
পাঠ ২: '৫' নম্বরে গাড়ি চালান
এই পাঠে, ভিআর রোবটটি নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড-এ '5' নম্বরে গাড়ি চালিয়ে '1' নম্বরে ফিরে যাবে!

লক্ষ্য করুন যে VR রোবট X অক্ষ বরাবর ভ্রমণ করবে এবং X মান বৃদ্ধি পাবে নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড-এ '5' নম্বরে যেতে।

ভিআর রোবটটি নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড-এ '5' নম্বরের অবস্থানে চলে যাবে। যাইহোক, ভিআর রোবট সেই নম্বরে নেভিগেট করার আগে, ভিআর রোবটকে সেই নম্বরটির অবস্থান কোথায় তা জানাতে হবে। খেলার মাঠের কেন্দ্র থেকে শুরু করে, '5' নম্বরের স্থানাঙ্কগুলি হল (-100, -900)।

-
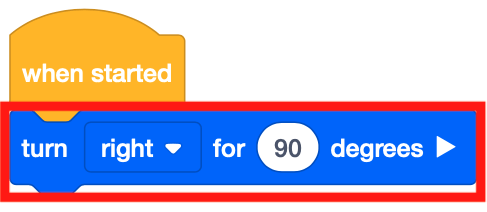
শুরু করার জন্য, VR রোবটটিকে '5' নম্বরের মুখোমুখি হতে হবে। কর্মক্ষেত্রে একটি [Turn for] ব্লক টেনে আনুন।
-
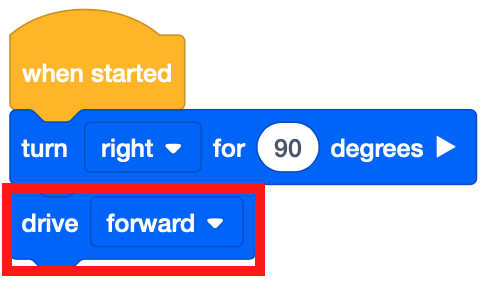
[ড্রাইভ] নন-ওয়েটিং ব্লকটিকে কর্মক্ষেত্রে টেনে আনুন।
-
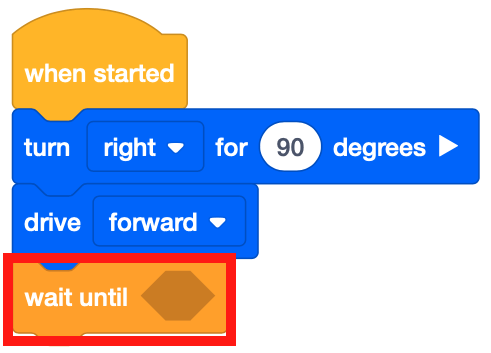
[ড্রাইভ] ব্লকের নিচে একটি [অপেক্ষা করুন] ব্লক সংযুক্ত করুন।
-
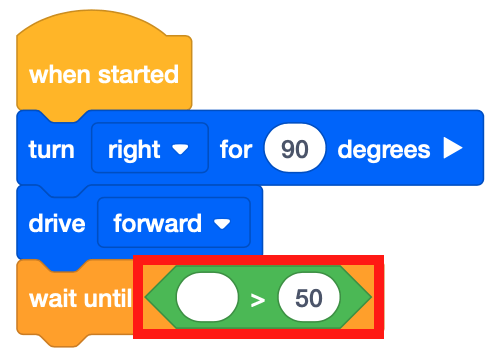
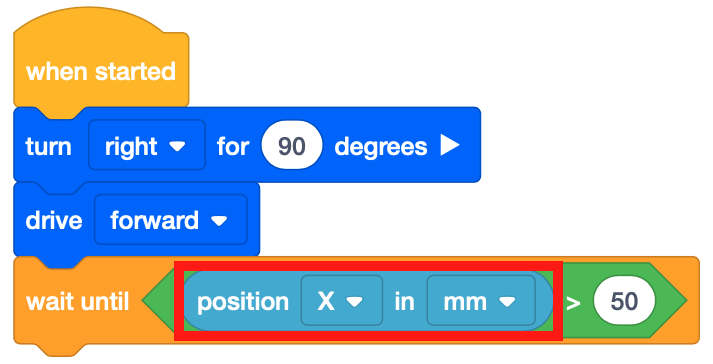
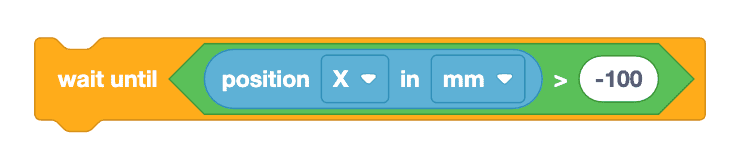
ব্লকটি বুলিয়ান শর্ত স্বীকার না করা পর্যন্ত অপেক্ষা করুন। ঠিক দূরত্ব সেন্সর ইউনিটের মতো, এই প্রকল্পটি নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ডএর মাধ্যমে ড্রাইভ করতে শর্তাবলী ব্যবহার করবে। <Greater than> বুলিয়ান রিপোর্টার ব্লকটি [অপেক্ষা করুন] ব্লকে টেনে আনুন।
-
মনে রাখবেন যে <Less than> ব্লকের পরিবর্তে <Greater than> ব্লক ব্যবহার করা হয়েছে কারণ VR রোবটটি খেলার মাঠের বাম দিক থেকে ডানদিকে ড্রাইভ করছে। VR রোবট -900 মিলিমিটার (মিমি) এর X-মানে শুরু হচ্ছে। VR রোবট এগিয়ে যাওয়ার সাথে সাথে X-মান বৃদ্ধি পায়।
-
(রোবটের অবস্থান) ব্লকটি <Greater than> ব্লকে টেনে আনুন।
আপনার তথ্যের জন্য
(রোবটের অবস্থান) ব্লক হল একটি সংখ্যাসূচক রিপোর্টার ব্লক যা VR রোবটের কেন্দ্রের X বা Y স্থানাঙ্কের অবস্থান রিপোর্ট করে। X বা Y স্থানাঙ্কের অবস্থান রিপোর্ট করা হয়েছে কিনা তা চয়ন করুন।
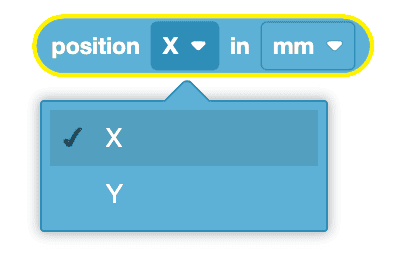
সুইচ ব্লক ব্যবহার করা
এটি হল সুইচ (রোবটের অবস্থান) ব্লক। Y স্থানাঙ্ক রিপোর্ট করার জন্য (রোবটের অবস্থান) ব্লকের প্যারামিটার পরিবর্তন করতে, স্থানাঙ্ক মানের জন্য কেবল "Y" টাইপ করুন অথবা প্রদর্শিত স্থানাঙ্ক পরামর্শটি নির্বাচন করুন।

(রোবটের অবস্থান) ব্লকটি মিলিমিটার (মিমি) বা ইঞ্চিতে মান রিপোর্ট করতে পারে।
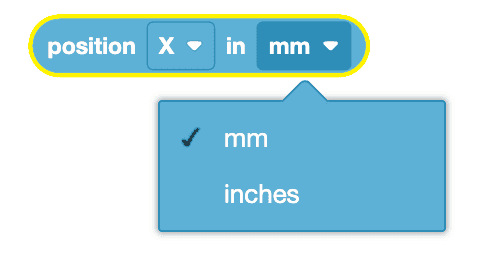
আপনি "ইঞ্চি" টাইপ করে অথবা প্রদর্শিত পরামর্শটি নির্বাচন করে সুইচ (রোবটের অবস্থান) ব্লক ব্যবহার করার সময় পরিমাপের এককের প্যারামিটার পরিবর্তন করতে পারেন। পরিমাপের এককের জন্য প্যারামিটার টাইপ করার সময় সমস্ত বড় অক্ষর ব্যবহার করতে ভুলবেন না।
-
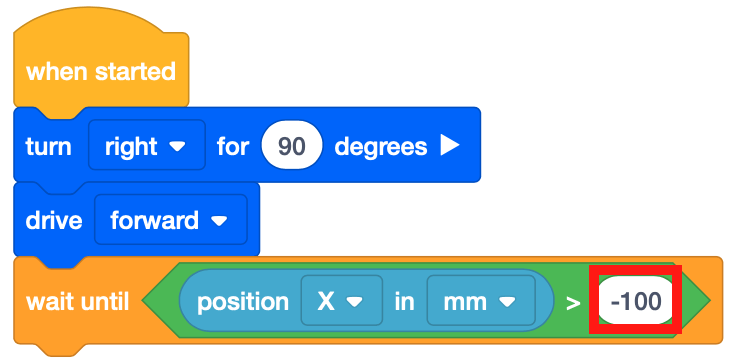
<Greater than> ব্লকের প্যারামিটার -১০০ তে সেট করুন।
-
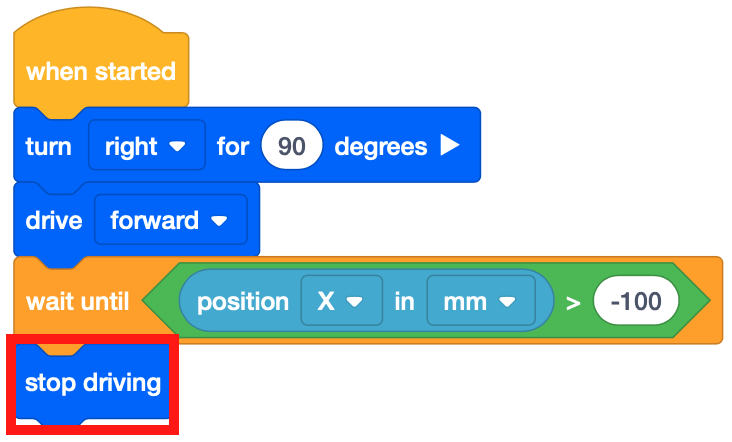
একটি [ড্রাইভিং বন্ধ করুন] ব্লকে টেনে আনুন এবং এটিকে প্রকল্পে যোগ করুন।
- নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড খুলুন যদি এটি ইতিমধ্যে খোলা না থাকে এবং প্রকল্পটি চালান।
-
নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড-এ '5' নম্বরে ভিআর রোবট ড্রাইভ দেখুন।

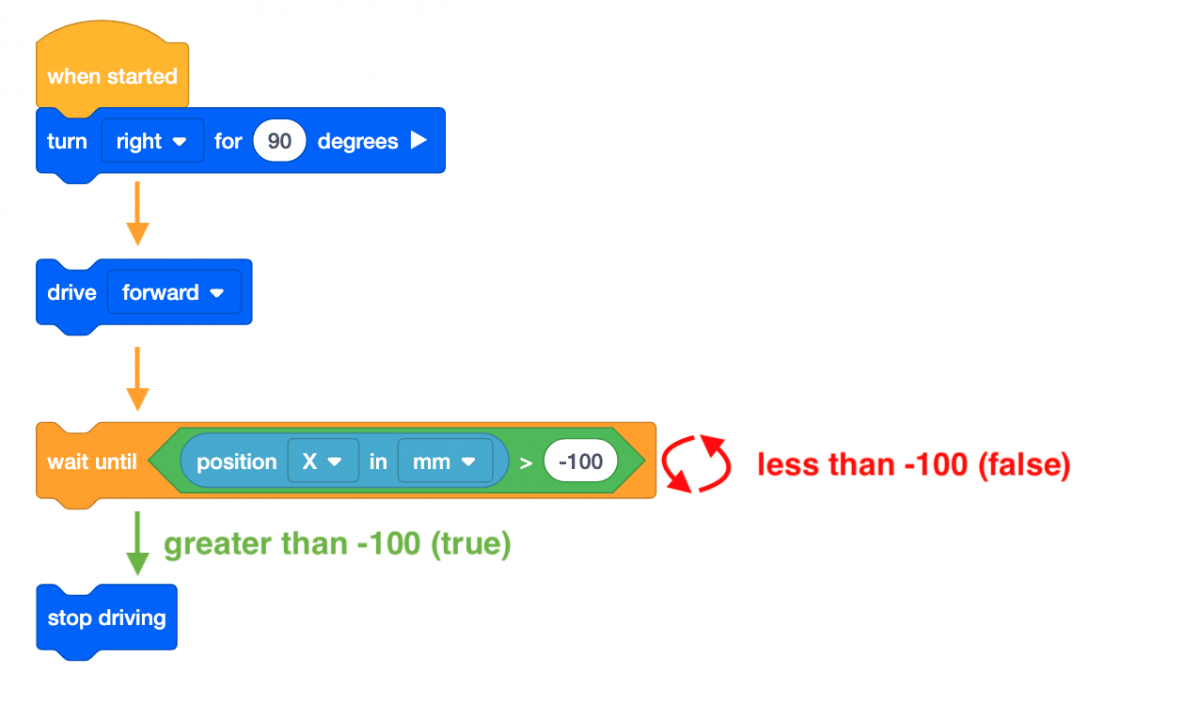
- এই প্রকল্পে, ভিআর রোবট নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ডএ '5' নম্বরে ড্রাইভ করে। [অপেক্ষা করুন] ব্লকটি ব্যবহার করা হয় যাতে VR রোবটটি এগিয়ে যেতে থাকবে যতক্ষণ না X-মানটি নির্দেশিত নম্বরটি চালু করা স্থানাঙ্কের X-মানের চেয়ে বেশি হয়।
- একবার X-মান -100-এর বেশি হলে, প্রকল্পটি স্ট্যাকের পরবর্তী ব্লকে চলে যায়, যা একটি [স্টপ ড্রাইভিং] ব্লক। যেহেতু '5' নম্বরের X-মান -100, X-মান -100-এর বেশি হলে VR রোবট গাড়ি চালানো বন্ধ করে দেবে৷
সুইচ ব্লক ব্যবহার করা
এই পাঠে, আপনি শিখেছেন কিভাবে VEXcode [Wait until] ব্লকটি বুলিয়ান কন্ডিশন সহ ব্যবহার করতে হয় যাতে রোবটটি পরবর্তী আচরণে যাওয়ার আগে X-অক্ষে -১০০ এর বেশি অবস্থানে পৌঁছানো পর্যন্ত অপেক্ষা করতে পারে।
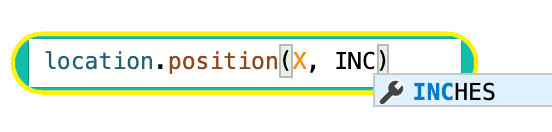
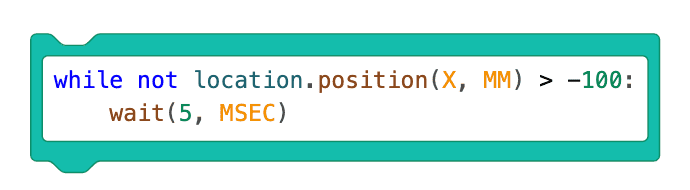
নিচের ছবিতে পাইথনে একই কমান্ড সহ সুইচ [অপেক্ষা করুন] ব্লক দেখানো হয়েছে। সুইচ ব্লকের মধ্যে, while not location.position(X, MM) > -100: হল প্রথম পাইথন কমান্ড যা পরীক্ষা করে যে X-অক্ষ বরাবর রোবটের অবস্থান -100 এর চেয়ে বেশি কিনা।
ইন্ডেন্টেড কমান্ড, wait (5, MSEC)একটি নির্দিষ্ট সময়ের জন্য চেকের সম্পাদনকে বিরতি দেয়। এই উদাহরণে, প্রকল্পটি পরীক্ষা করে যে রোবটের অবস্থান প্রতি ৫ MSEC-তে -১০০ এর X মানের চেয়ে বেশি কিনা। এই কোডের লাইনটি কোডের প্রথম লাইনের নীচে ইন্ডেন্ট করা হয়েছে কারণ এই কমান্ডটি এমন আচরণ যা শর্ত (-১০০ এর বেশি X স্থানাঙ্ক মান) পূরণ না হওয়া পর্যন্ত পুনরাবৃত্তি হবে।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।