
पाठ 2: नंबर '5' तक ड्राइव करें
इस पाठ में, वीआर रोबोट नंबर ग्रिड मैप प्लेग्राउंडपर नंबर '5' तक जाएगा और वापस नंबर '1' पर आएगा!

ध्यान दें कि वीआर रोबोट एक्स अक्ष के साथ यात्रा करेगा, जिसमें एक्स मान नंबर ग्रिड मैप प्लेग्राउंडपर संख्या '5' तक बढ़ने के लिए बढ़ रहा है।

वीआर रोबोट नंबर ग्रिड मैप प्लेग्राउंडपर नंबर '5' के स्थान पर ड्राइव करेगा। हालाँकि, इससे पहले कि वीआर रोबोट उस नंबर तक पहुंच सके, वीआर रोबोट को यह बताना होगा कि वह नंबर कहां है। खेल के मैदान के केंद्र से शुरू होकर, संख्या '5' के निर्देशांक (-100, -900) हैं।

-
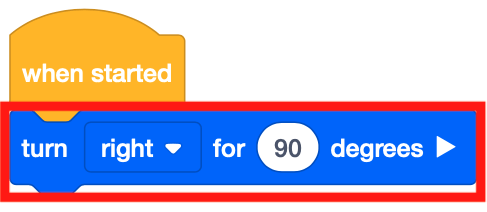
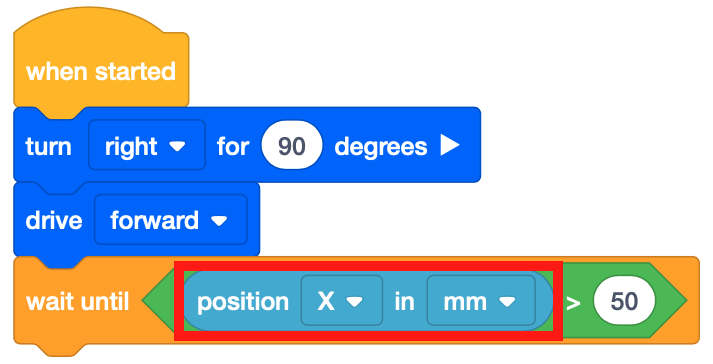
शुरुआत करने के लिए, वीआर रोबोट का मुंह संख्या '5' की ओर होना चाहिए। [Turn for] ब्लॉक को कार्यक्षेत्र में खींचें.
-
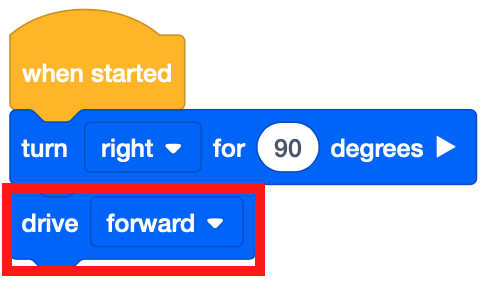
[ड्राइव] नॉन-वेटिंग ब्लॉक को कार्यक्षेत्र में खींचें.
-
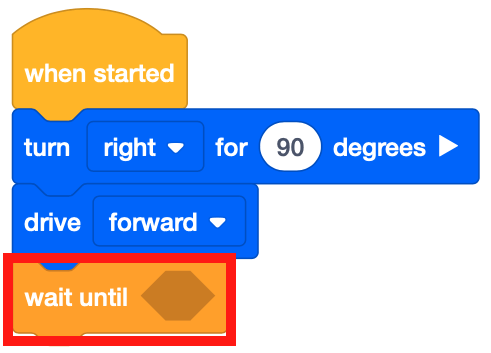
[ड्राइव] ब्लॉक के नीचे [प्रतीक्षा करें] ब्लॉक संलग्न करें।
-
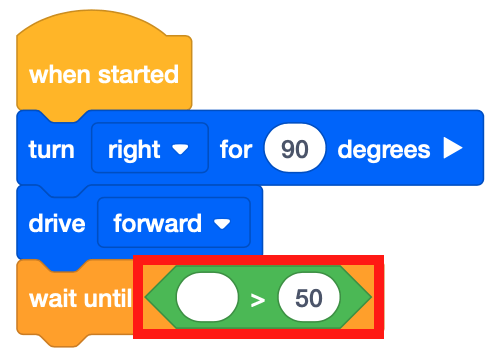
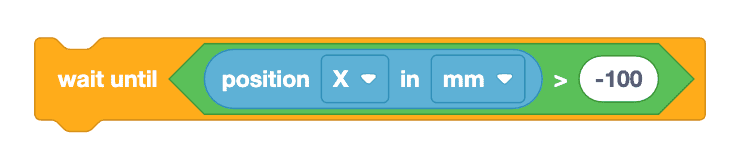
[Wait until] ब्लॉक बूलियन शर्तों को स्वीकार करता है। डिस्टेंस सेंसर यूनिट की तरह, यह परियोजना नंबर ग्रिड मैप प्लेग्राउंडके माध्यम से ड्राइव करने के लिए सशर्त का उपयोग करेगी। <Greater than> बूलियन रिपोर्टर ब्लॉक को [Wait until] ब्लॉक में खींचें.
-
ध्यान दें कि <Less than> ब्लॉक के स्थान पर <Greater than> ब्लॉक का उपयोग किया गया है क्योंकि VR रोबोट खेल के मैदान के बाईं ओर से दाईं ओर जा रहा है। वीआर रोबोट -900 मिलीमीटर (मिमी) के एक्स-मान से शुरू हो रहा है। जैसे-जैसे वीआर रोबोट आगे बढ़ता है, एक्स-मान बढ़ता जाता है।
-
(रोबोट की स्थिति) ब्लॉक को <Greater than> ब्लॉक में खींचें।
आपकी जानकारी के लिए
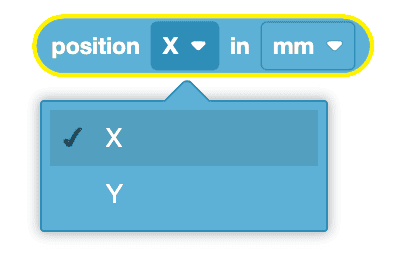
(रोबोट की स्थिति) ब्लॉक एक संख्यात्मक रिपोर्टर ब्लॉक है जो वीआर रोबोट के केंद्र की एक्स या वाई निर्देशांक स्थिति की रिपोर्ट करता है। चुनें कि X या Y निर्देशांक स्थिति की रिपोर्ट की जाए।
स्विच ब्लॉक का उपयोग करना
यह स्विच (रोबोट की स्थिति) ब्लॉक है। Y निर्देशांक की रिपोर्ट करने के लिए (रोबोट की स्थिति) ब्लॉक के पैरामीटर को बदलने के लिए, निर्देशांक मान के लिए बस "Y" टाइप करें या दिखाई देने वाले निर्देशांक सुझाव का चयन करें।

(रोबोट की स्थिति) ब्लॉक मिलीमीटर (मिमी) या इंच में मान रिपोर्ट कर सकता है।
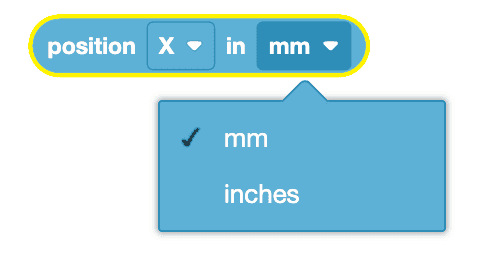
आप स्विच (रोबोट की स्थिति) ब्लॉक का उपयोग करते समय माप की इकाई के लिए पैरामीटर को केवल "इंच" टाइप करके या दिखाई देने वाले सुझाव का चयन करके बदल सकते हैं। माप की इकाइयों के लिए पैरामीटर टाइप करते समय सभी बड़े अक्षरों का उपयोग करना सुनिश्चित करें।
-
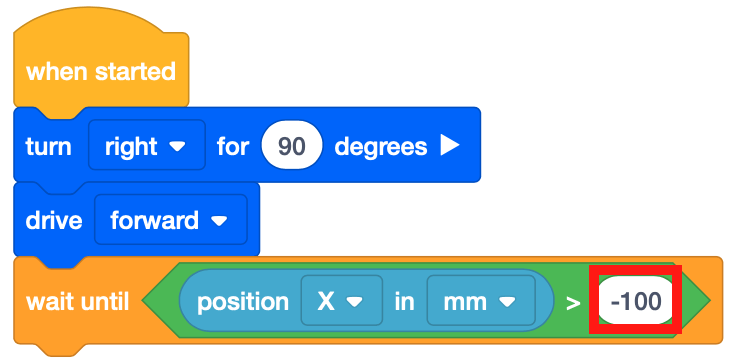
<Greater than> ब्लॉक के पैरामीटर को -100 पर सेट करें।
-
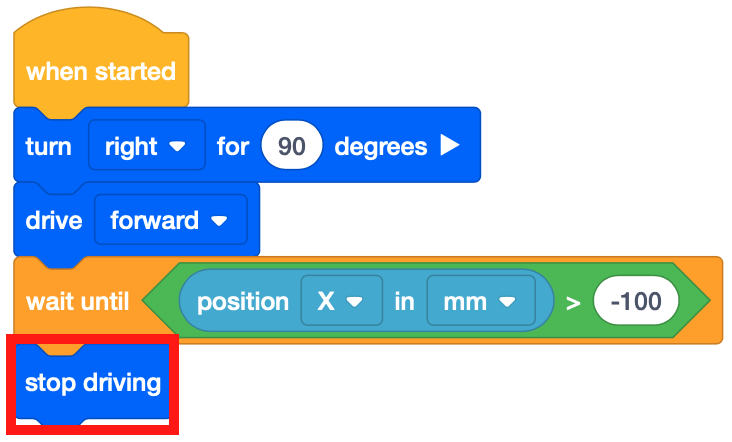
[ड्राइविंग रोकें] ब्लॉक को खींचें और उसे प्रोजेक्ट में जोड़ें.
- यदि नंबर ग्रिड मैप प्लेग्राउंड पहले से खुला नहीं है तो उसे खोलें और प्रोजेक्ट चलाएं।
-
नंबर ग्रिड मानचित्र खेल के मैदानपर नंबर '5' के लिए वी.आर. रोबोट ड्राइव देखें।

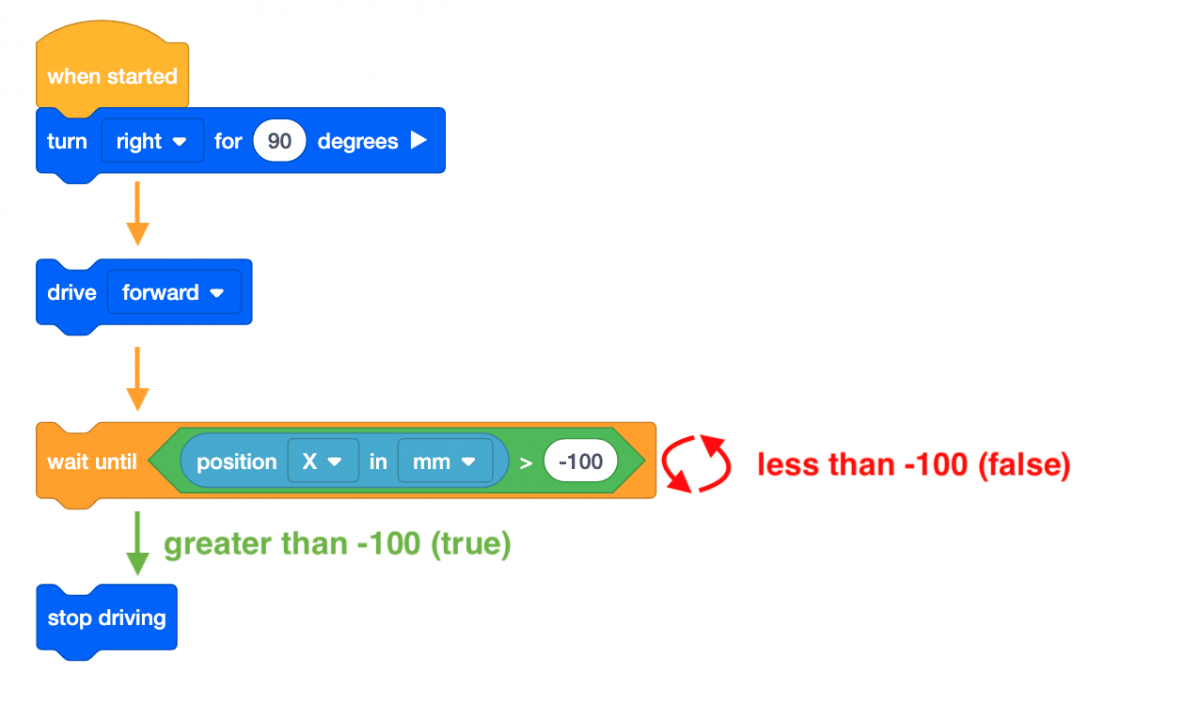
- इस परियोजना में, वीआर रोबोट नंबर ग्रिड मैप प्लेग्राउंडपर नंबर '5' तक ड्राइव करता है। [Wait until] ब्लॉक का उपयोग इसलिए किया जाता है ताकि VR रोबोट तब तक आगे बढ़ता रहे जब तक कि X-मान उस निर्देशांक के X-मान से या अधिक न हो जाए जिस पर संकेतित संख्या है।
- एक बार जब X-मान -100 से अधिक हो जाता है, तो प्रोजेक्ट स्टैक में अगले ब्लॉक पर चला जाता है, जो कि [ड्राइविंग रोकें] ब्लॉक है। चूंकि संख्या '5' का X-मान -100 है, इसलिए X-मान -100 से अधिक होने पर VR रोबोट गाड़ी चलाना बंद कर देगा।
स्विच ब्लॉक का उपयोग करना
इस पाठ में, आपने सीखा कि बूलियन शर्त के साथ VEXcode [Wait until] ब्लॉक का उपयोग कैसे करें ताकि रोबोट को अगले व्यवहार पर जाने से पहले X-अक्ष पर -100 से अधिक की स्थिति तक पहुंचने तक प्रतीक्षा करने का आदेश दिया जा सके।
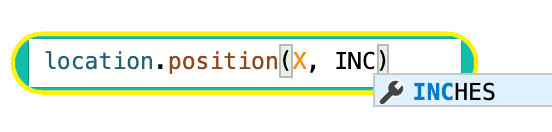
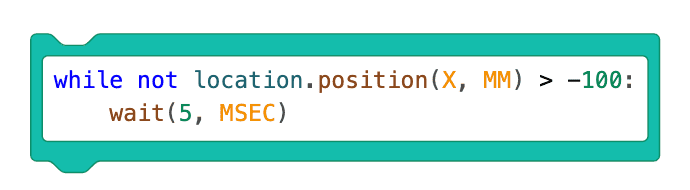
नीचे दी गई छवि पायथन में समान कमांड के साथ स्विच [वेट अन्टिल] ब्लॉक को दिखाती है। स्विच ब्लॉक के भीतर, while not location.position(X, MM) > -100: पहला पायथन कमांड है जो यह जांचता है कि X-अक्ष के साथ रोबोट की स्थिति -100 से अधिक है या नहीं।
इंडेंटेड कमांड, wait (5, MSEC)एक विशिष्ट समय के लिए चेक के निष्पादन को रोक देता है। इस उदाहरण में, परियोजना यह जांचती है कि रोबोट की स्थिति प्रत्येक 5 MSEC पर -100 के X मान से अधिक है या नहीं। कोड की यह पंक्ति कोड की पहली पंक्ति के नीचे इंडेंट की गई है, क्योंकि यह कमांड वह व्यवहार है जो तब तक दोहराया जाएगा जब तक कि शर्त (-100 से अधिक का X निर्देशांक मान) पूरी नहीं हो जाती।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।