
Lezione 3: Guida verso il numero "1"
- Ripristinare il parco giochi per riportare il robot VR alla posizione di partenza.
-
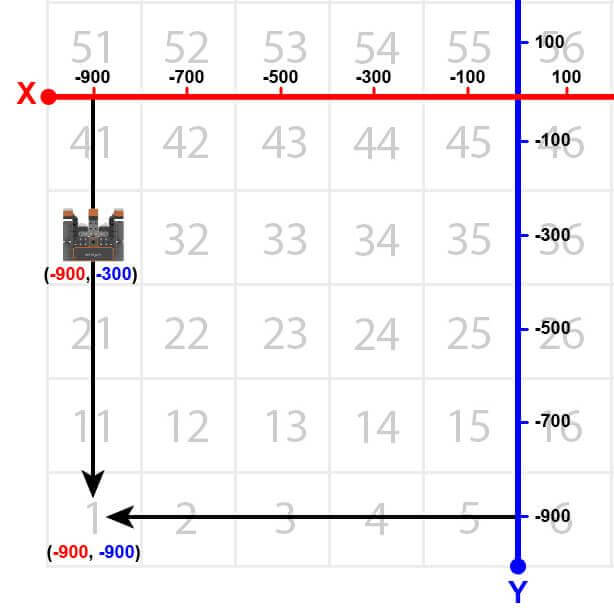
Ora, il robot VR si girerà e tornerà al numero "1" una volta raggiunto il numero "31" nel parco giochi della mappa della griglia dei numeri.
-
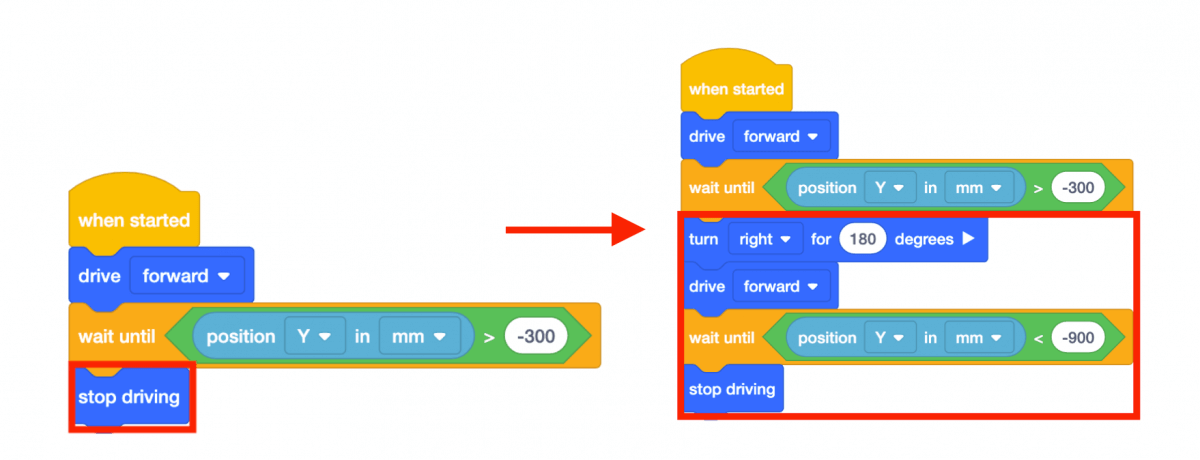
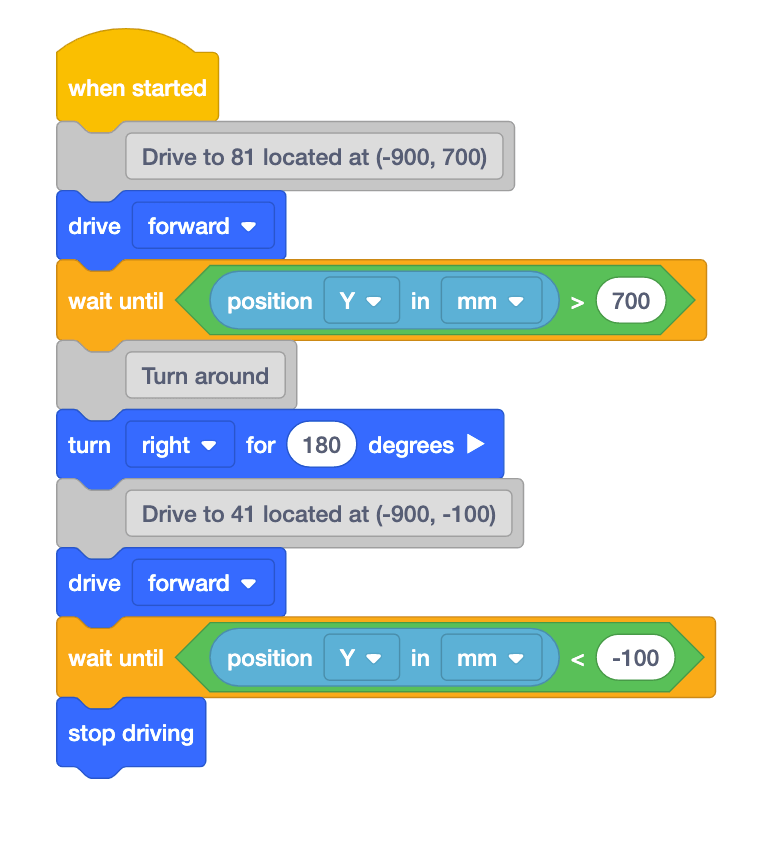
Rimuovere il blocco [Stop driving] e sostituirlo con i seguenti blocchi.
-
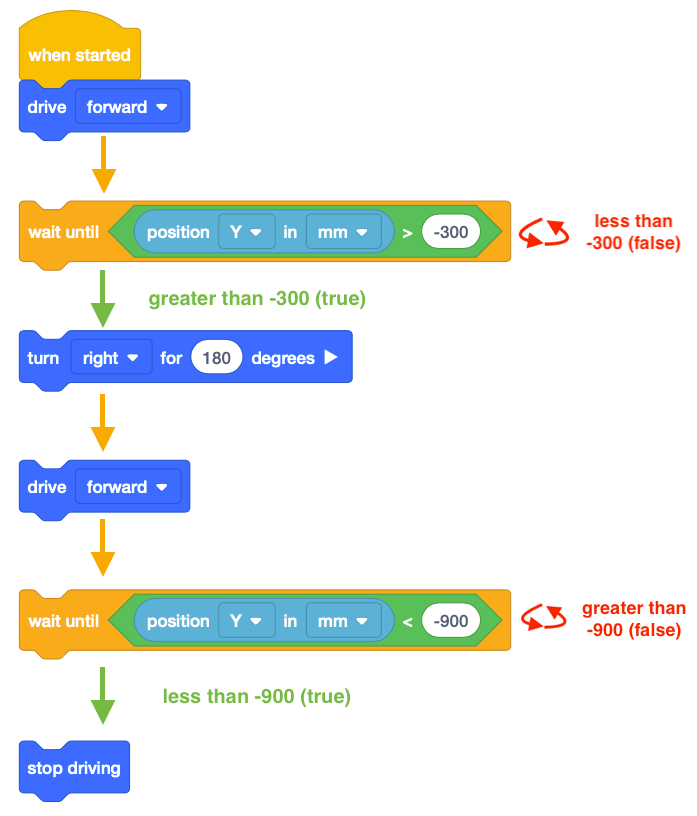
Si noti che il secondo blocco [Wait until] contiene un <Less than> blocco invece di un <Greater than> blocco. Questo perché il robot VR sta ora scendendo lungo l'asse Y e i numeri stanno diventando più negativi. Il robot VR si fermerà una volta che i valori Y sono INFERIORI a -900.
- Avviare il Number Grid Map Playground se non è già aperto ed eseguire il progetto.
- Guarda il robot VR guidare al numero "1" nel parco giochi della mappa della griglia dei numeri.
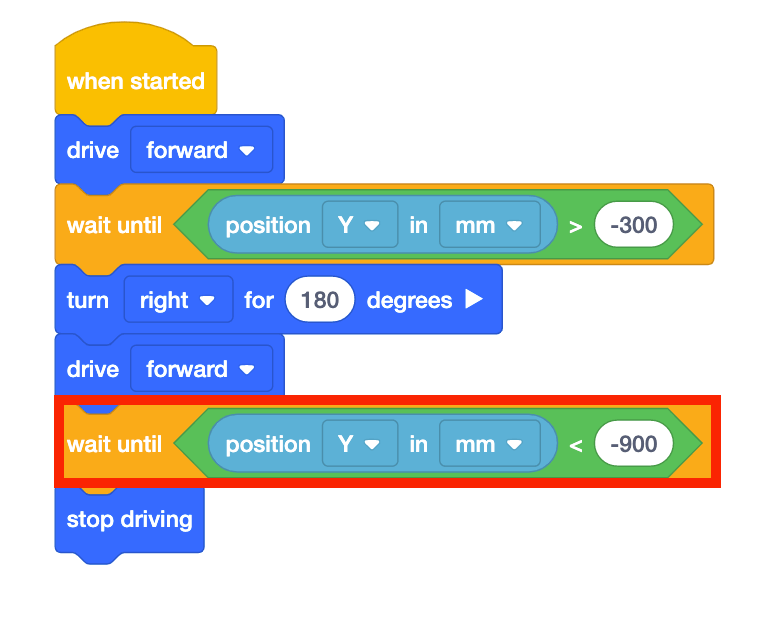
- In questo progetto, il robot VR si sposta sul numero "1" nel parco giochi della mappa della griglia dei numeri. Poiché i valori Y stanno diminuendo mentre il robot VR passa al numero "1", il progetto utilizza un <Less than> blocco.
-
Il Robot VR si fermerà una volta che il suo valore Y è inferiore al valore Y della coordinata su cui si trova il numero indicato. Poiché il valore Y del numero "1" è -900, il robot VR smetterà di guidare una volta che il valore Y è inferiore a -900.
Per tua informazione
I commenti vengono solitamente aggiunti ai progetti per spiegare ciò che un programmatore vuole che le parti di un progetto facciano. I commenti sono utili quando si collabora e si risolvono i problemi, in quanto forniscono contesto e significato generale al codice. L'utilizzo dei commenti consente al programmatore di pensare concettualmente all'obiettivo generale e all'intenzione del progetto, invece di cercare di "indovinare e verificare". Vuoi ricordare quali coordinate vanno con un certo numero? Aggiungi un commento che dice "Raggiungi l'81 situato a (-900, 700)." Questo aiuta a comunicare diverse sezioni e blocchi del progetto.
Per maggiori informazioni sui commenti, consulta l'articolo commenti - VR Blocks .
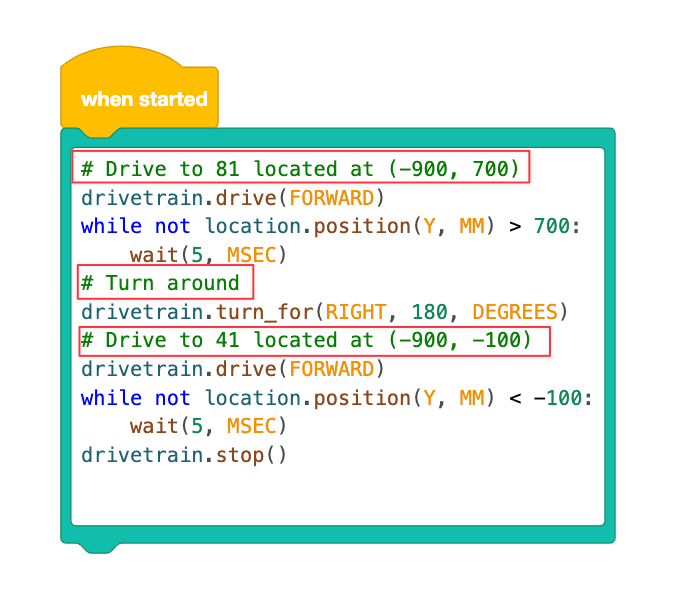
Utilizzo di blocchi di interruttori
L'immagine sottostante mostra il progetto sopra convertito in un blocco Switch. Si noti che i commenti in Python sono scritti in verde. Puoi scrivere commenti in Python inserendo un segno di cancelletto (#) seguito dal tuo commento.
Selezionare il pulsante Avanti per continuare con il resto della lezione.