
Lezione 2: Guida verso il numero "5"
In questa lezione, il robot VR guiderà verso il numero "5" e tornerà al numero "1" nel parco giochi della mappa della griglia dei numeri!

Si noti che il robot VR viaggerà lungo l'asse X con valori X crescenti per passare al numero "5" nel parco giochi della mappa della griglia numerica.

Il robot VR guiderà fino alla posizione del numero "5" nel parco giochi della mappa della griglia numerica. Tuttavia, prima che il robot VR possa raggiungere quel numero, al robot VR deve essere detto dove si trova quel numero. A partire dal centro del parco giochi, le coordinate del numero "5" sono (-100, -900).

-
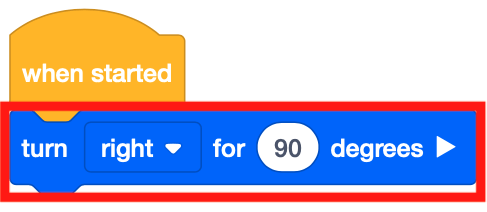
Per iniziare, il robot VR deve essere rivolto verso il numero "5". Trascina un blocco [Gira per] nell'area di lavoro.
-
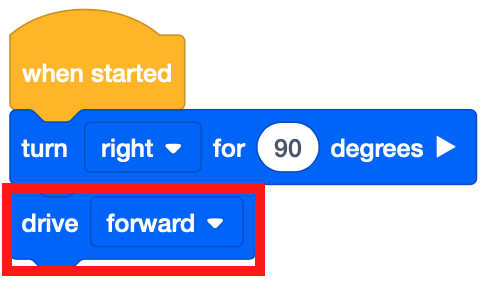
Trascinare il blocco [Drive] non in attesa nell'area di lavoro.
-
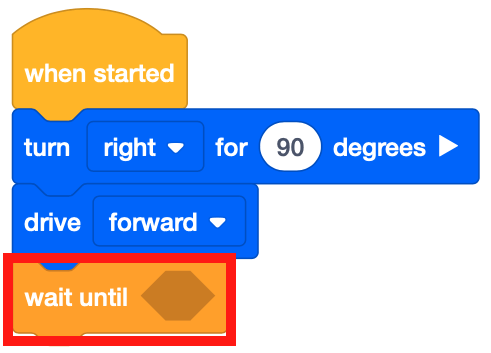
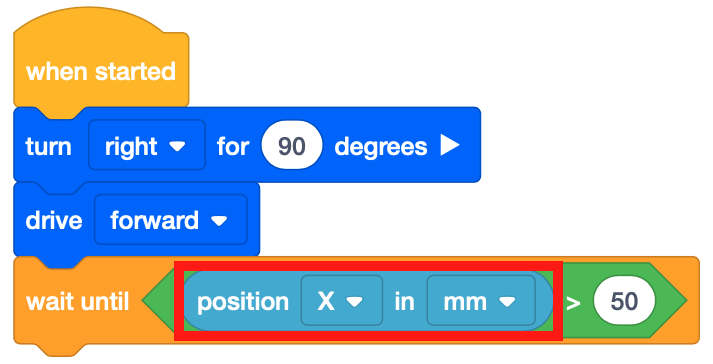
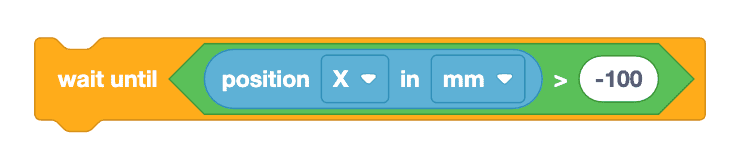
Collegare un blocco [Wait until] sotto il blocco [Drive].
-
Il blocco [Wait until] accetta le condizioni booleane. Proprio come l'unità sensore di distanza, questo progetto utilizzerà i condizionali per guidare attraverso il parco giochi della mappa della griglia numerica. Trascinare il blocco reporter <Greater than> booleano nel blocco [Wait until].
-
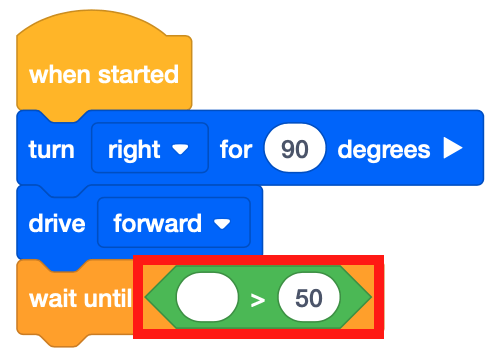
Si noti che il <Greater than> blocco viene utilizzato al posto del <Less than> blocco perché il robot VR sta guidando a destra dal lato sinistro del parco giochi. Il robot VR parte da un valore X di -900 millimetri (mm). Man mano che il robot VR avanza, i valori X aumentano.
-
Trascinare il blocco (Posizione del robot) nel <Greater than> blocco.
Per tua informazione
Il blocco (Posizione del robot) è un blocco reporter numerico che riporta la posizione delle coordinate X o Y del centro del robot VR. Scegliere se riportare la posizione della coordinata X o Y.
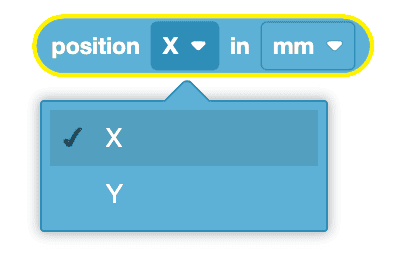
Utilizzo di blocchi di interruttori
Questo è il blocco Interruttore (Posizione del Robot). Per modificare il parametro del blocco (Posizione del robot) per riportare la coordinata Y, è sufficiente digitare "Y" per il valore della coordinata o selezionare il suggerimento di coordinata che appare.

Il blocco (Posizione del robot) può riportare valori in millimetri (mm) o pollici.
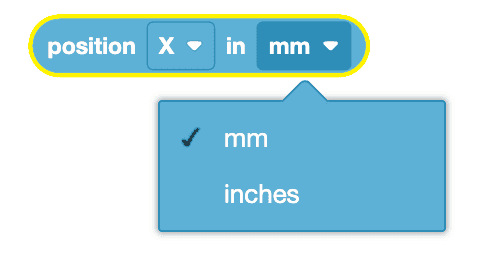
È possibile modificare il parametro per l'unità di misura durante l'utilizzo del blocco Interruttore (Posizione del robot) semplicemente digitando "POLLICI" o selezionando il suggerimento che appare. Assicurarsi di utilizzare tutte le lettere maiuscole durante la digitazione dei parametri per le unità di misura.
-
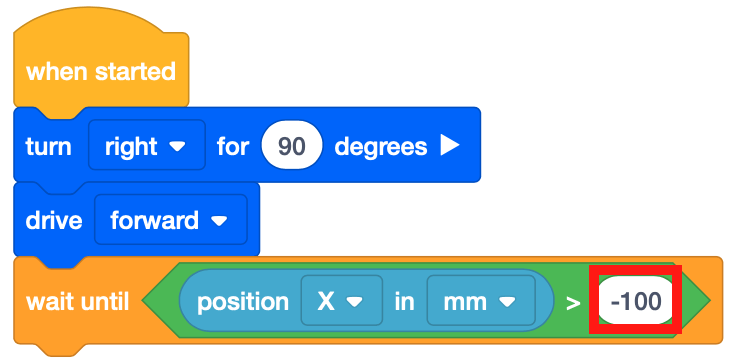
Impostare il parametro del <Greater than> blocco a -100.
-
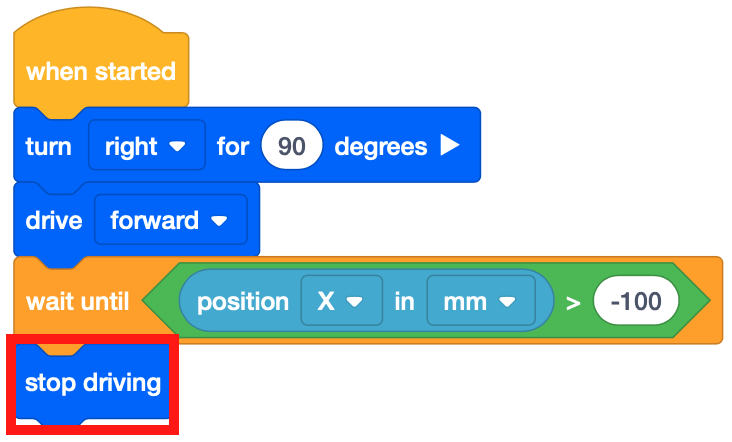
Trascina un blocco [Stop driving] e aggiungilo al progetto.
- Aprire il Number Grid Map Playground se non è già aperto ed eseguire il progetto.
-
Guarda il robot VR guidare al numero "5" nel parco giochi della mappa della griglia dei numeri.

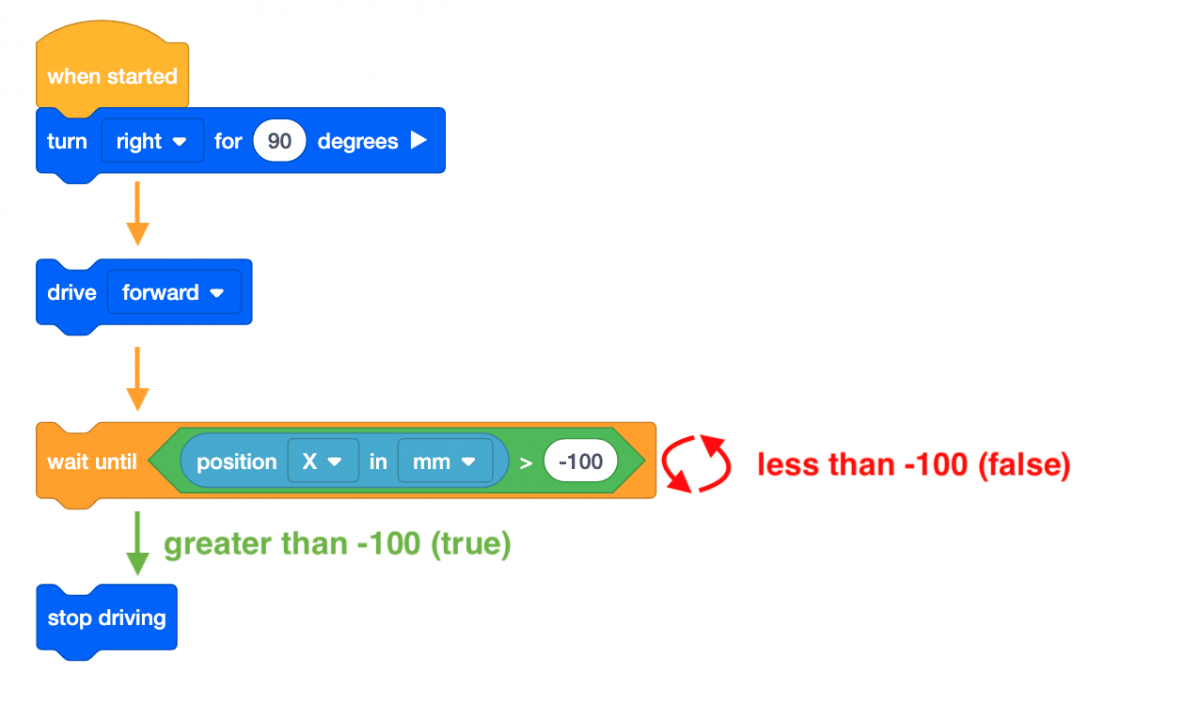
- In questo progetto, il robot VR si sposta sul numero "5" nel parco giochi della mappa della griglia dei numeri. Il blocco [Wait until] viene utilizzato in modo che il robot VR continui ad avanzare fino a quando il valore X è maggiore del valore X della coordinata su cui si trova il numero indicato.
- Una volta che il valore X è maggiore di -100, il progetto passa al blocco successivo nella pila, che è un blocco [Stop driving]. Poiché il valore X del numero "5" è -100, il robot VR smetterà di guidare una volta che il valore X è maggiore di -100.
Utilizzo dei blocchi degli interruttori
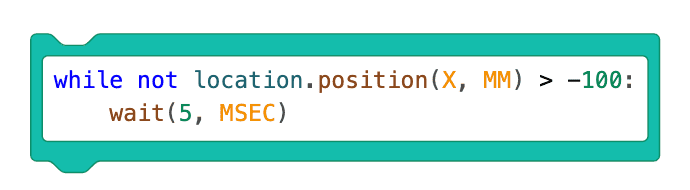
In questa lezione, hai imparato come utilizzare il blocco VEXcode [Attendi fino a] con una condizione booleana per comandare al robot di attendere fino a quando il robot non raggiunge una posizione maggiore di -100 sull'asse X prima di passare al comportamento successivo.
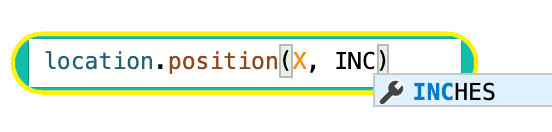
L'immagine sottostante mostra il blocco Switch [Wait until] con gli stessi comandi in Python. All'interno del blocco Switch, while notlocation.position (X, MM) > -100: è il primo comando Python che controlla se la posizione del robot lungo l'asse X è maggiore di -100.
Il comando rientrato, wait (5, MSEC) sospende l'esecuzione del controllo per un determinato periodo di tempo. In questo esempio, il progetto controlla se la posizione del robot è maggiore o meno di un valore X di -100 ogni 5 MSEC. Questa riga di codice è rientrata sotto la prima riga di codice perché questo comando è il comportamento che si ripeterà fino a quando non verrà soddisfatta la condizione (un valore di coordinata X maggiore di -100).
Selezionare il pulsante Avanti per continuare con il resto della lezione.