
Lektion 2: Fahren Sie zur Nummer ‘5’
In dieser Lektion fährt der VR-Roboter zur Nummer ‘5‘ und zurück zur Nummer ‘1‘ auf dem Number Grid Map Playground!

Beachten Sie, dass sich der VR-Roboter entlang der X-Achse bewegt, wobei die X-Werte steigen, um sich auf dem Zahlenrasterkarten-Spielplatz auf die Zahl "5" zu bewegen.

Der VR-Roboter fährt zur Position der Nummer ‘5‘ auf dem Number Grid Map Playground. Bevor der VR-Roboter jedoch zu dieser Nummer navigieren kann, muss dem VR-Roboter mitgeteilt werden, wo sich diese Nummer befindet. Beginnend in der Mitte des Spielplatzes sind die Koordinaten der Zahl ‘5’ (-100, -900).

-
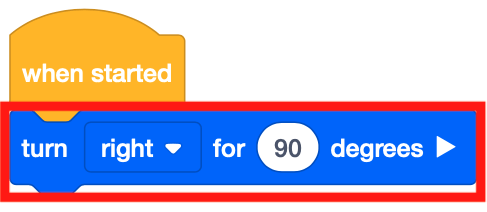
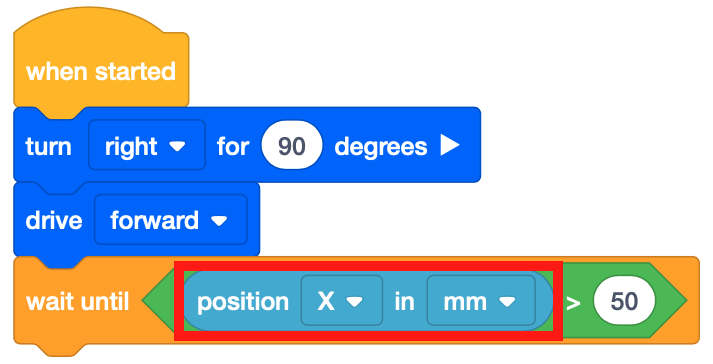
Um zu beginnen, muss der VR-Roboter der Zahl "5" gegenüberstehen. Ziehen Sie einen [Turn for] -Block in den Arbeitsbereich.
-
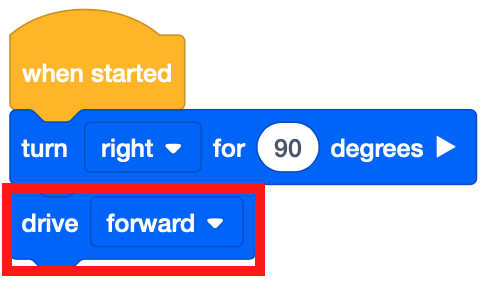
Ziehen Sie den Block [Drive] non-waiting in den Arbeitsbereich.
-
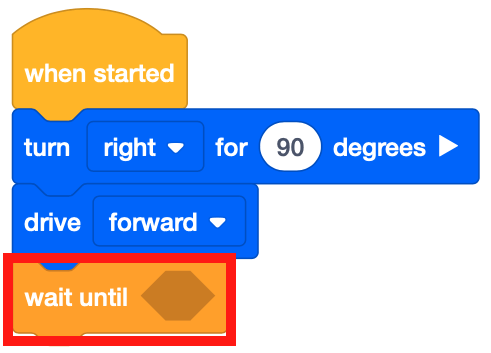
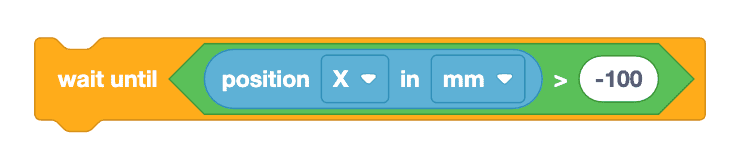
Bringen Sie einen [Warten bis] -Block unter dem [Laufwerk] -Block an.
-
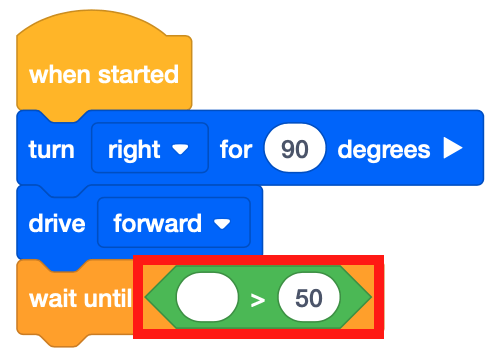
Der Block [Warten bis] akzeptiert boolesche Bedingungen. Genau wie die Abstandssensoreinheit wird dieses Projekt die Bedingungszeichen verwenden, um durch den Number Grid Map Playground zu fahren. Ziehen Sie den <Greater than> Booleschen Reporterblock in den Block [Warten bis].
-
Beachten Sie, dass der <Greater than> Block anstelle des <Less than> Blocks verwendet wird, da der VR-Roboter von der linken Seite des Spielplatzes nach rechts fährt. Der VR-Roboter startet bei einem X-Wert von -900 Millimetern (mm). Wenn der VR-Roboter vorwärts fährt, steigen die X-Werte.
-
Ziehen Sie den Block (Position des Roboters) in den <Greater than> Block.
Zur Kenntnisnahme
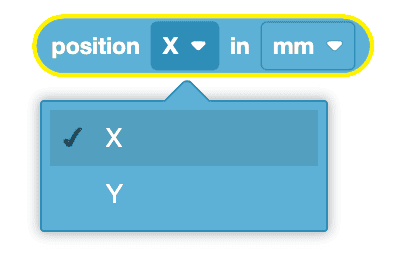
Der (Position des Roboters) -Block ist ein numerischer Melderblock, der die X- oder Y-Koordinatenposition der Mitte des VR-Roboters meldet. Wählen Sie, ob die X- oder Y-Koordinatenposition gemeldet wird.
Verwenden von Schalterblöcken
Dies ist der Schalter (Position des Roboters) -Block. Um den Parameter des Blocks (Position des Roboters) zu ändern, um die Y-Koordinate zu melden, geben Sie einfach "Y" für den Koordinatenwert ein oder wählen Sie den Koordinatenvorschlag aus, der angezeigt wird.

Der Block (Position des Roboters) kann Werte in Millimetern (mm) oder Zoll melden.
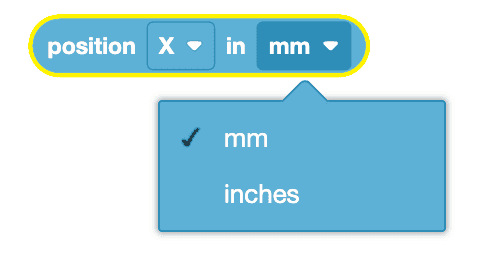
Sie können den Parameter für die Maßeinheit ändern, während Sie den Block Schalter (Position des Roboters) verwenden, indem Sie einfach "ZOLL" eingeben oder den angezeigten Vorschlag auswählen. Achten Sie darauf, bei der Eingabe von Parametern für Maßeinheiten alle Großbuchstaben zu verwenden.
-
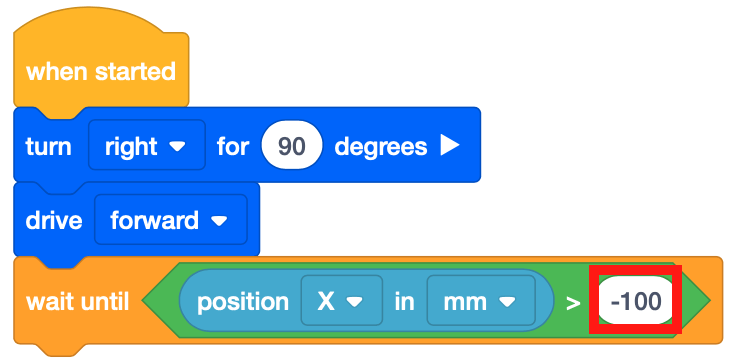
Setzen Sie den Parameter des <Greater than> Blocks auf -100.
-
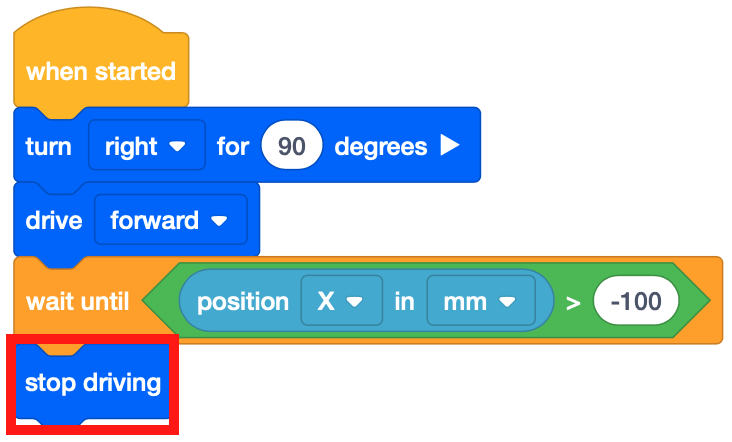
Ziehen Sie einen [Stop driving] -Block ein und fügen Sie ihn dem Projekt hinzu.
- Öffnen Sie den Number Grid Map Playground , wenn er noch nicht geöffnet ist, und führen Sie das Projekt aus.
-
Beobachten Sie, wie der VR-Roboter auf dem Number Grid Map Playground zur Nummer „5“ fährt.

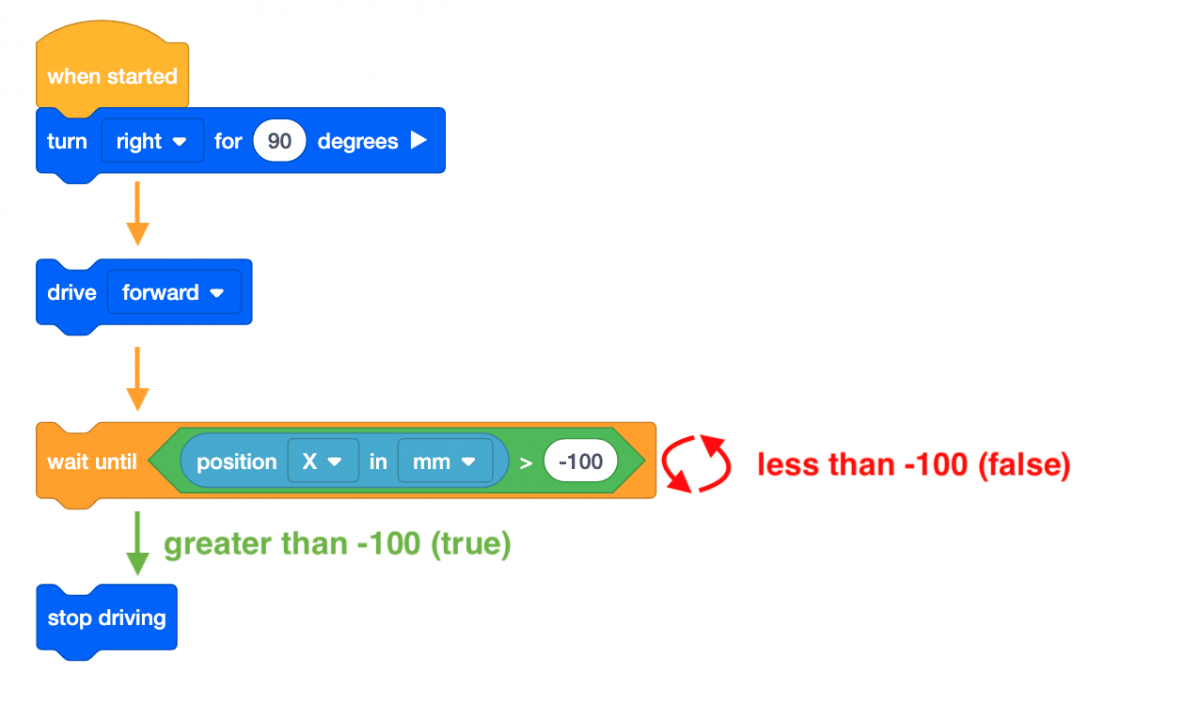
- In diesem Projekt fährt der VR-Roboter zur Nummer ‘5‘ auf dem Number Grid Map Playground. Der Block [Warten bis] wird verwendet, damit der VR-Roboter weiter vorwärts fährt, bis der X-Wert größer als der X-Wert der Koordinate ist, auf der die angegebene Zahl steht.
- Sobald der X-Wert größer als -100 ist, wechselt das Projekt zum nächsten Block im Stapel, der ein [Stop driving] -Block ist. Da der X-Wert der Zahl ‘5‘ -100 ist, hört der VR-Roboter auf zu fahren, sobald der X-Wert größer als -100 ist.
Verwenden von Schalterblöcken
In dieser Lektion haben Sie gelernt, wie Sie den Block VEXcode [Warten bis] mit einer booleschen Bedingung verwenden, um dem Roboter zu befehlen, zu warten, bis der Roboter eine Position von mehr als -100 auf der X-Achse erreicht, bevor Sie zum nächsten Verhalten übergehen.
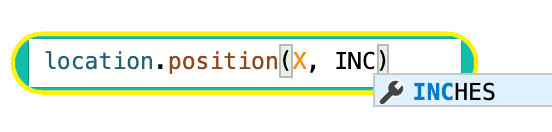
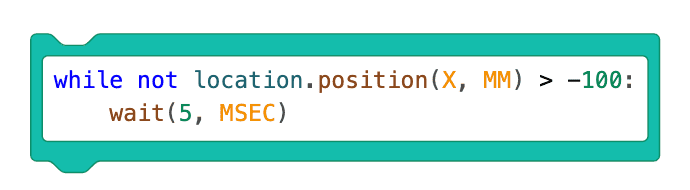
Die folgende Abbildung zeigt den Block Switch [Wait until] mit den gleichen Befehlen in Python. Innerhalb des Switch-Blocks, obwohl nicht location.position (X, MM) > -100: ist der erste Python-Befehl, der überprüft, ob die Position des Roboters entlang der X-Achse größer als -100 ist.
Der eingerückte Befehl wait (5, MS) unterbricht die Ausführung der Prüfung für eine bestimmte Zeit. In diesem Beispiel prüft das Projekt alle 5 MS, ob die Position des Roboters größer als ein X-Wert von -100 ist. Diese Codezeile wird unter der ersten Codezeile eingerückt, da dieser Befehl das Verhalten ist, das wiederholt wird, bis die Bedingung (ein X-Koordinatenwert von größer als -100) erfüllt ist.
Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.