
Lição 2: Dirija para o número ‘5’
Nesta lição, o robô de RV dirigirá para o número ‘5‘ e voltará para o número ‘1‘ no Playground do Mapa de Grade Numérica!

Observe que o Robô VR estará viajando ao longo do eixo X com os valores de X aumentando para se mover para o número ‘5’ no Playground do Mapa de Grade Numérica.

O Robô VR irá conduzir até ao local do número ‘5‘ no Playground do Mapa da Grade de Números. No entanto, antes que o Robô de RV possa navegar para esse número, o Robô de RV deve ser informado onde está a localização desse número. Começando no centro do Playground, as coordenadas do número ‘5’ são (-100, -900).

-
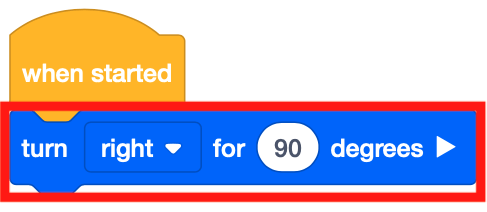
Para começar, o robô VR precisa estar voltado para o número ‘5’. Arraste um bloco [Turn for] para o espaço de trabalho.
-
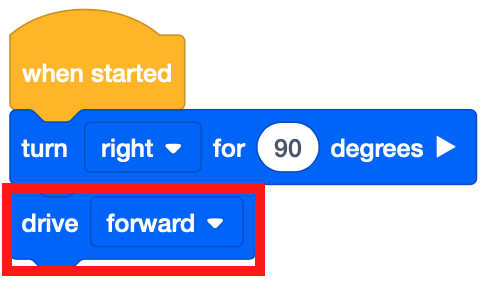
Arraste o bloco sem espera [Drive] para o espaço de trabalho.
-
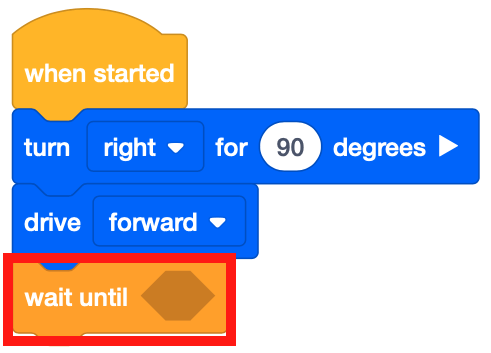
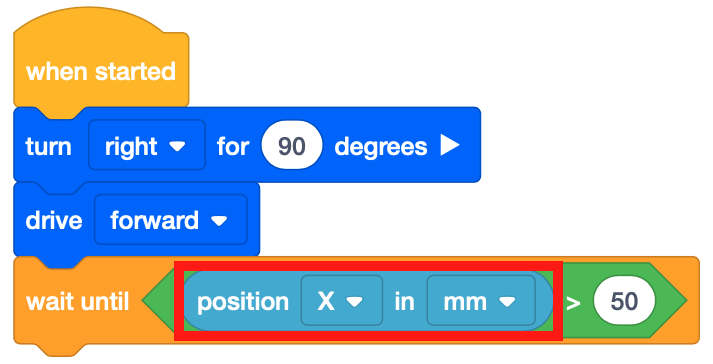
Anexe um bloco [Aguarde até] abaixo do bloco [Drive].
-
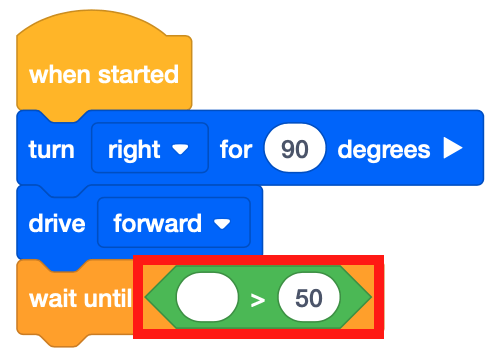
O bloco [Aguarde até] aceita condições booleanas. Assim como a Unidade de Sensor de Distância, este projeto usará as condicionais para percorrer o Playground do Mapa de Grade Numérica. Arraste o bloco <Greater than> Boolean reporter para o bloco [Wait until].
-
Observe que o <Greater than> bloco é usado em vez do <Less than> bloco porque o Robô VR está dirigindo para a direita a partir do lado esquerdo do Playground. O Robô VR está a partir de um valor X de -900 milímetros (mm). À medida que o robô VR avança, os valores X aumentam.
-
Arraste o bloco (Posição do Robô) para dentro do <Greater than> bloco.
Para sua informação
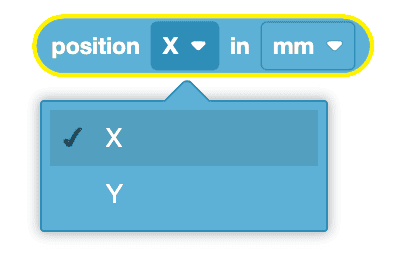
O bloco (Posição do Robô) é um bloco relator numérico que relata a posição da coordenada X ou Y do centro do Robô VR. Escolha se a posição da coordenada X ou Y é relatada.
Usando Blocos de Interruptor
Este é o bloco Switch (Posição do Robô). Para alterar o parâmetro do bloco (Posição do robô) para relatar a coordenada Y, basta digitar "Y" para o valor da coordenada ou selecionar a sugestão de coordenada que aparece.

O bloco (Posição do robô) pode relatar valores em milímetros (mm) ou polegadas.
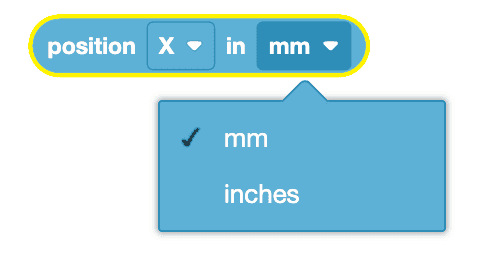
Você pode alterar o parâmetro para a unidade de medida ao usar o bloco Switch (Posição do robô) simplesmente digitando "POLEGADAS" ou selecionando a sugestão que aparece. Certifique-se de usar todas as letras maiúsculas ao digitar parâmetros para unidades de medida.
-
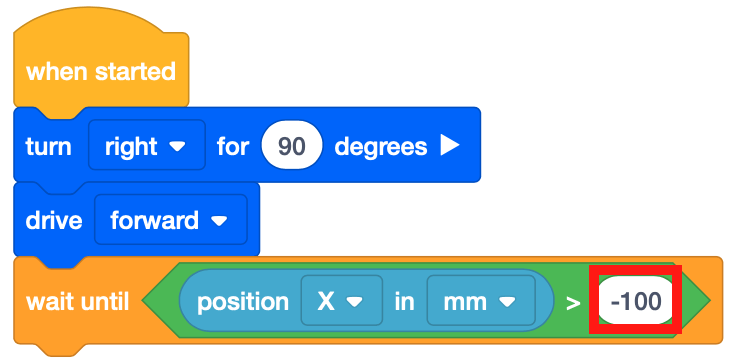
Defina o parâmetro do <Greater than> bloco para -100.
-
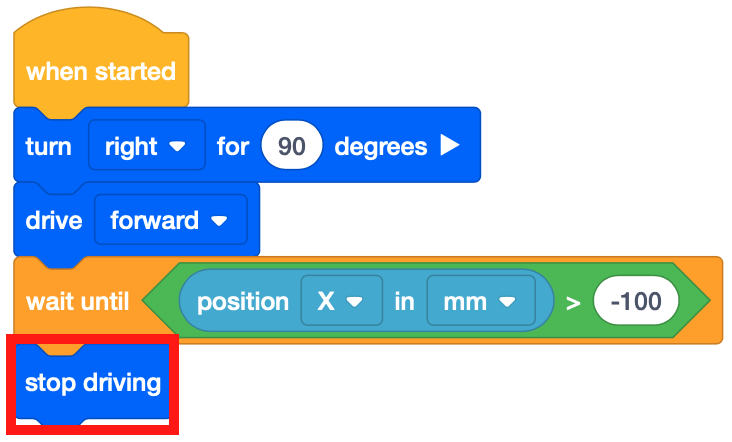
Arraste um bloco [Stop driving] e adicione-o ao projeto.
- Abra o Playground do Mapa de Grade Numérica, se ainda não estiver aberto, e execute o projeto.
-
Assista ao robô VR dirigir para o número ‘5’ no Playground Number Grid Map.

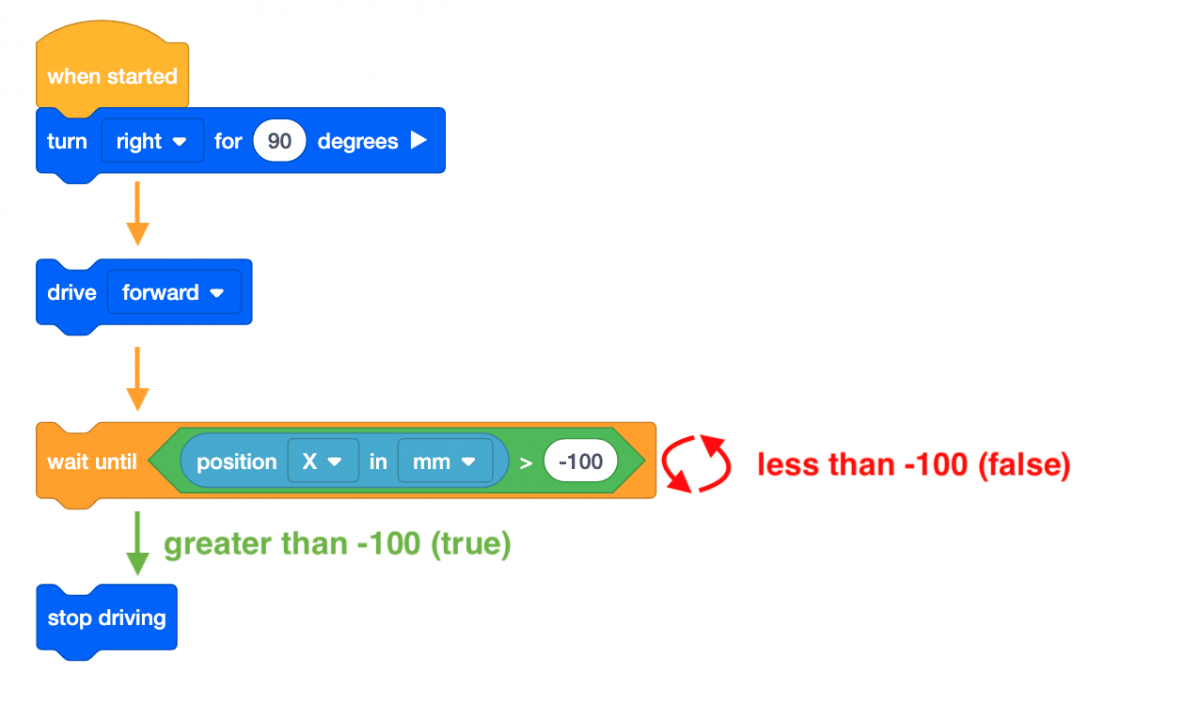
- Neste projeto, o robô VR dirige para o número ‘5’ no Number Grid Map Playground. O bloco [Aguarde até] é usado para que o Robô VR continue a avançar até que o valor X seja maior que o valor X da coordenada em que o número indicado está ligado.
- Assim que o valor X for maior que -100, o projeto passa para o próximo bloco da pilha, que é um bloco [Stop driving]. Como o valor X do número ‘5’ é -100, o Robô VR parará de dirigir assim que o valor X for maior que -100.
Usando Blocos de Interruptor
Nesta lição, você aprendeu a usar o bloco VEXcode [Wait until] com uma condição booleana para comandar o robô a esperar até que ele atinja uma posição superior a -100 no eixo X antes de passar para o próximo comportamento.

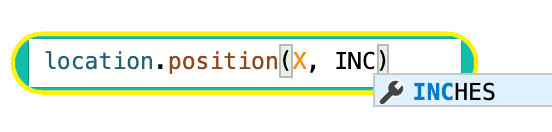
A imagem abaixo mostra o bloco Switch [Wait until] com os mesmos comandos em Python. Dentro do bloco Switch, enquanto não location.position(X, MM) > -100: é o primeiro comando Python que verifica se a posição do robô ao longo do eixo X é maior que -100.
O comando indented, wait (5, MSEC) pausa a execução da verificação por um período de tempo específico. Neste exemplo, o projeto verifica se a posição do robô é maior ou não do que um valor X de -100 a cada 5 MS. Essa linha de código é recuada abaixo da primeira linha de código porque esse comando é o comportamento que se repetirá até que a condição (um valor de coordenada X maior que -100) seja atendida.

Selecione o botão Seguinte para continuar com o resto desta lição.