
2과: 5번지까지 운전하세요
이 수업에서 VR 로봇은 번 숫자 그리드 맵 놀이터에서 숫자 '5'까지 주행하고 숫자 '1'로 돌아옵니다!

VR 로봇이 X축을 따라 이동하며 X 값이 증가하면서 숫자 그리드 맵 놀이터의 숫자 '5'로 이동합니다.

VR 로봇은 숫자 그리드 맵 놀이터에 있는 숫자 '5'의 위치로 이동합니다. 하지만 VR 로봇이 해당 번호로 이동하려면 먼저 VR 로봇에게 해당 번호의 위치가 어디인지 알려야 합니다. 놀이터 중앙에서 시작하여 숫자 '5'의 좌표는 (-100, -900)입니다.

-
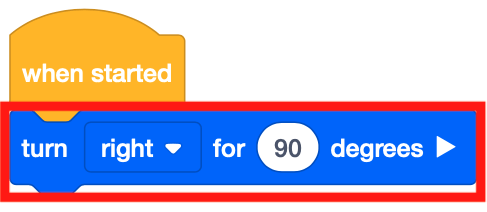
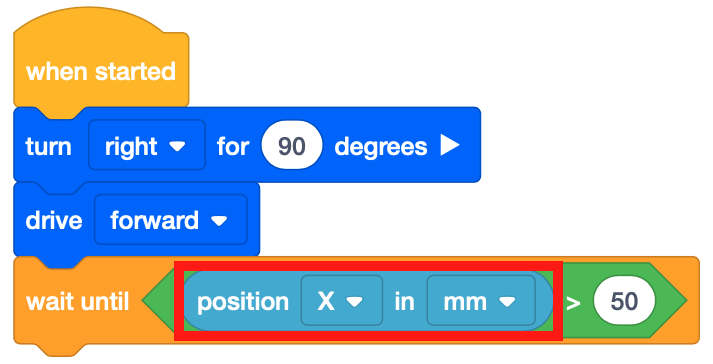
시작하려면 VR 로봇이 숫자 '5'를 마주보고 있어야 합니다. [회전] 블록을 작업 공간으로 끌어다 놓습니다.
-
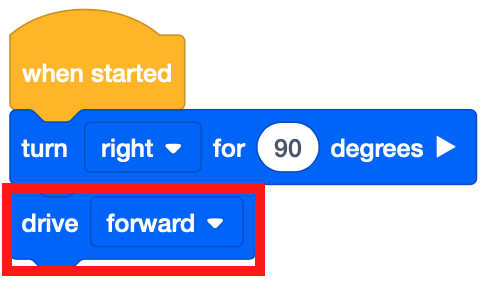
[드라이브] 대기 중이 아닌 블록을 작업 공간으로 끌어다 놓습니다.
-
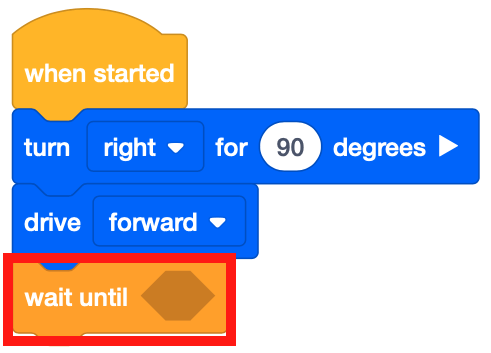
[운전] 블록 아래에 [대기] 블록을 붙입니다.
-
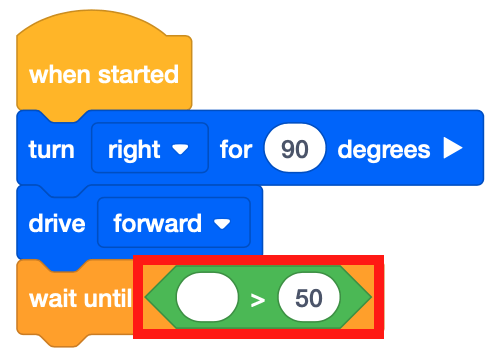
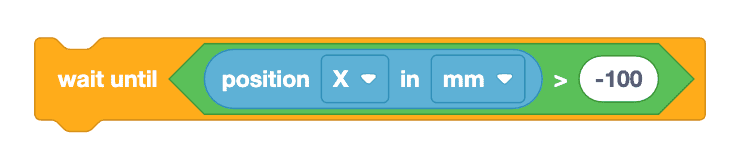
[Wait until] 블록은 부울 조건을 허용합니다. 거리 센서 장치와 마찬가지로 이 프로젝트에서는 조건을 사용하여 번호 그리드 맵 놀이터을 주행합니다. <Greater than> Boolean 리포터 블록을 [대기] 블록으로 끌어다 놓습니다.
-
VR 로봇이 놀이터의 왼쪽에서 오른쪽으로 주행하기 때문에 <Less than> 블록 대신 <Greater than> 블록이 사용됩니다. VR 로봇은 -900밀리미터(mm)의 X값에서 시작합니다. VR 로봇이 앞으로 나아갈수록 X값이 증가합니다.
-
(로봇의 위치) 블록을 <Greater than> 블록으로 끌어다 놓습니다.
귀하의 정보를 위해
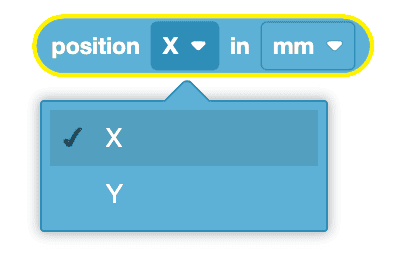
(로봇 위치) 블록은 VR 로봇 중심의 X 또는 Y 좌표 위치를 보고하는 수치 보고 블록입니다. X 또는 Y 좌표 위치를 보고할지 선택합니다.
스위치 블록 사용
이것은 스위치(로봇의 위치) 블록입니다. (로봇 위치) 블록의 매개변수를 변경하여 Y 좌표를 보고하려면 좌표 값에 "Y"를 입력하거나 표시되는 좌표 제안을 선택하면 됩니다.

(로봇 위치) 블록은 밀리미터(mm) 또는 인치로 값을 보고할 수 있습니다.
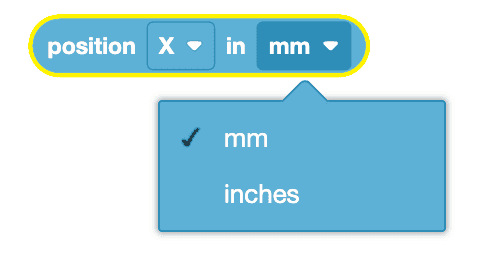
로봇 위치 전환 블록을 사용하는 동안 측정 단위에 대한 매개변수를 변경하려면 "INCHES"를 입력하거나 표시되는 제안을 선택하면 됩니다. 측정 단위의 매개변수를 입력할 때는 반드시 대문자를 사용하세요.
-
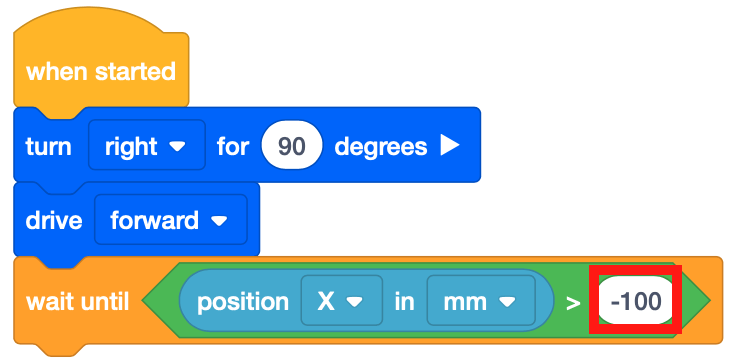
<Greater than> 블록의 매개변수를 -100으로 설정합니다.
-
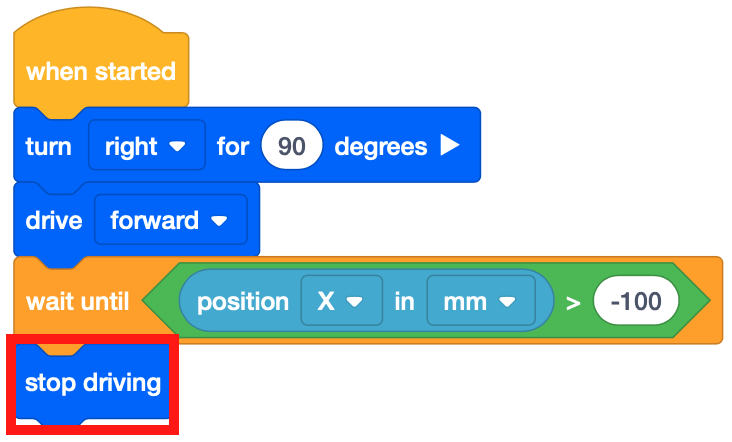
[운전 중지] 블록을 끌어서 프로젝트에 추가합니다.
- 아직 열려 있지 않으면 숫자 그리드 맵 플레이그라운드 을 열고 프로젝트를 실행합니다.
-
번호 그리드 맵 놀이터에서 VR 로봇이 숫자 '5'를 향해 주행하는 모습을 지켜보세요.

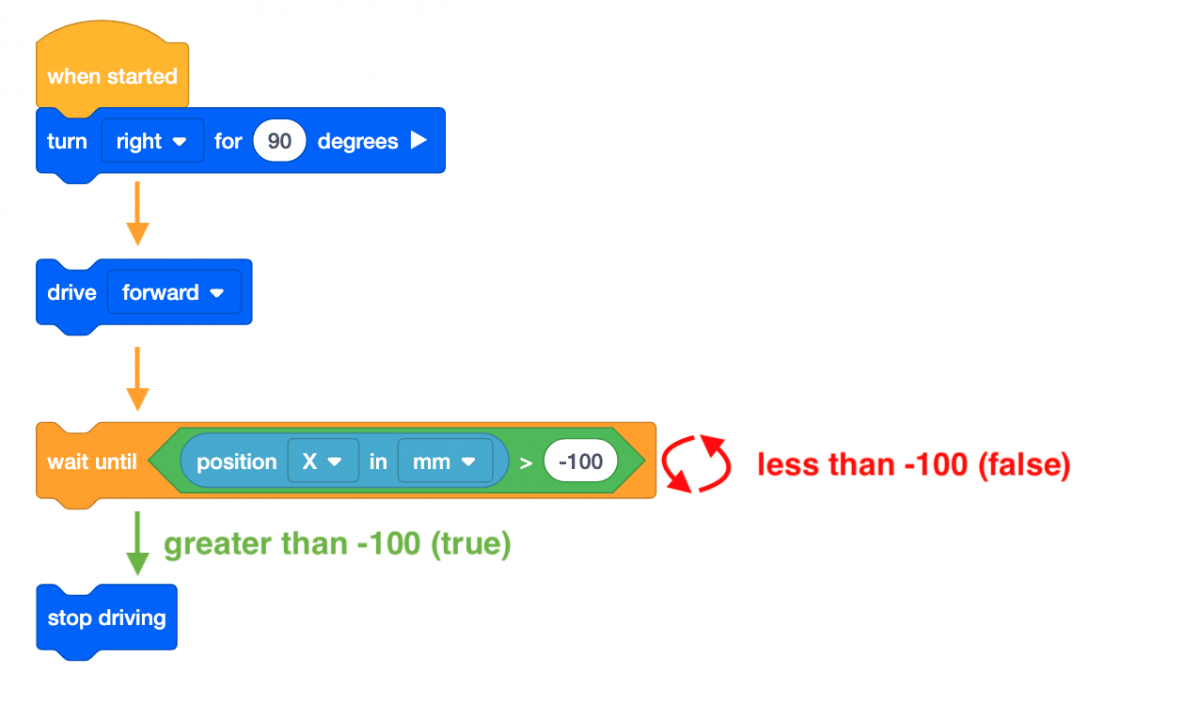
- 이 프로젝트에서 VR 로봇은 숫자 그리드 맵 놀이터의 숫자 '5'를 향해 주행합니다. [Wait until] 블록은 VR 로봇이 표시된 숫자가 있는 좌표의 X 값보다 X 값이 이상 이하가 될 때까지 계속 전진하도록 사용됩니다.
- X 값이 -100보다 커지면 프로젝트는 스택의 다음 블록, 즉 [운전 중지] 블록으로 이동합니다. 숫자 '5'의 X 값은 -100이므로, X 값이 -100보다 커지면 VR 로봇이 운전을 멈춥니다.
스위치 블록 사용
이번 수업에서는 부울 조건과 함께 VEXcode [대기까지] 블록을 사용하여 로봇이 X축에서 -100보다 큰 위치에 도달할 때까지 대기한 후 다음 동작으로 이동하도록 명령하는 방법을 배웠습니다.
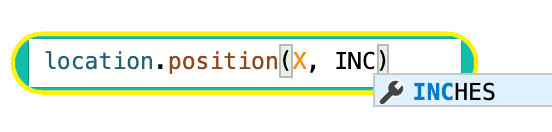
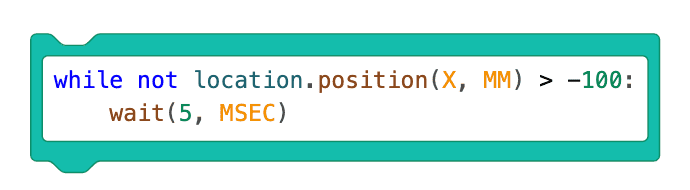
아래 이미지는 Python에서 동일한 명령을 사용한 Switch [Wait until] 블록을 보여줍니다. Switch 블록 내에서 while not location.position(X, MM) > -100: 는 로봇의 X축을 따라 위치가 -100보다 큰지 확인하는 첫 번째 Python 명령입니다.
들여쓰기된 명령어 wait (5, MSEC)특정 시간 동안 검사 실행을 일시 중지합니다. 이 예에서 프로젝트는 로봇의 위치가 5MSEC마다 X 값 -100보다 큰지 여부를 확인합니다. 이 코드 줄은 첫 번째 코드 줄 바로 아래에 들여쓰기되어 있는데, 그 이유는 이 명령이 조건(X 좌표 값이 -100보다 큰 경우)이 충족될 때까지 반복되는 동작이기 때문입니다.
이 강의의 나머지 부분을 계속하려면 다음 버튼을 선택하세요.