
Leçon 2 : Conduisez au nombre « 5 »
Dans cette leçon, le robot VR conduira au nombre « 5 » et reviendra au nombre « 1 » sur le terrain de jeu de la carte de la grille numérique!

Notez que le robot VR se déplacera le long de l'axe X avec des valeurs X augmentant pour passer au nombre « 5 » sur le terrain de jeu de la carte de la grille numérique.

Le robot VR se rendra à l'emplacement du nombre « 5 » sur le terrain de jeu de la carte de la grille numérique. Cependant, avant que le robot VR puisse naviguer jusqu'à ce numéro, il faut lui dire où se trouve ce numéro. Commençant au centre de l'aire de jeux, les coordonnées du nombre « 5 » sont (-100, -900).

-
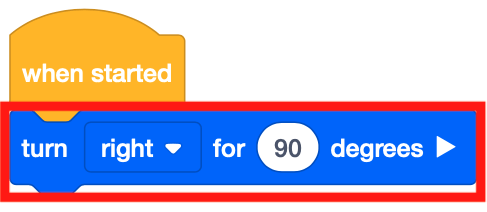
Pour commencer, le robot VR doit faire face au nombre « 5 ». Faites glisser un bloc [Turn for] vers l'espace de travail.
-
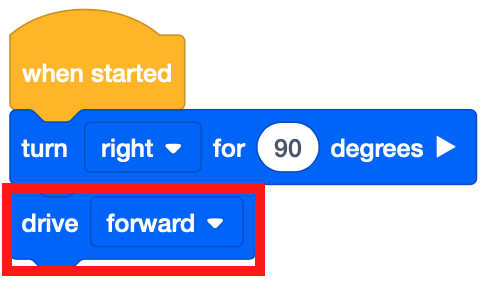
Faites glisser le bloc [Drive] sans attente dans l'espace de travail.
-
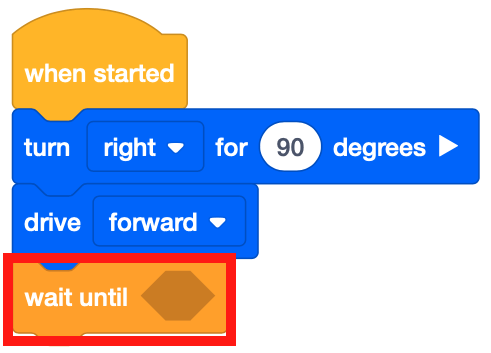
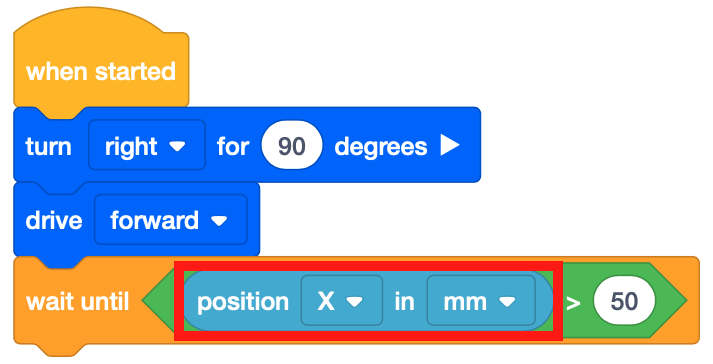
Fixez un bloc [Attendre jusqu'à] sous le bloc [Lecteur].
-
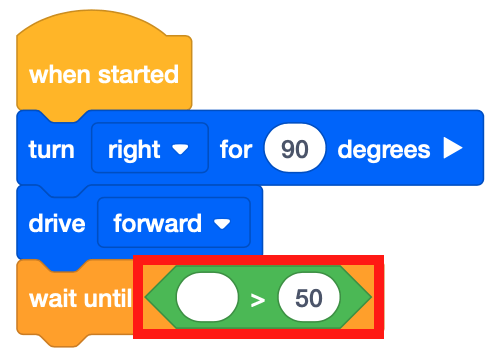
Le bloc [Attendre] accepte les conditions booléennes. Tout comme l'unité de capteur de distance, ce projet utilisera les conditionnels pour traverser le terrain de jeu de la carte à grille numérique. Faites glisser le bloc reporter <Greater than> booléen dans le bloc [Attendre].
-
Notez que le <Greater than> bloc est utilisé à la place du <Less than> bloc car le robot VR roule vers la droite à partir du côté gauche de l'aire de jeux. Le robot VR démarre à une valeur X de -900 millimètres (mm). Au fur et à mesure que le robot VR avance, les valeurs X augmentent.
-
Faites glisser le bloc (Position du robot) dans le <Greater than> bloc.
Pour votre information
Le bloc (Position du robot) est un bloc de report numérique qui rapporte la position des coordonnées X ou Y du centre du robot VR. Choisissez si la position des coordonnées X ou Y est signalée.
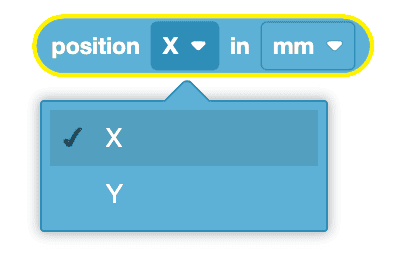
Utilisation des blocs de commutation
Il s'agit du bloc Switch (Position du robot). Pour modifier le paramètre du bloc (Position du robot) pour signaler la coordonnée Y, tapez simplement « Y » pour la valeur de la coordonnée ou sélectionnez la suggestion de coordonnée qui apparaît.

Le bloc (Position du robot) peut indiquer des valeurs en millimètres (mm) ou en pouces.
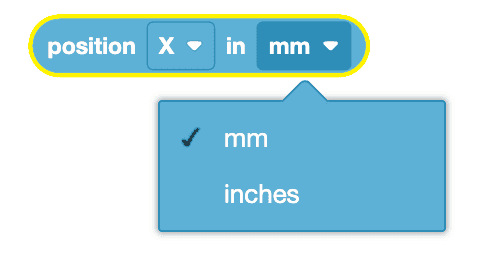
Vous pouvez modifier le paramètre de l'unité de mesure tout en utilisant le bloc Commutateur (Position du robot) en tapant simplement « POUCES » ou en sélectionnant la suggestion qui apparaît. Assurez-vous d'utiliser toutes les lettres majuscules lors de la saisie des paramètres pour les unités de mesure.
-
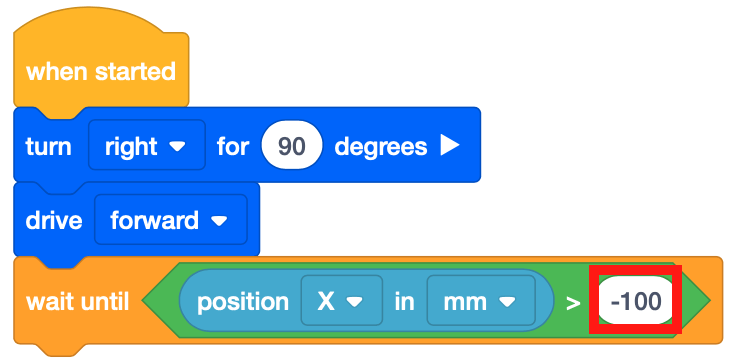
Réglez le paramètre du <Greater than> bloc sur -100.
-
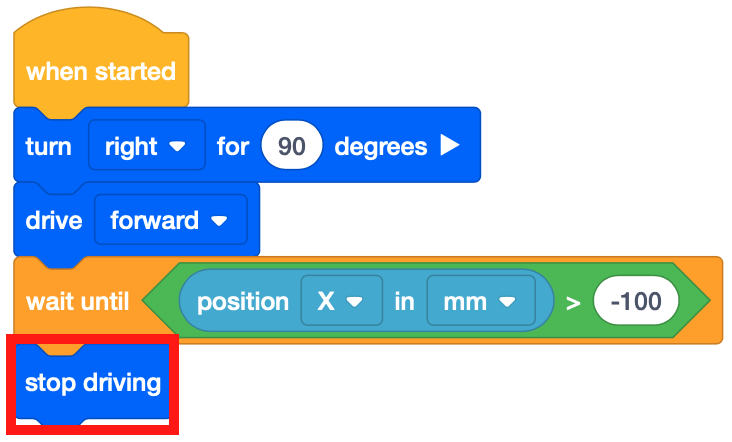
Faites glisser un bloc [Arrêter de conduire] et ajoutez-le au projet.
- Ouvrez le terrain de jeu Number Grid Map s'il n'est pas déjà ouvert et exécutez le projet.
-
Regardez le lecteur VR Robot jusqu'au numéro « 5 » sur le terrain de jeu Number Grid Map.

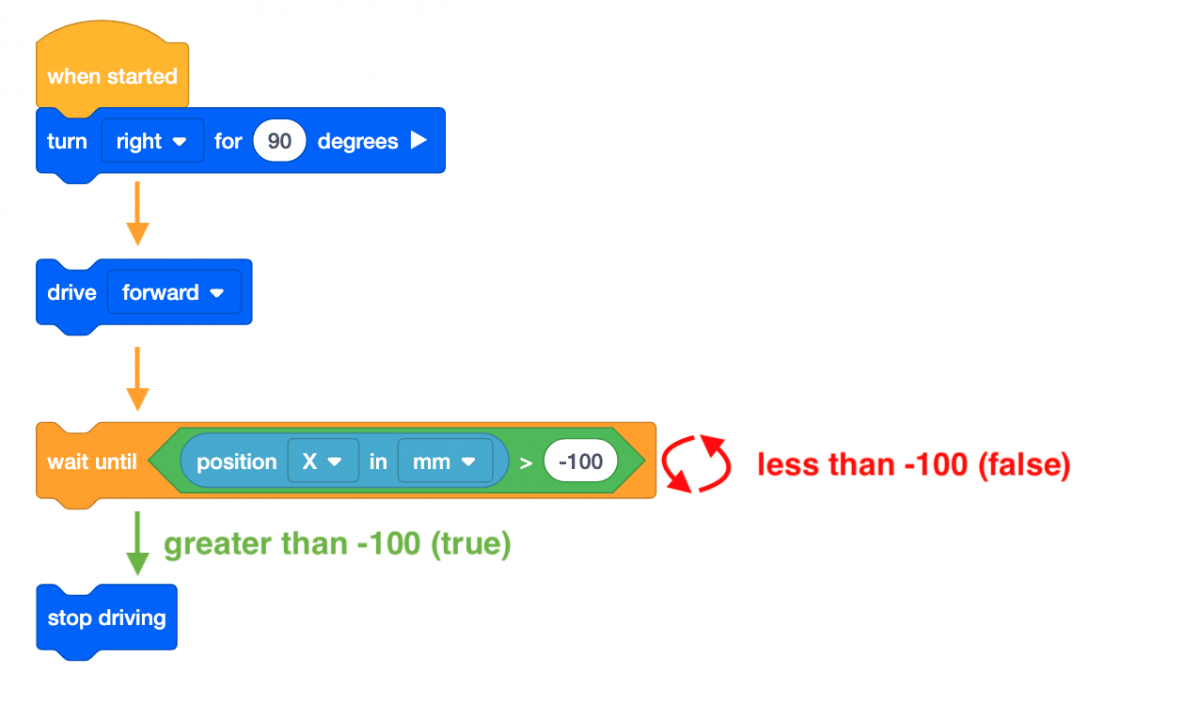
- Dans ce projet, le robot VR se dirige vers le nombre « 5 » sur le terrain de jeu de la carte de la grille numérique. Le bloc [Attendre] est utilisé pour que le robot VR continue à avancer jusqu'à ce que la valeur X soit supérieure à la valeur X de la coordonnée sur laquelle le nombre indiqué est activé.
- Une fois que la valeur X est supérieure à -100, le projet passe au bloc suivant dans la pile, qui est un bloc [Arrêter la conduite]. Étant donné que la valeur X du nombre « 5 » est -100, le robot VR cessera de conduire une fois que la valeur X sera supérieure à -100.
Utilisation des blocs de commutation
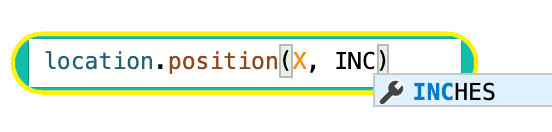
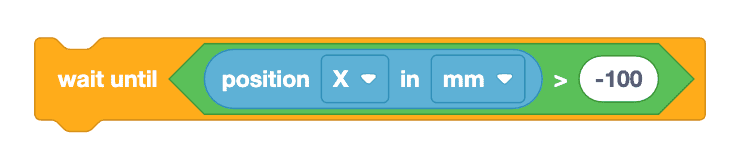
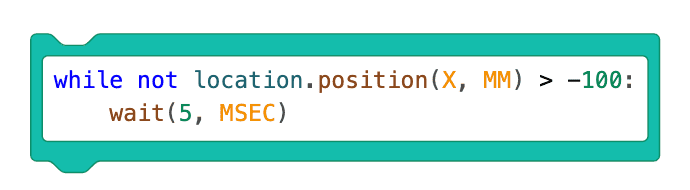
Dans cette leçon, vous avez appris à utiliser le bloc VEXcode [Attendre jusqu'à] avec une condition booléenne pour ordonner au robot d'attendre jusqu'à ce que le robot atteigne une position supérieure à -100 sur l'axe X avant de passer au comportement suivant.
L'image ci-dessous montre le bloc Switch [Wait until] avec les mêmes commandes en Python. Dans le bloc Switch, bien que non location.position(X, MM) > -100 : est la première commande Python qui vérifie si la position du robot le long de l'axe X est supérieure à -100.
La commande indentée, wait (5, MSEC) met en pause l'exécution du contrôle pendant un laps de temps spécifique. Dans cet exemple, le projet vérifie si la position du robot est supérieure ou non à une valeur X de -100 toutes les 5 MS. Cette ligne de code est mise en retrait sous la première ligne de code car cette commande est le comportement qui se répétera jusqu'à ce que la condition (une valeur de coordonnée X supérieure à -100) soit remplie.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.