
Bài 2: Lái xe đến số '5'
Trong Bài học này, Robot VR sẽ di chuyển đến số '5' và quay trở lại số '1' trên Sân chơi Bản đồ lưới số số!

Lưu ý rằng Robot VR sẽ di chuyển dọc theo trục X với các giá trị X tăng dần để di chuyển đến số '5' trên Sân chơi Bản đồ lưới số .

Robot VR sẽ di chuyển đến vị trí số '5' trên Sân chơi bản đồ lưới số . Tuy nhiên, trước khi VR Robot có thể điều hướng đến số đó, VR Robot phải được cho biết vị trí của số đó. Bắt đầu từ trung tâm của Sân chơi, tọa độ của số '5' là (-100, -900).

-
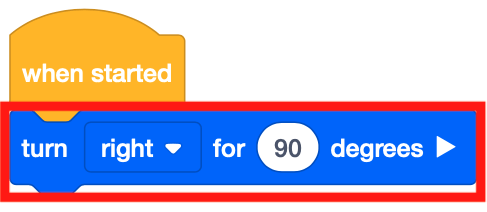
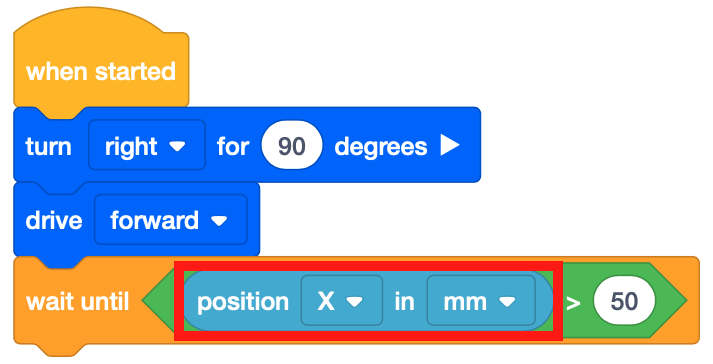
Để bắt đầu, Robot VR cần phải hướng về số '5'. Kéo khối [Quay tới] vào không gian làm việc.
-
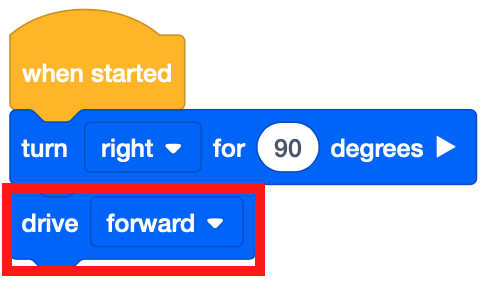
Kéo khối [Ổ đĩa] không chờ vào không gian làm việc.
-
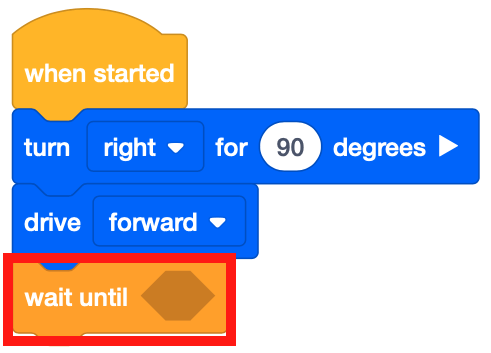
Đính kèm khối [Chờ cho đến] bên dưới khối [Ổ đĩa].
-
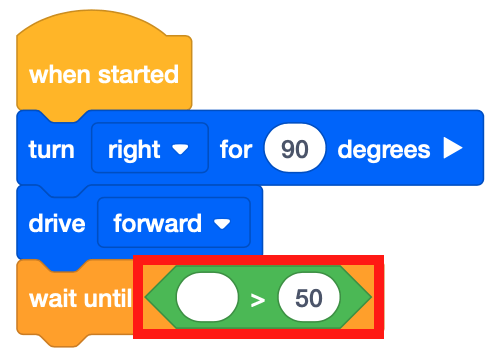
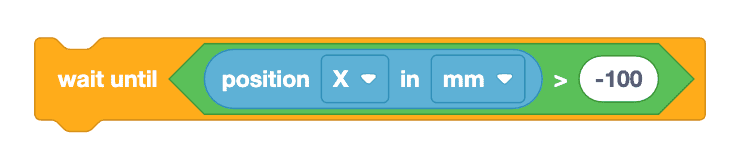
Khối [Chờ cho đến khi] chấp nhận các điều kiện Boolean. Giống như Đơn vị cảm biến khoảng cách, dự án này sẽ sử dụng các điều kiện để điều khiển Sân chơi bản đồ lưới số . Kéo khối báo cáo Boolean <Greater than> vào khối [Chờ cho đến].
-
Lưu ý rằng khối <Greater than> được sử dụng thay cho khối <Less than> vì Robot VR đang lái xe về phía bên phải từ phía bên trái của Sân chơi. Robot VR bắt đầu ở giá trị X là -900 milimét (mm). Khi Robot VR tiến về phía trước, giá trị X sẽ tăng lên.
-
Kéo khối (Vị trí của Robot) vào khối <Greater than>.
Để bạn biết
Khối (Vị trí của Robot) là khối báo cáo số về vị trí tọa độ X hoặc Y của tâm Robot VR. Chọn xem vị trí tọa độ X hoặc Y có được báo cáo không.
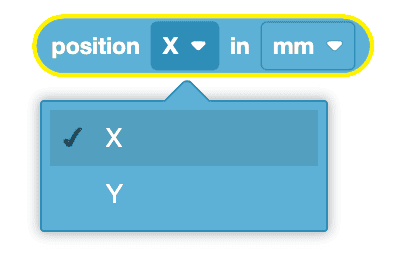
Sử dụng khối chuyển đổi
Đây là khối Chuyển đổi (Vị trí của Robot). Để thay đổi tham số của khối (Vị trí của Robot) để báo cáo tọa độ Y, chỉ cần nhập "Y" cho giá trị tọa độ hoặc chọn gợi ý tọa độ xuất hiện.

Khối (Vị trí của Robot) có thể báo cáo các giá trị tính bằng milimét (mm) hoặc inch.
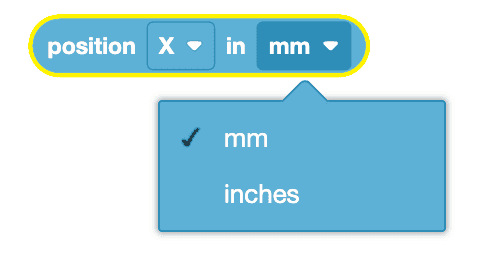
Bạn có thể thay đổi tham số cho đơn vị đo lường khi sử dụng khối Chuyển đổi (Vị trí của robot) bằng cách chỉ cần nhập "INCHES" hoặc chọn gợi ý xuất hiện. Hãy đảm bảo sử dụng chữ in hoa khi nhập các tham số cho đơn vị đo lường.
-
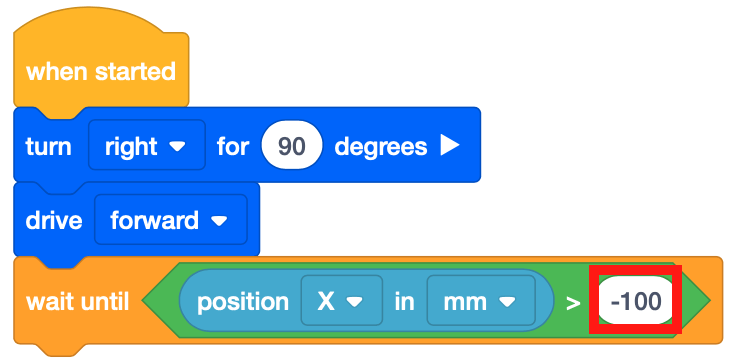
Đặt tham số của khối <Greater than> thành -100.
-
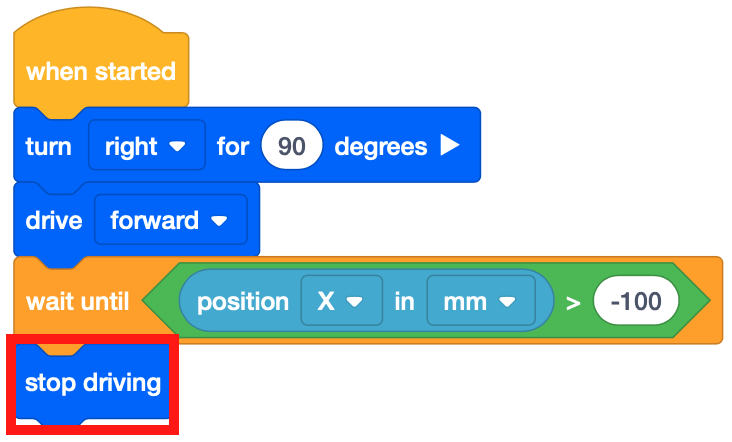
Kéo khối [Dừng lái xe] và thêm vào dự án.
- Mở Sân chơi bản đồ lưới số nếu nó chưa được mở và chạy dự án.
-
Xem Robot VR lái đến số '5' trên Sân chơi bản đồ lưới số .

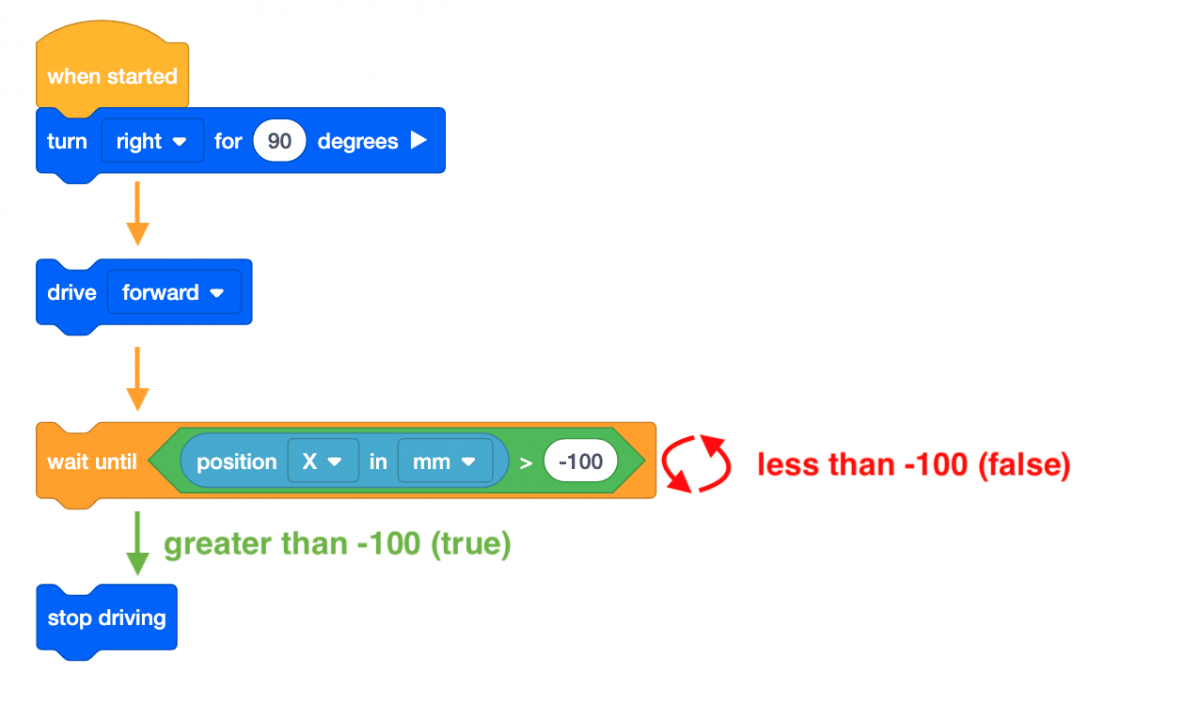
- Trong dự án này, Robot VR sẽ di chuyển đến số '5' trên Sân chơi bản đồ lưới số . Khối [Chờ cho đến khi] được sử dụng để Robot VR tiếp tục di chuyển về phía trước cho đến khi giá trị X bằng lớn hơn so với giá trị X của tọa độ mà số được chỉ định đang ở.
- Khi giá trị X lớn hơn -100, dự án sẽ chuyển sang khối tiếp theo trong ngăn xếp, đó là khối [Dừng lái xe]. Vì giá trị X của số '5' là -100, nên Robot VR sẽ dừng lái khi giá trị X lớn hơn -100.
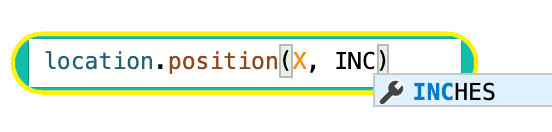
Sử dụng khối chuyển đổi
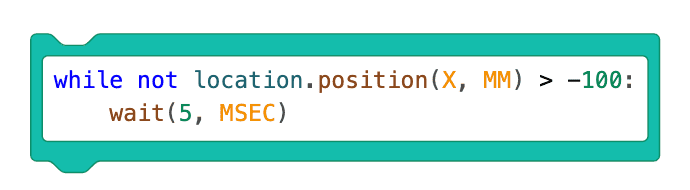
Trong Bài học này, bạn đã học cách sử dụng khối VEXcode [Chờ cho đến khi] với điều kiện Boolean để ra lệnh cho robot đợi cho đến khi robot đạt đến vị trí lớn hơn -100 trên trục X trước khi chuyển sang hành vi tiếp theo.
Hình ảnh bên dưới hiển thị khối Switch [Wait until] với các lệnh tương tự trong Python. Trong khối Switch, nhưng không location.position(X, MM) > -100: là lệnh Python đầu tiên kiểm tra xem vị trí của robot dọc theo trục X có lớn hơn -100 hay không.
Lệnh thụt lề, wait (5, MSEC)tạm dừng việc thực hiện kiểm tra trong một khoảng thời gian cụ thể. Trong ví dụ này, dự án kiểm tra xem vị trí của robot có lớn hơn giá trị X là -100 sau mỗi 5 MSEC hay không. Dòng mã này được thụt vào bên dưới dòng mã đầu tiên vì lệnh này là hành vi sẽ lặp lại cho đến khi điều kiện (giá trị tọa độ X lớn hơn -100) được đáp ứng.
Chọn nút Tiếp theo để tiếp tục phần còn lại của Bài học này.