
Lección 3: Conducir al número ‘1’
- Reinicie el patio de recreo para mover el robot de realidad virtual de nuevo a la posición inicial.
-
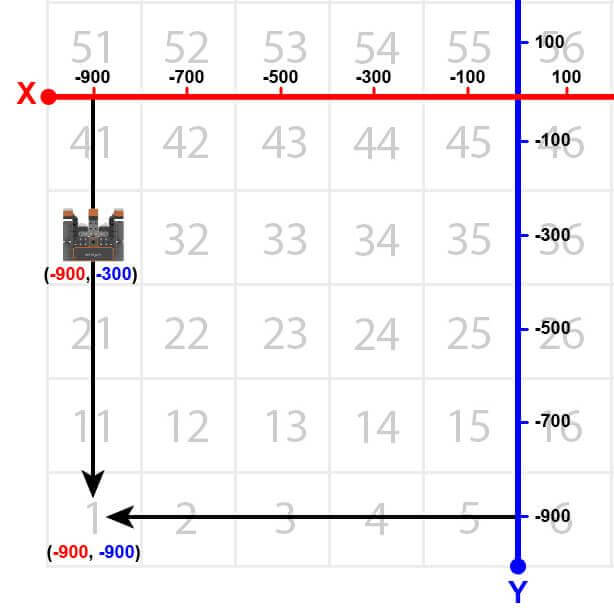
Ahora, el robot VR se dará la vuelta y volverá al número ‘1‘ una vez que llegue al número ‘31‘ en el patio de recreo del mapa de cuadrícula numérica.
-
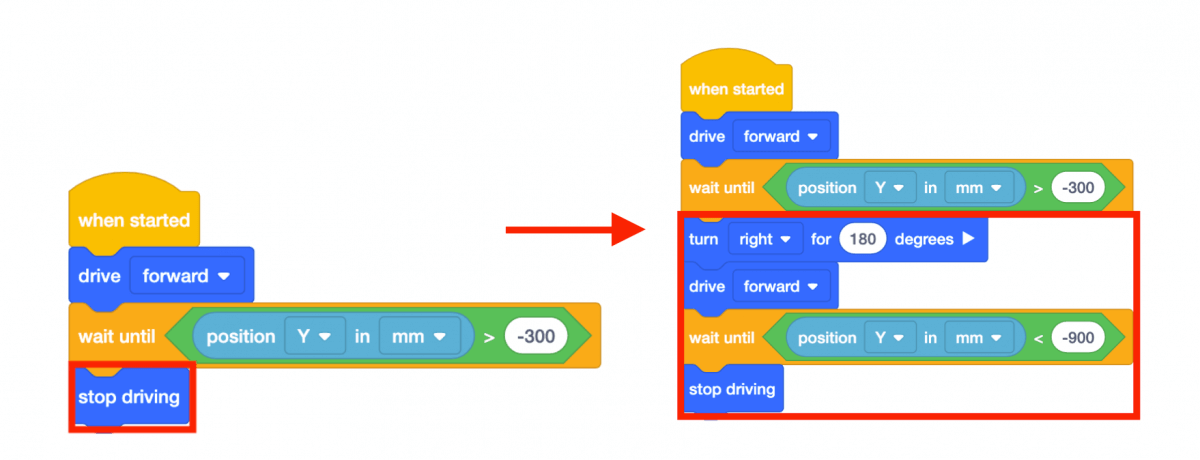
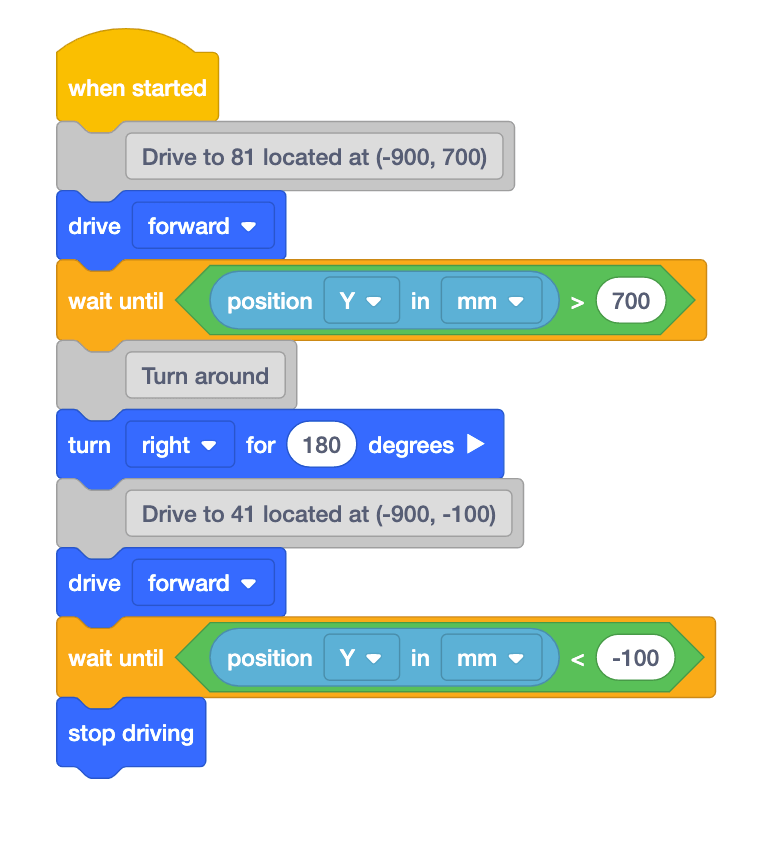
Retire el bloque [Stop driving] y reemplácelo por los siguientes bloques.
-
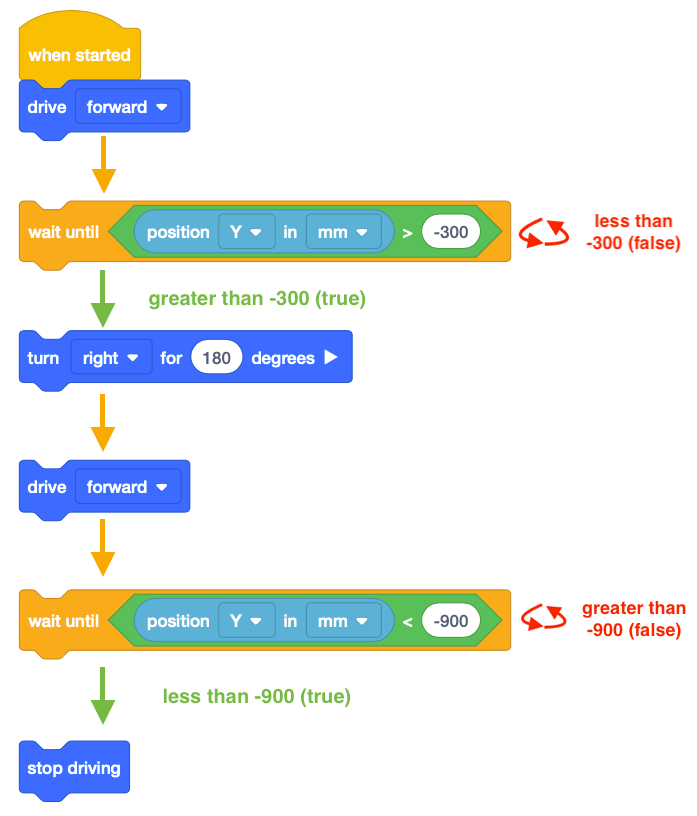
Tenga en cuenta que el segundo bloque [Esperar hasta] contiene un <Less than> bloque en lugar de un <Greater than> bloque. Esto se debe a que el robot VR ahora está conduciendo por el eje Y y los números se están volviendo más negativos. El robot VR se detendrá una vez que los valores Y sean INFERIORES a -900.
- Inicie Number Grid Map Playground si aún no está abierto y ejecute el proyecto.
- Observe cómo el robot VR conduce al número ‘1‘ en el patio de recreo del mapa de cuadrícula numérica.
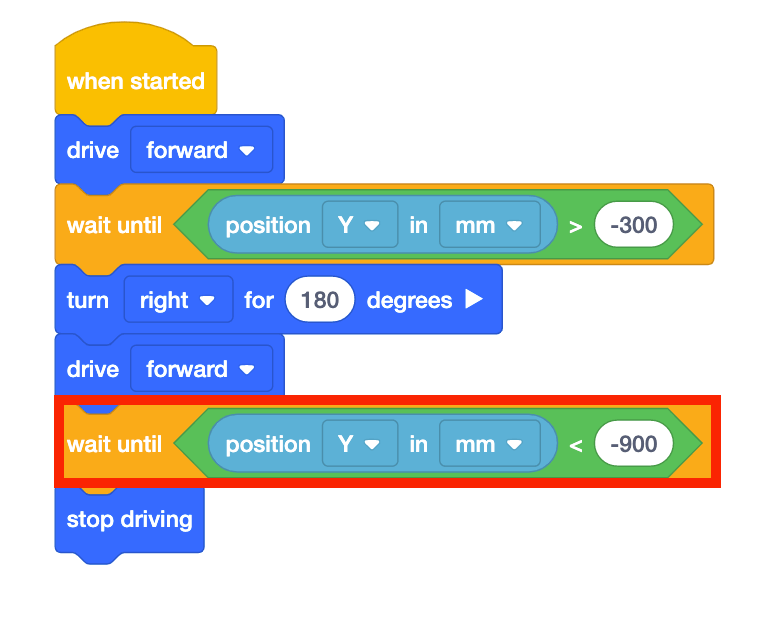
- En este proyecto, el robot VR conduce al número ‘1‘ en el patio de recreo del mapa de cuadrícula numérica. Dado que los valores Y están disminuyendo a medida que el robot VR llega al número ‘1’, el proyecto utiliza un <Less than> bloque.
-
El robot VR se detendrá una vez que su valor Y sea menor que el valor Y de la coordenada en la que está el número indicado. Dado que el valor Y del número ‘1’ es -900, el robot VR dejará de funcionar una vez que el valor Y sea inferior a -900.
Para su información
Los comentarios generalmente se añaden a los proyectos para explicar lo que un programador quiere que hagan las partes de un proyecto. Los comentarios son útiles a la hora de colaborar y solucionar problemas, ya que proporcionan contexto y significado general al código. El uso de comentarios permite al programador pensar conceptualmente sobre el objetivo general y la intención del proyecto, en lugar de tratar de "adivinar y verificar". ¿Quieres recordar qué coordenadas van con un número determinado? Añada un comentario que diga "Conduzca hasta 81 ubicado en (-900, 700)". Esto ayuda a comunicar diferentes secciones y bloques del proyecto.
Para obtener más información sobre los comentarios, consulte el artículo Comentarios - Bloques VR .
Uso de bloques de interruptores
La siguiente imagen muestra el proyecto de arriba convertido en un bloque Switch. Tenga en cuenta que los comentarios en Python están escritos en verde. Puedes escribir comentarios en Python introduciendo un signo de coma (#) seguido de tu comentario.

Seleccione el botón Siguiente para continuar con el resto de esta lección.