
പാഠം 2: '5' എന്ന നമ്പറിലേക്ക് ഡ്രൈവ് ചെയ്യുക
ഈ പാഠത്തിൽ, VR റോബോട്ട് '5' എന്ന നമ്പറിലേക്ക് ഡ്രൈവ് ചെയ്ത് നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ട്ലെ '1' എന്ന നമ്പറിലേക്ക് തിരികെ പോകും!

ശ്രദ്ധിക്കുക, നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ട്ലെ '5' എന്ന നമ്പറിലേക്ക് നീങ്ങുന്നതിന് X മൂല്യങ്ങൾ വർദ്ധിച്ചുകൊണ്ട് VR റോബോട്ട് X അച്ചുതണ്ടിലൂടെ സഞ്ചരിക്കും.

നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ട്ലെ '5' എന്ന നമ്പറിന്റെ സ്ഥാനത്തേക്ക് VR റോബോട്ട് ഡ്രൈവ് ചെയ്യും. എന്നിരുന്നാലും, വിആർ റോബോട്ടിന് ആ നമ്പറിലേക്ക് നാവിഗേറ്റ് ചെയ്യാൻ കഴിയുന്നതിന് മുമ്പ്, ആ നമ്പറിന്റെ സ്ഥാനം എവിടെയാണെന്ന് വിആർ റോബോട്ടിനോട് പറയേണ്ടതുണ്ട്. കളിസ്ഥലത്തിന്റെ മധ്യത്തിൽ തുടങ്ങി, '5' എന്ന സംഖ്യയുടെ കോർഡിനേറ്റുകൾ (-100, -900) ആണ്.

-
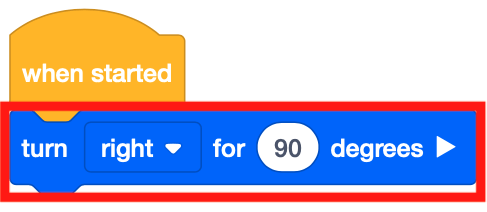
ആരംഭിക്കുന്നതിന്, വിആർ റോബോട്ട് '5' എന്ന സംഖ്യയ്ക്ക് അഭിമുഖമായിരിക്കണം. വർക്ക്സ്പെയ്സിലേക്ക് ഒരു [ടേൺ ഫോർ] ബ്ലോക്ക് വലിച്ചിടുക.
-
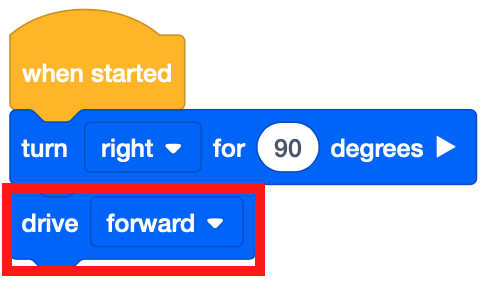
[ഡ്രൈവ്] നോൺ-വെയ്റ്റിംഗ് ബ്ലോക്ക് വർക്ക്സ്പെയ്സിലേക്ക് വലിച്ചിടുക.
-
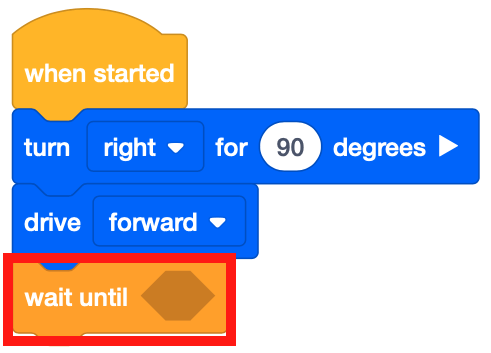
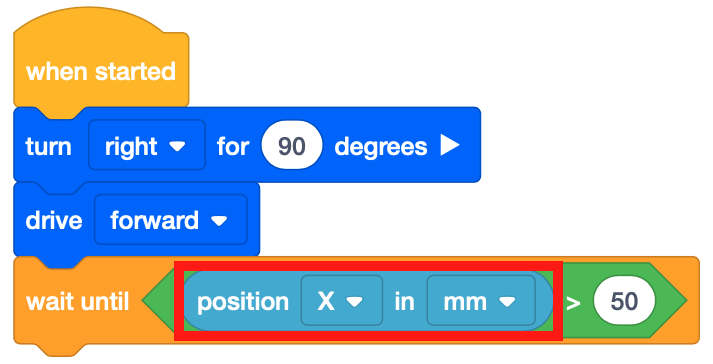
[ഡ്രൈവ്] ബ്ലോക്കിന് താഴെ ഒരു [വരെ കാത്തിരിക്കുക] ബ്ലോക്ക് അറ്റാച്ചുചെയ്യുക.
-
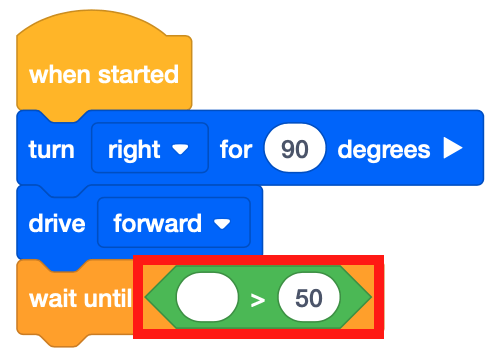
[Wait until] ബ്ലോക്ക് ബൂളിയൻ വ്യവസ്ഥകൾ അംഗീകരിക്കുന്നു. ഡിസ്റ്റൻസ് സെൻസർ യൂണിറ്റ് പോലെ തന്നെ, ഈ പ്രോജക്റ്റ് നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ട്ലൂടെ ഡ്രൈവ് ചെയ്യുന്നതിന് കണ്ടീഷനലുകൾ ഉപയോഗിക്കും. <Greater than> ബൂളിയൻ റിപ്പോർട്ടർ ബ്ലോക്ക് [Wait until] ബ്ലോക്കിലേക്ക് വലിച്ചിടുക.
-
VR റോബോട്ട് പ്ലേഗ്രൗണ്ടിന്റെ ഇടതുവശത്ത് നിന്ന് വലതുവശത്തേക്ക് ഓടിക്കുന്നതിനാൽ <Less than> ബ്ലോക്കിന് പകരം <Greater than> ബ്ലോക്ക് ഉപയോഗിച്ചിരിക്കുന്നു എന്നത് ശ്രദ്ധിക്കുക. VR റോബോട്ട് -900 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) എന്ന X-മൂല്യത്തിൽ നിന്നാണ് ആരംഭിക്കുന്നത്. വിആർ റോബോട്ട് മുന്നോട്ട് പോകുമ്പോൾ, എക്സ്-മൂല്യങ്ങൾ വർദ്ധിക്കുന്നു.
-
(റോബോട്ടിന്റെ സ്ഥാനം) ബ്ലോക്ക് <Greater than> ബ്ലോക്കിലേക്ക് വലിച്ചിടുക.
നിങ്ങളുടെ അറിവിലേക്കായി
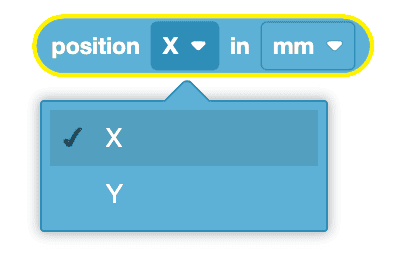
(റോബോട്ടിന്റെ സ്ഥാനം) ബ്ലോക്ക് എന്നത് VR റോബോട്ടിന്റെ മധ്യഭാഗത്തെ X അല്ലെങ്കിൽ Y കോർഡിനേറ്റ് സ്ഥാനം റിപ്പോർട്ട് ചെയ്യുന്ന ഒരു സംഖ്യാ റിപ്പോർട്ടർ ബ്ലോക്കാണ്. X അല്ലെങ്കിൽ Y കോർഡിനേറ്റ് സ്ഥാനം റിപ്പോർട്ട് ചെയ്തിട്ടുണ്ടോ എന്ന് തിരഞ്ഞെടുക്കുക.
സ്വിച്ച് ബ്ലോക്കുകൾ ഉപയോഗിക്കുന്നു
ഇതാണ് സ്വിച്ച് (റോബോട്ടിന്റെ സ്ഥാനം) ബ്ലോക്ക്. Y കോർഡിനേറ്റ് റിപ്പോർട്ട് ചെയ്യുന്നതിനായി (റോബോട്ട് സ്ഥാനം) ബ്ലോക്കിന്റെ പാരാമീറ്റർ മാറ്റാൻ, കോർഡിനേറ്റ് മൂല്യത്തിനായി "Y" എന്ന് ടൈപ്പ് ചെയ്യുക അല്ലെങ്കിൽ ദൃശ്യമാകുന്ന കോർഡിനേറ്റ് നിർദ്ദേശം തിരഞ്ഞെടുക്കുക.

(റോബോട്ടിന്റെ സ്ഥാനം) ബ്ലോക്കിന് മില്ലിമീറ്ററിലോ (മില്ലീമീറ്റർ) ഇഞ്ചിലോ മൂല്യങ്ങൾ റിപ്പോർട്ട് ചെയ്യാൻ കഴിയും.
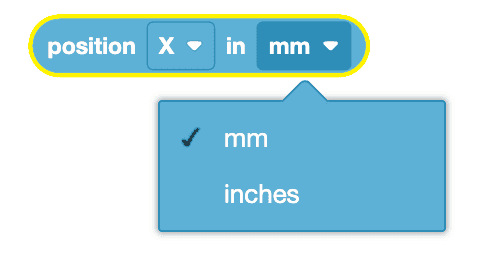
സ്വിച്ച് (റോബോട്ടിന്റെ സ്ഥാനം) ബ്ലോക്ക് ഉപയോഗിക്കുമ്പോൾ "ഇഞ്ചുകൾ" എന്ന് ടൈപ്പ് ചെയ്തോ ദൃശ്യമാകുന്ന നിർദ്ദേശം തിരഞ്ഞെടുത്തോ നിങ്ങൾക്ക് അളവിന്റെ യൂണിറ്റിനായുള്ള പാരാമീറ്റർ മാറ്റാൻ കഴിയും. അളവെടുപ്പ് യൂണിറ്റുകൾക്കായി പാരാമീറ്ററുകൾ ടൈപ്പ് ചെയ്യുമ്പോൾ എല്ലാ വലിയ അക്ഷരങ്ങളും ഉപയോഗിക്കുന്നത് ഉറപ്പാക്കുക.
-
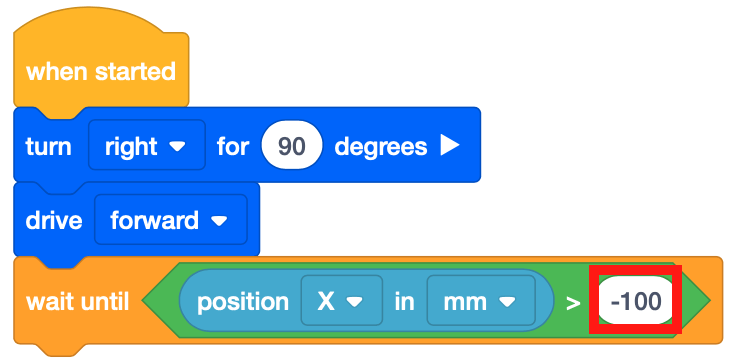
<Greater than> ബ്ലോക്കിന്റെ പാരാമീറ്റർ -100 ആയി സജ്ജമാക്കുക.
-
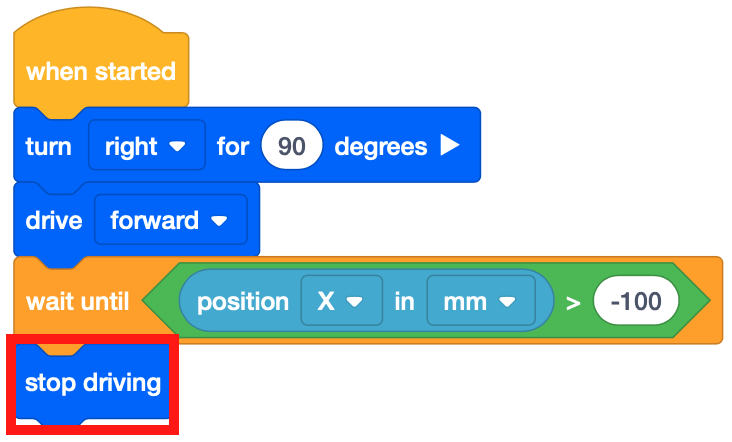
ഒരു [സ്റ്റോപ്പ് ഡ്രൈവിംഗ്] ബ്ലോക്ക് ഡ്രാഗ് ചെയ്ത് പ്രോജക്റ്റിലേക്ക് ചേർക്കുക.
- നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ട് തുറന്നിട്ടില്ലെങ്കിൽ അത് തുറന്ന് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
-
നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ട്ൽ '5' എന്ന നമ്പറിലേക്ക് VR റോബോട്ട് ഡ്രൈവ് ചെയ്യുന്നത് കാണുക.

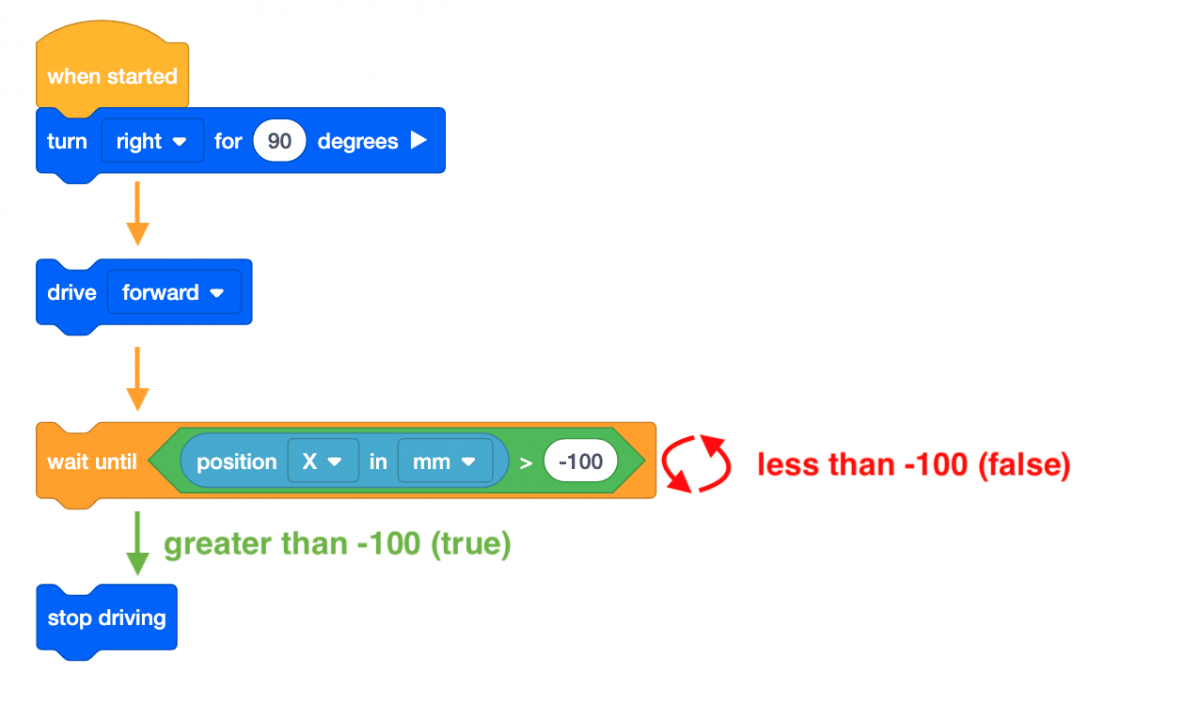
- ഈ പ്രോജക്റ്റിൽ, VR റോബോട്ട് നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ട്ലെ '5' എന്ന നമ്പറിലേക്ക് ഡ്രൈവ് ചെയ്യുന്നു. [Wait until] ബ്ലോക്ക് ഉപയോഗിച്ചിരിക്കുന്നതിനാൽ, X-മൂല്യം സൂചിപ്പിച്ചിരിക്കുന്ന സംഖ്യ ഓണായിരിക്കുന്ന കോർഡിനേറ്റിന്റെ X-മൂല്യത്തേക്കാൾ VR റോബോട്ട് മുന്നോട്ട് നീങ്ങുന്നത് തുടരും.
- X-മൂല്യം -100-ൽ കൂടുതലായാൽ, പ്രോജക്റ്റ് സ്റ്റാക്കിലെ അടുത്ത ബ്ലോക്കിലേക്ക് നീങ്ങുന്നു, അത് [സ്റ്റോപ്പ് ഡ്രൈവിംഗ്] ബ്ലോക്കാണ്. '5' എന്ന സംഖ്യയുടെ X- മൂല്യം -100 ആയതിനാൽ, X- മൂല്യം -100-ൽ കൂടുതലാകുമ്പോൾ VR റോബോട്ട് ഡ്രൈവിംഗ് നിർത്തും.
സ്വിച്ച് ബ്ലോക്കുകൾ ഉപയോഗിക്കുന്നു
ഈ പാഠത്തിൽ, അടുത്ത പെരുമാറ്റത്തിലേക്ക് നീങ്ങുന്നതിന് മുമ്പ്, റോബോട്ട് X-അക്ഷത്തിൽ -100-ൽ കൂടുതൽ സ്ഥാനത്ത് എത്തുന്നതുവരെ കാത്തിരിക്കാൻ റോബോട്ടിനോട് കമാൻഡ് ചെയ്യുന്നതിന് ബൂളിയൻ അവസ്ഥയുള്ള VEXcode [Wait until] ബ്ലോക്ക് എങ്ങനെ ഉപയോഗിക്കാമെന്ന് നിങ്ങൾ പഠിച്ചു.
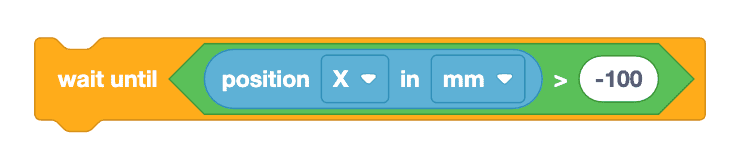
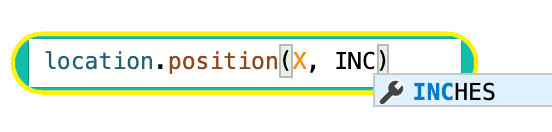
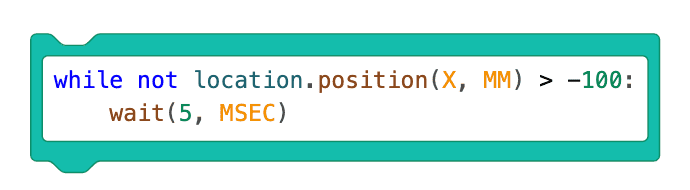
താഴെയുള്ള ചിത്രത്തിൽ പൈത്തണിലെ അതേ കമാൻഡുകളുള്ള Switch [Wait until] ബ്ലോക്ക് കാണിക്കുന്നു. സ്വിച്ച് ബ്ലോക്കിനുള്ളിൽ, location.position(X, MM) അല്ലെങ്കിലും ആണ് > -100: എന്നത് X-അക്ഷത്തിൽ റോബോട്ടിന്റെ സ്ഥാനം -100 നേക്കാൾ വലുതാണോ എന്ന് പരിശോധിക്കുന്ന ആദ്യത്തെ പൈത്തൺ കമാൻഡ് ആണ്.
ഇൻഡന്റ് ചെയ്ത കമാൻഡ്, wait (5, MSEC)ഒരു നിശ്ചിത സമയത്തേക്ക് പരിശോധനയുടെ നിർവ്വഹണം താൽക്കാലികമായി നിർത്തുന്നു. ഈ ഉദാഹരണത്തിൽ, ഓരോ 5 MSec-ലും റോബോട്ടിന്റെ സ്ഥാനം -100 എന്ന X മൂല്യത്തിൽ കൂടുതലാണോ എന്ന് പ്രോജക്റ്റ് പരിശോധിക്കുന്നു. ഈ കോഡ് വരി കോഡിന്റെ ആദ്യ വരിയുടെ അടിയിൽ ഇൻഡന്റ് ചെയ്തിരിക്കുന്നു, കാരണം ഈ കമാൻഡ് അവസ്ഥ (-100-ൽ കൂടുതലുള്ള ഒരു X കോർഡിനേറ്റ് മൂല്യം) പാലിക്കുന്നതുവരെ ആവർത്തിക്കുന്ന സ്വഭാവമാണ്.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.