
পাঠ ৩: '১' নম্বরে গাড়ি চালাও
- VR রোবটটিকে তার শুরুর অবস্থানে ফিরিয়ে আনতে খেলার মাঠটি পুনরায় সেট করুন।
-
এখন, VR রোবটটি ঘুরে দাঁড়াবে এবং নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড-এ '31' নম্বরে পৌঁছালে '1' নম্বরে ফিরে আসবে।
-
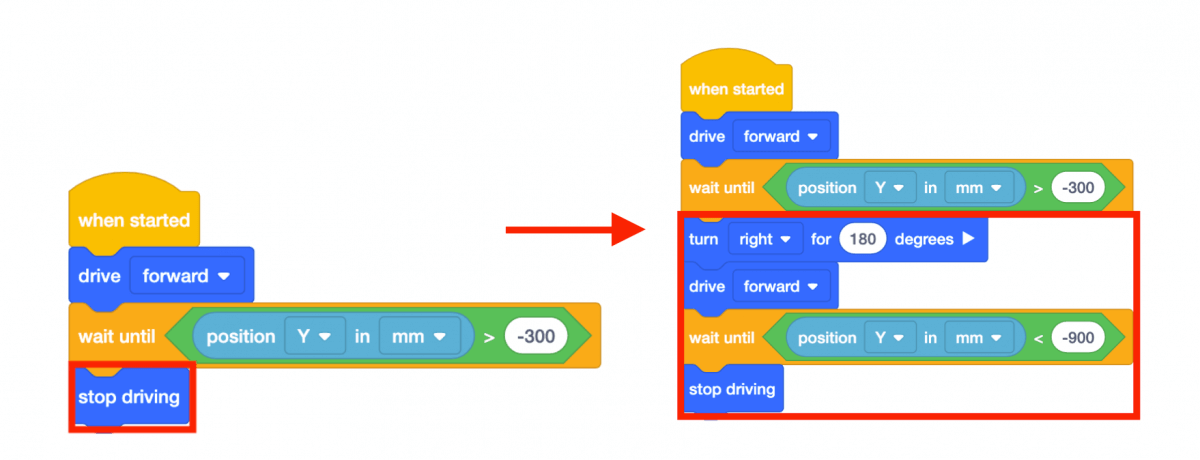
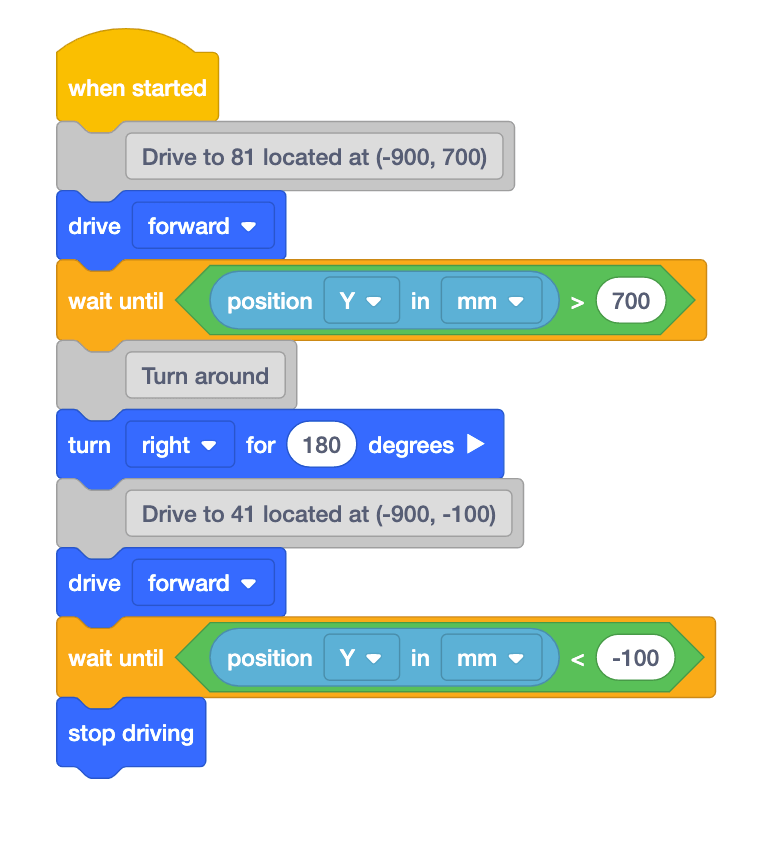
[ড্রাইভিং বন্ধ করুন] ব্লকটি সরান এবং নিম্নলিখিত ব্লকগুলির সাথে এটি প্রতিস্থাপন করুন।
-
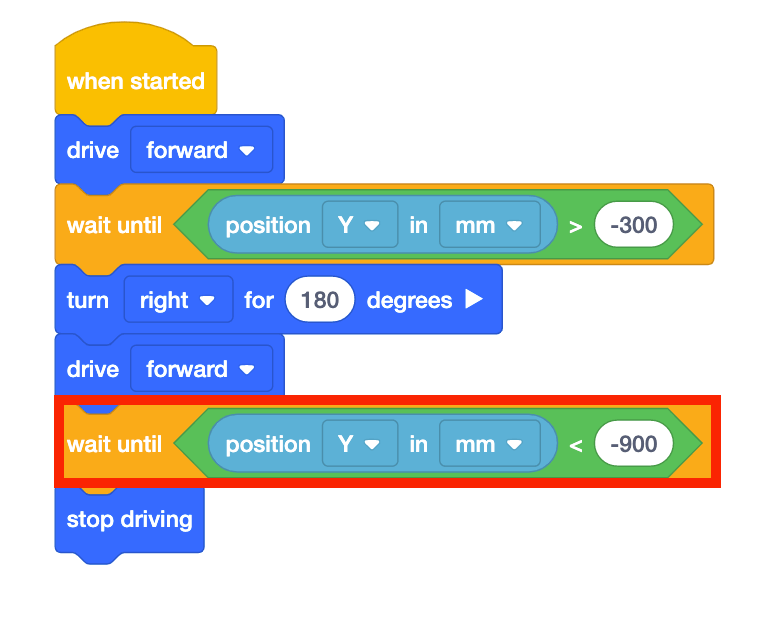
নোট করুন যে দ্বিতীয় [অপেক্ষা করুন] ব্লকে <Greater than> ব্লকের পরিবর্তে <Less than> ব্লক রয়েছে। এর কারণ হল VR রোবট এখন Y অক্ষের নিচে চলে যাচ্ছে এবং সংখ্যাগুলি আরও নেতিবাচক হয়ে উঠছে। Y-মানগুলি -900-এর থেকে কম হলে VR রোবট বন্ধ হয়ে যাবে৷
- নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড চালু করুন যদি এটি ইতিমধ্যে খোলা না থাকে এবং প্রকল্পটি চালান।
- নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড-এ '1' নম্বরে ভিআর রোবট ড্রাইভ দেখুন।
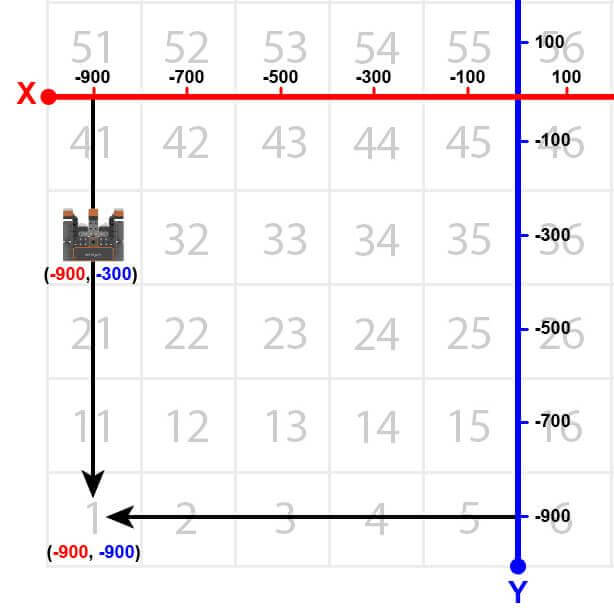
- এই প্রকল্পে, ভিআর রোবটটি নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড-এ '1' নম্বরে চলে যায়। যেহেতু VR রোবট '1' নম্বরে নিয়ে যাওয়ার ফলে Y-মান কমছে , প্রকল্পটি একটি <Less than> ব্লক ব্যবহার করে।
-
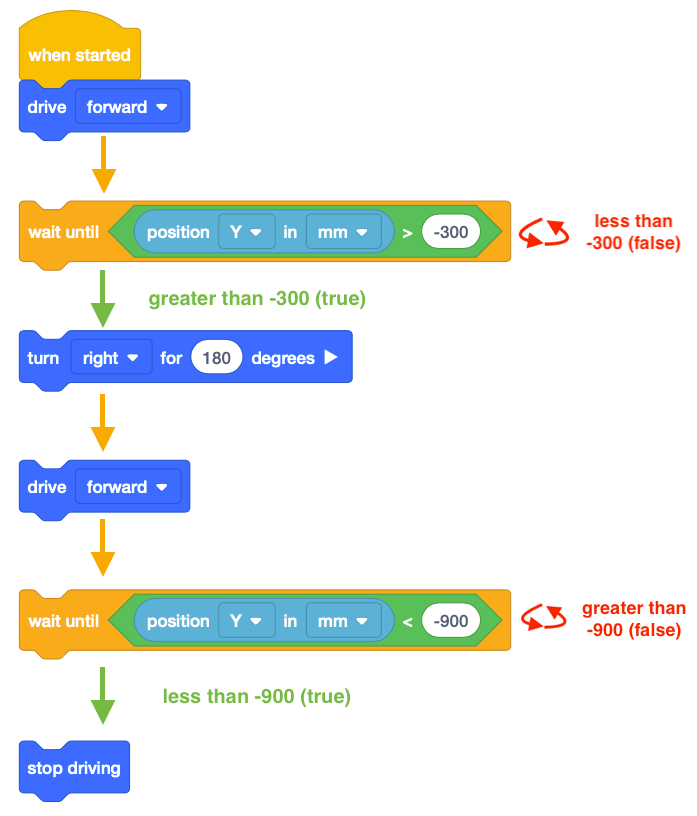
VR রোবটটি যখন নির্দেশিত নম্বরটি চালু আছে তার Y-মানের থেকে কম হলেই থামবে। যেহেতু '1' নম্বরের Y-মান -900, তাই Y-মান -900-এর কম হলে VR রোবট গাড়ি চালানো বন্ধ করে দেবে।
আপনার তথ্যের জন্য
একটি প্রোগ্রামার একটি প্রকল্পের অংশগুলি কী করতে চায় তা ব্যাখ্যা করার জন্য সাধারণত প্রকল্পগুলিতে মন্তব্যগুলি যোগ করা হয়। সহযোগিতা এবং সমস্যা সমাধানের সময় মন্তব্যগুলি সহায়ক, কারণ তারা কোডের প্রসঙ্গ এবং সামগ্রিক অর্থ প্রদান করে। মন্তব্যগুলি ব্যবহার করা প্রোগ্রামারকে "অনুমান এবং পরীক্ষা করার" চেষ্টা করার পরিবর্তে প্রকল্পের সামগ্রিক লক্ষ্য এবং উদ্দেশ্য সম্পর্কে ধারণাগতভাবে চিন্তা করতে দেয়। আপনি কি মনে রাখতে চান যে কোন স্থানাঙ্কগুলি একটি নির্দিষ্ট সংখ্যার সাথে যায়? "(-900, 700) এ অবস্থিত 81-এ ড্রাইভ করুন" বলে একটি মন্তব্য যোগ করুন। এটি প্রকল্পের বিভিন্ন বিভাগ এবং ব্লকের সাথে যোগাযোগ করতে সাহায্য করে।
মন্তব্য সম্পর্কে আরও তথ্যের জন্য, টি মন্তব্য - ভিআর ব্লক নিবন্ধটি দেখুন।
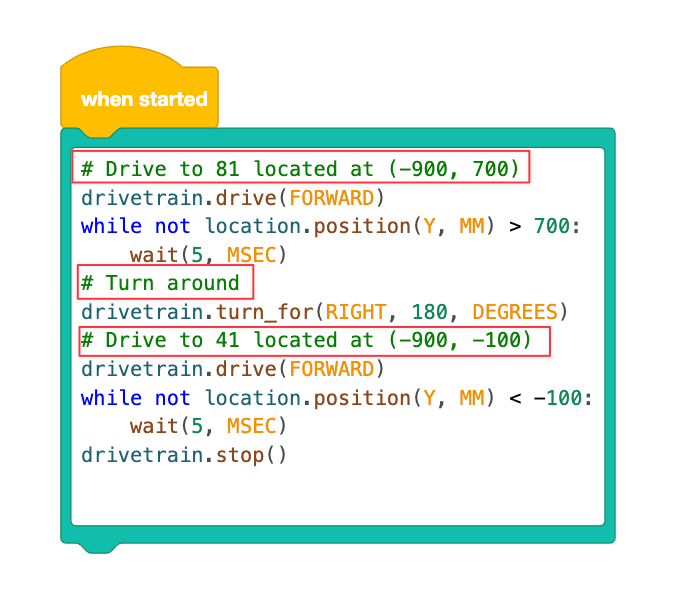
সুইচ ব্লক ব্যবহার করা
নিচের ছবিতে উপরের প্রকল্পটিকে একটি সুইচ ব্লকে রূপান্তরিত দেখানো হয়েছে। মনে রাখবেন যে পাইথনে মন্তব্যগুলি সবুজ রঙে লেখা হয়। পাইথনে আপনি পাউন্ড চিহ্ন (#) লিখে আপনার মন্তব্য লিখতে পারেন।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।