d'un autre match de la ronde 3, jusqu'à ce qu'une équipe émerge en tant que vainqueur global.
-
Informez les élèves que le V5 Clawbot est susceptible de basculer lorsque le bras de la griffe est levé (surtout si le bras est levé et que la griffe tient un objet).