
Lección 2: Conducir al número ‘5’
¡En esta lección, el robot VR conducirá hasta el número ‘5‘ y volverá al número ‘1‘ en el patio de recreo del mapa de cuadrícula numérica!

Tenga en cuenta que el robot VR viajará a lo largo del eje X con valores X aumentando para moverse al número ‘5‘ en el patio de recreo del mapa de cuadrícula numérica.

El robot VR conducirá hasta la ubicación del número ‘5‘ en el patio de recreo del mapa de cuadrícula numérica. Sin embargo, antes de que el Robot VR pueda navegar a ese número, se le debe decir al Robot VR dónde está la ubicación de ese número. Comenzando en el centro del patio de recreo, las coordenadas del número ‘5’ son (-100, -900).

-
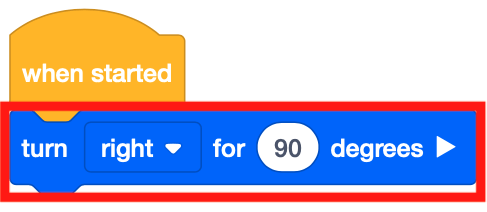
Para comenzar, el robot VR debe estar frente al número ‘5’. Arrastre un bloque [Turn for] al área de trabajo.
-
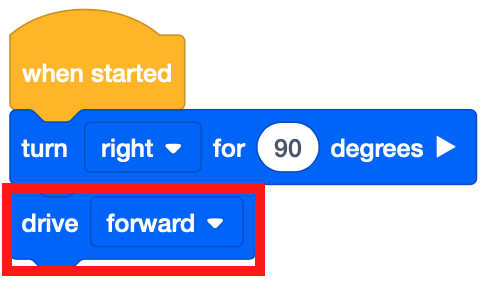
Arrastre el bloque de no espera [Drive] al área de trabajo.
-
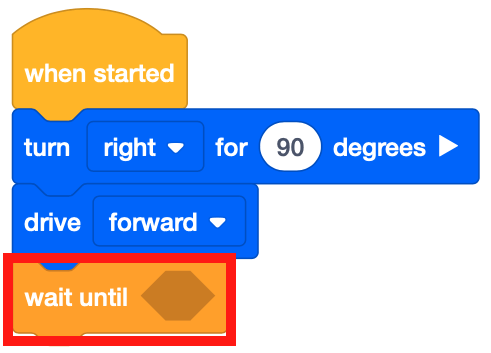
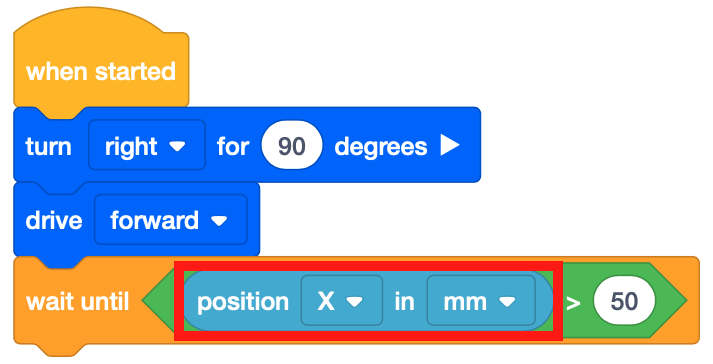
Adjunte un bloque [Esperar hasta] debajo del bloque [Conducir].
-
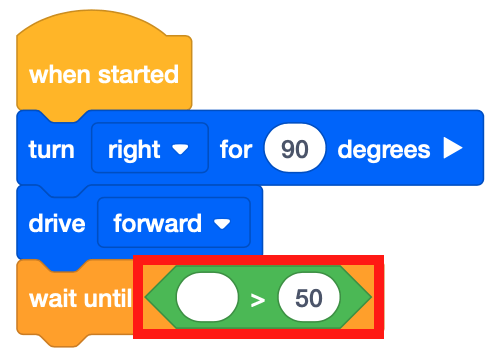
El bloque [Esperar hasta] acepta condiciones booleanas. Al igual que la unidad de sensor de distancia, este proyecto utilizará las condiciones para conducir a través del patio de recreo del mapa de cuadrícula numérica. Arrastre el bloque informador <Greater than> booleano al bloque [Esperar hasta].
-
Tenga en cuenta que se utiliza el <Greater than> bloque en lugar del <Less than> bloque porque el robot VR está conduciendo hacia la derecha desde el lado izquierdo del patio de recreo. El robot VR está comenzando con un valor X de -900 milímetros (mm). A medida que el robot VR avanza, los valores X aumentan.
-
Arrastre el bloque (Posición del robot) al <Greater than> bloque.
Para su información
El bloque (Posición del Robot) es un bloque indicador numérico que informa la posición de las coordenadas X o Y del centro del Robot VR. Elija si se informa la posición de las coordenadas X o Y.
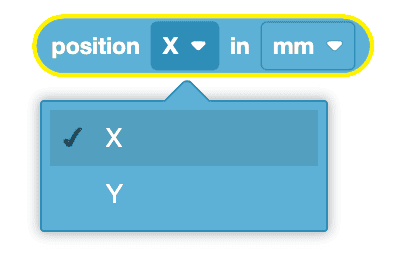
Uso de bloques de interruptores
Este es el bloque Interruptor (Posición del Robot). Para cambiar el parámetro del bloque (Posición del Robot) para informar la coordenada Y, simplemente escriba "Y" para el valor de la coordenada o seleccione la sugerencia de coordenadas que aparece.

El bloque (Posición del robot) puede informar valores en milímetros (mm) o pulgadas.
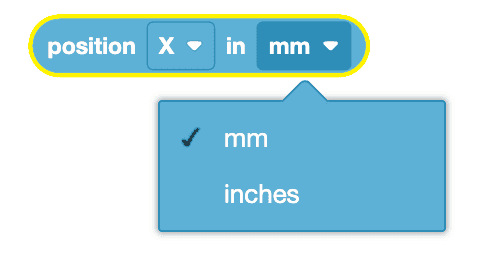
Puede cambiar el parámetro para la unidad de medida mientras utiliza el bloque Interruptor (Posición del robot) simplemente escribiendo "PULGADAS" o seleccionando la sugerencia que aparece. Asegúrese de usar todas las letras mayúsculas al escribir los parámetros para las unidades de medida.
-
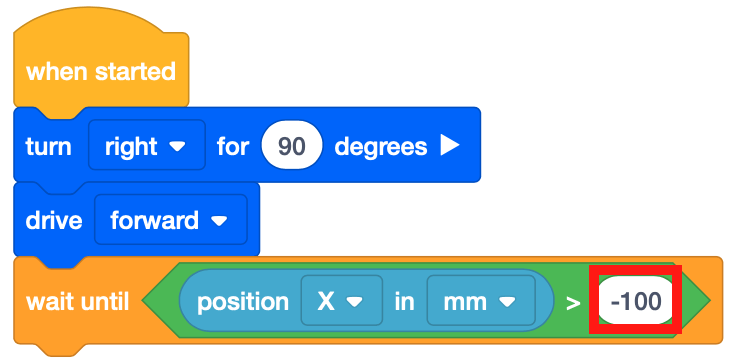
Establezca el parámetro del <Greater than> bloque en -100.
-
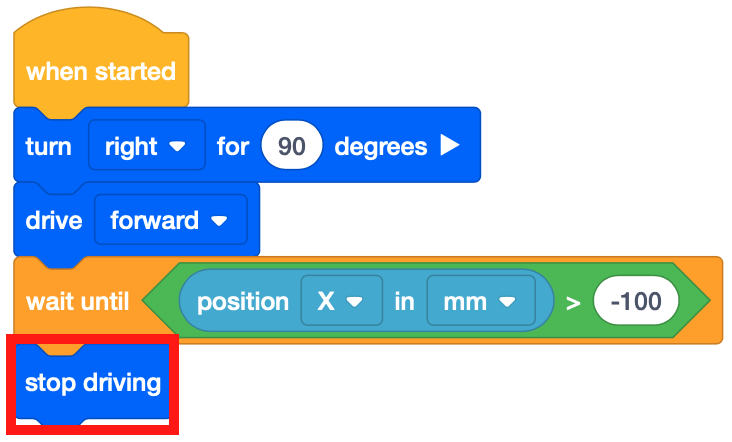
Arrastra un bloque [Stop driving] y añádelo al proyecto.
- Abra el área de juegos del mapa de cuadrícula numérica si aún no está abierta y ejecute el proyecto.
-
Mira la unidad VR Robot al número ‘5‘ en el patio de recreo del mapa de cuadrícula numérica.

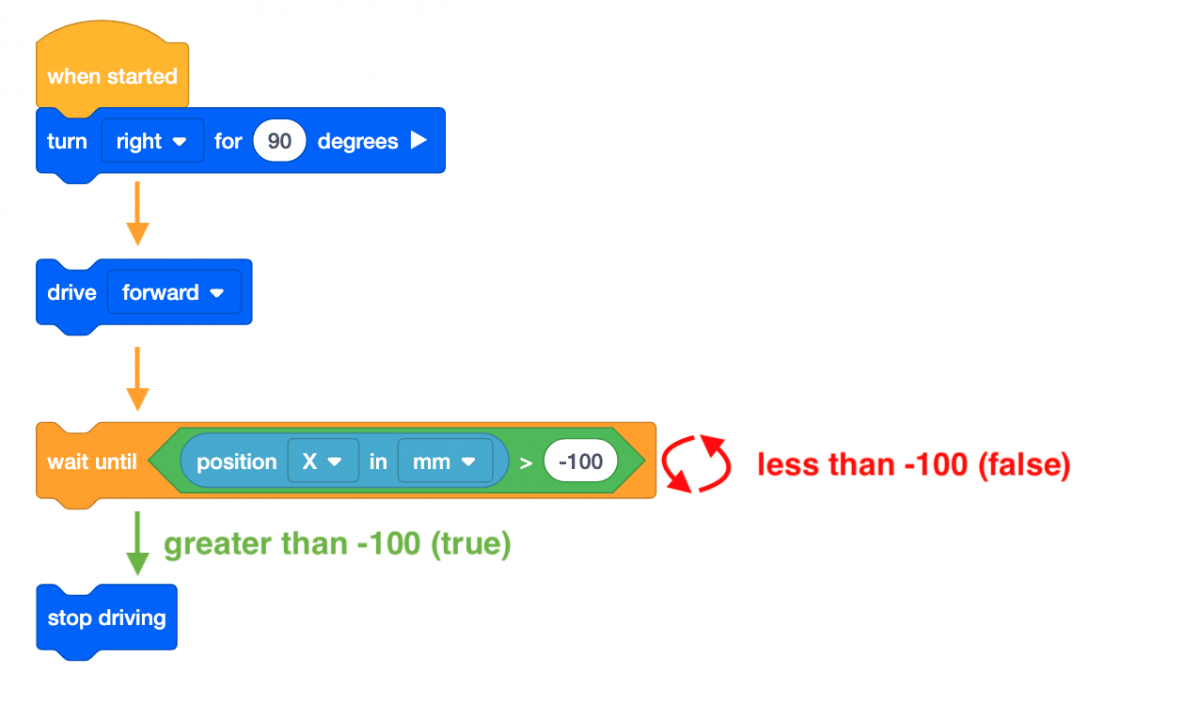
- En este proyecto, el robot VR conduce al número ‘5‘ en el patio de recreo del mapa de cuadrícula numérica. El bloque [Esperar hasta] se utiliza para que el robot VR continúe avanzando hasta que el valor X sea mayor que el valor X de la coordenada en la que está el número indicado.
- Una vez que el valor X es mayor que -100, el proyecto pasa al siguiente bloque de la pila, que es un bloque [Stop driving]. Dado que el valor X del número ‘5’ es -100, el Robot VR dejará de funcionar una vez que el valor X sea mayor que -100.
Uso de bloques de interruptores
En esta lección, aprendió a usar el bloque VEXcode [Esperar hasta] con una condición booleana para ordenar al robot que espere hasta que el robot alcance una posición superior a -100 en el eje X antes de pasar al siguiente comportamiento.

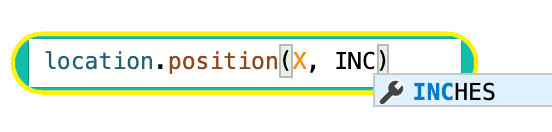
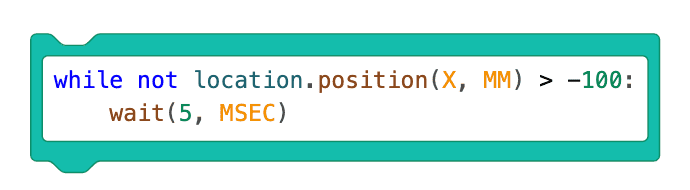
La siguiente imagen muestra el bloque Cambiar [Esperar hasta] con los mismos comandos en Python. Dentro del bloque Switch, aunque no location.position (X, MM) > -100: es el primer comando de Python que comprueba si la posición del robot a lo largo del eje X es mayor que -100.
El comando con sangría, wait (5, MSEC) detiene la ejecución de la comprobación durante un tiempo específico. En este ejemplo, el proyecto comprueba si la posición del robot es mayor que un valor X de -100 cada 5 MS. Esta línea de código está sangrada debajo de la primera línea de código porque este comando es el comportamiento que se repetirá hasta que se cumpla la condición (un valor de coordenada X mayor que -100).
Seleccione el botón Siguiente para continuar con el resto de esta lección.