
Khám phá trọng tâm với Robot
| Số lượng | Vật liệu cần thiết |
|---|---|
| 2 |
VEX V5 Classroom Starter Kits (với firmware cập nhật) |
| 1 |
Cuộn băng |
| 1 |
Vật liệu để tạo ra một đường dốc nhỏ (gỗ, bìa cứng, chất kết dính, v.v.) |
| 1 |
Gậy đo |
| 1 |
Sổ tay kỹ thuật |
Bước 1: Dọn dẹp chỗ trống
 Đường đua
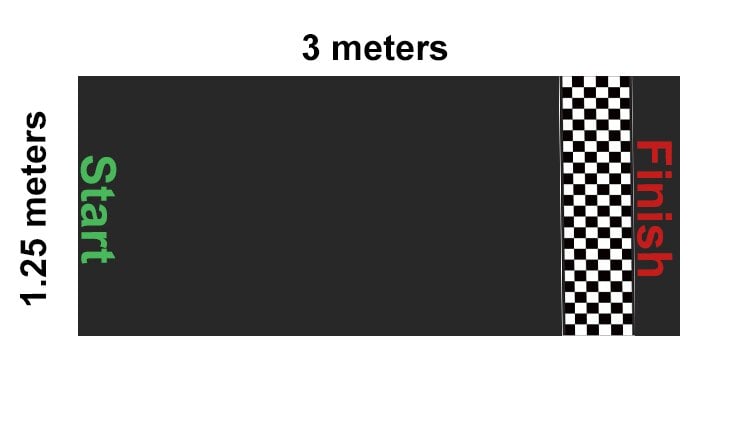
Đường đua Bước đầu tiên trong việc tạo ra một khóa học cho Clawbot V5 của bạn là dọn sạch một không gian trên sàn khoảng 3 mét (119 inch) x 1,25 mét (49 inch). Đây sẽ là đường đua và cho phép hai Clawbot đua cạnh nhau cùng một lúc. Đánh dấu không gian bằng băng dính hoặc bằng cách nào đó để đường ray được đánh dấu rõ ràng bằng các vạch bắt đầu và kết thúc.
![]() Mẹo dành cho giáo viên
Mẹo dành cho giáo viên
-
Tìm một khoảng không gian có kích thước 3 mét (119 inch) x 1,25 mét (49 inch). Đường đua và đường dốc có thể được thu nhỏ lại trong trường hợp không gian hạn chế, nhưng chiều rộng của đường đua phải đủ rộng để có thể chứa hai chiếc V5 Clawbot đua cùng một lúc.
-
Thúc đẩy sự phát triển có ý thức các kỹ năng học tập hợp tác bằng cách xem lại các mẹo về Chiến lược và Làm việc nhóm (Google / .docx / .pdf) với học sinh.
-
Chuẩn bị vật liệu để xây dựng đường dốc trước. Có những vật liệu được đề xuất trong phần phần cứng/phần mềm, nhưng bất cứ thứ gì từ bìa ba vòng đến ván ép đều có thể dùng được.
Bước 2: Xây dựng đường dốc
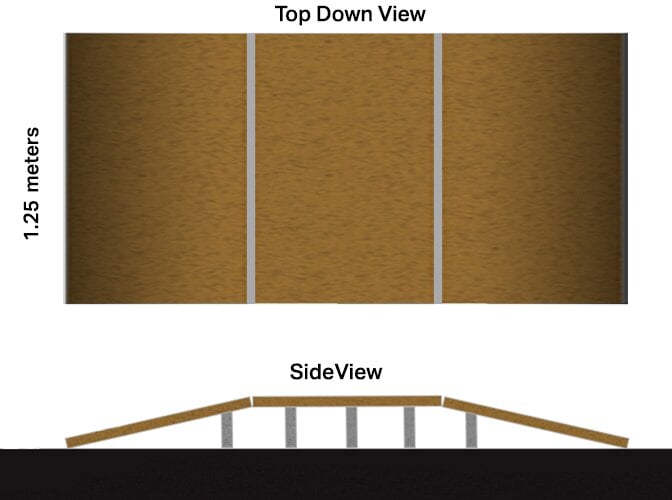
Bước tiếp theo là xây dựng một đoạn đường dốc rộng bằng sân (khoảng 1,25 mét hoặc 49 inch). Đường dốc có thể được xây dựng bằng gỗ, bìa cứng hoặc bất cứ thứ gì có sẵn đủ mạnh để giữ trọng lượng của hai V5 Clawbots. Đường dốc nên có hai dốc, đầu tiên lên trên và sau đó xuống dưới, và nên dốc dần dần để không có khoảng trống ở hai đầu của nó.
Bước 3: Định vị Đường dốc
 Đường đua
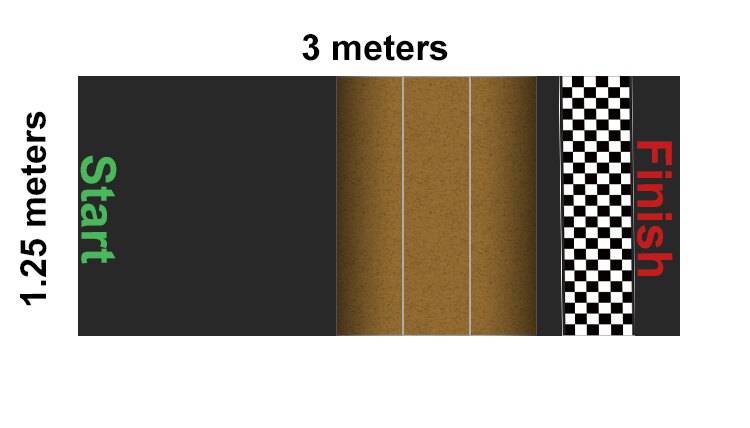
Đường đua Di chuyển đoạn đường nối sang nửa sau của khóa học. Đường dốc phải cách vạch xuất phát ít nhất 1,5 mét (59 inch). Đảm bảo đường dốc được định vị sao cho các cạnh của nó song song chính xác với các cạnh của đường ray. Nói cách khác, hãy đảm bảo rằng đường dốc không bị cong để bánh trước của V5 Clawbot có thể tiếp cận đường dốc cùng một lúc.
Bước 4: Chuẩn bị Robot

Bật V5 Robot Brain, đảm bảo rằng nó được ghép nối với Bộ điều khiểnvà chạy chương trìnhDrivetrên V5 Robot Brain để bạn có thể điều khiển robot không dây bằng Bộ điều khiển V5.
Bước 5: Chạy với cánh tay thả lỏng
Các Clawbot V5 nên hạ tất cả cánh tay của chúng xuống ở vị trí bắt đầu hoặc nghỉ ngơi.
![]() Mẹo dành cho giáo viên
Mẹo dành cho giáo viên
-
Kiểm tra xem cánh tay của mỗi V5 Clawbot đã được hạ xuống vị trí bắt đầu hoặc vị trí nghỉ chưa.
-
Chia nhóm thành từng cặp. Trong vòng đầu tiên, mỗi cặp sẽ đua V5 Clawbots với nhau.
-
Sử dụng thể thức vòng tròn tính điểm nếu số đội không bằng nhau.
-
Thay đổi các cặp sau mỗi vòng nếu bạn có bốn đội trở lên. Đảm bảo rằng hai đội nhanh nhất sẽ đối đầu với nhau ở vòng tiếp theo, sau đó là hai đội nhanh nhất tiếp theo, v.v.
Bước 6: Chạy với cánh tay có góc cạnh
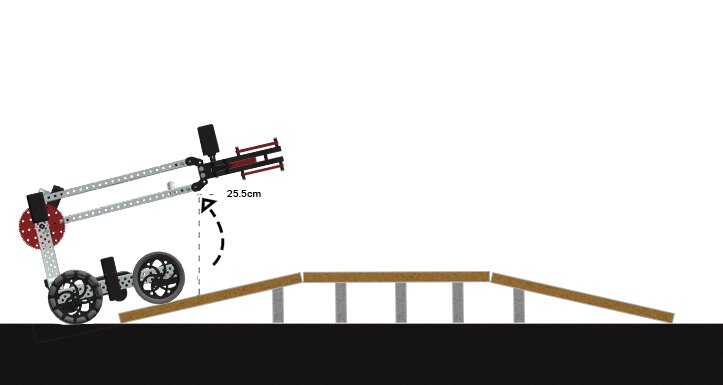
Trong vòng thứ hai, các cặp đôi mới sẽ lại đua Clawbot của mình một cách trực tiếp.
Trong vòng này, cánh tay của mỗi Clawbot phải được nâng lên ít nhất 25,5 cm (khoảng 10 inch) so với vị trí ban đầu.
![]() Mẹo dành cho giáo viên
Mẹo dành cho giáo viên
-
Kiểm tra vị trí của từng cánh tay trước mỗi cuộc đua để đảm bảo cánh tay được đặt đúng vị trí.
-
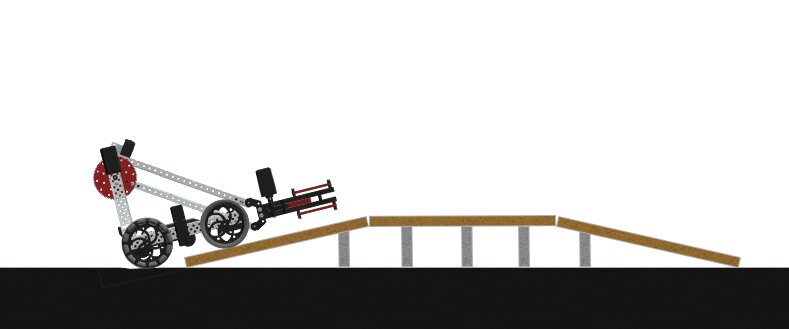
Thông báo cho học sinh rằng V5 Clawbot dễ bị đổ khi cánh tay càng nâng lên (đặc biệt là khi cánh tay nâng lên và càng đang giữ một vật).
Bước 7: Chạy với cánh tay gần thẳng đứng
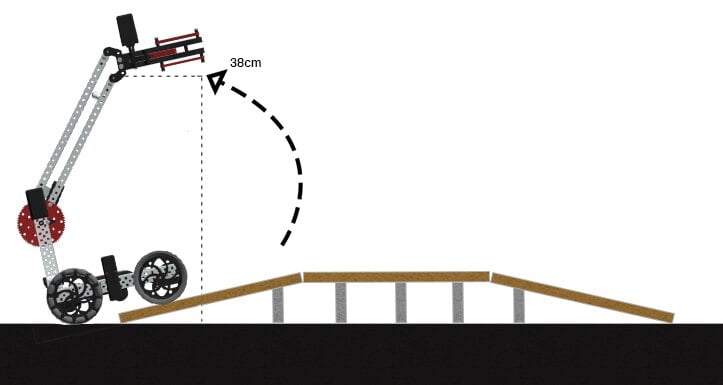
Trong vòng thứ ba, cánh tay của V5 Clawbots phải nâng lên 38 cm (khoảng 15 inch) so với vị trí ban đầu.
Nếu chỉ có hai đội, đội chiến thắng trong trận đấu Vòng 3 sẽ là đội chiến thắng trong thử thách.
![]() Mẹo dành cho giáo viên
Mẹo dành cho giáo viên
-
Kiểm tra vị trí của từng cánh tay trước mỗi cuộc đua để đảm bảo cánh tay được đặt đúng vị trí.
-
Cho phép những đội chiến thắng ở mỗi trận đấu tiếp tục đối đầu trong một trận đấu Vòng 3 khác, cho đến khi một đội nổi lên là đội chiến thắng chung cuộc.
-
Thông báo cho học sinh rằng V5 Clawbot dễ bị đổ khi cánh tay càng nâng lên (đặc biệt là khi cánh tay nâng lên và càng đang giữ một vật).