
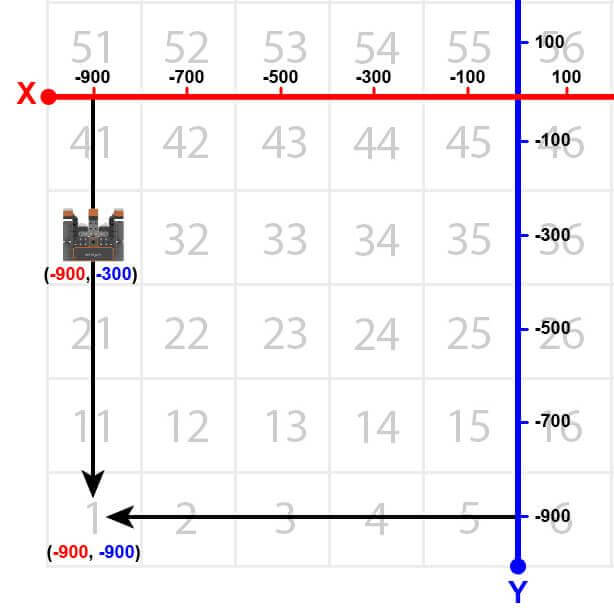
Lektion 3: Fahren Sie zur Nummer ‘1’
- Setzen Sie den Spielplatz zurück, um den VR-Roboter zurück in die Ausgangsposition zu bewegen.
-
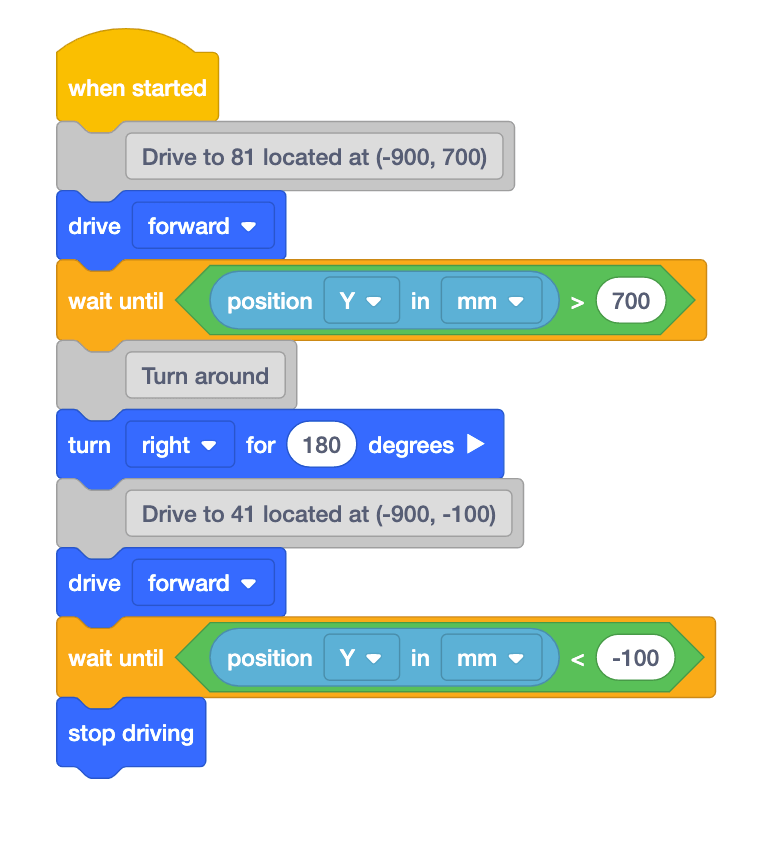
Jetzt dreht sich der VR-Roboter um und kehrt zur Nummer ‘1‘ zurück, sobald er die Nummer ‘31‘ auf dem Number Grid Map Playground erreicht hat.
-
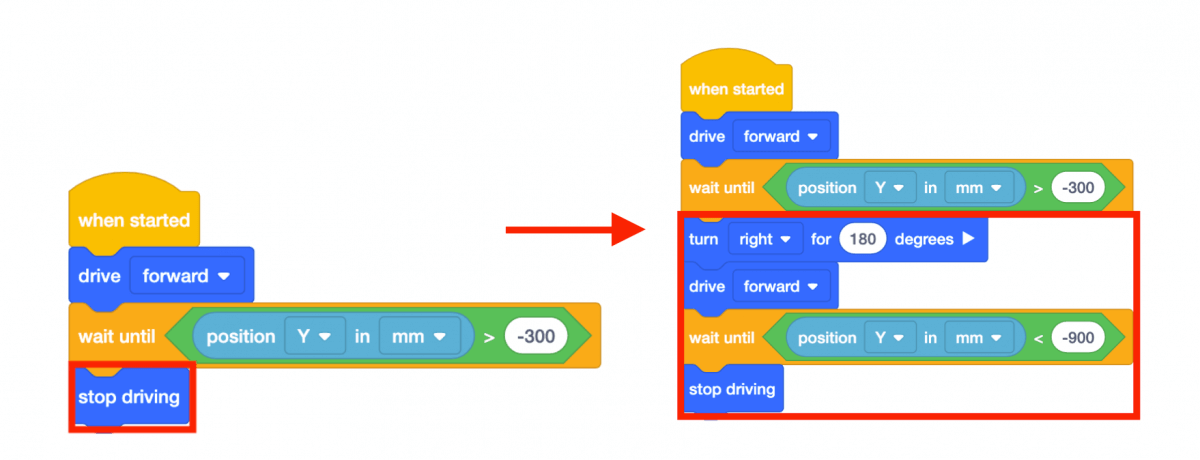
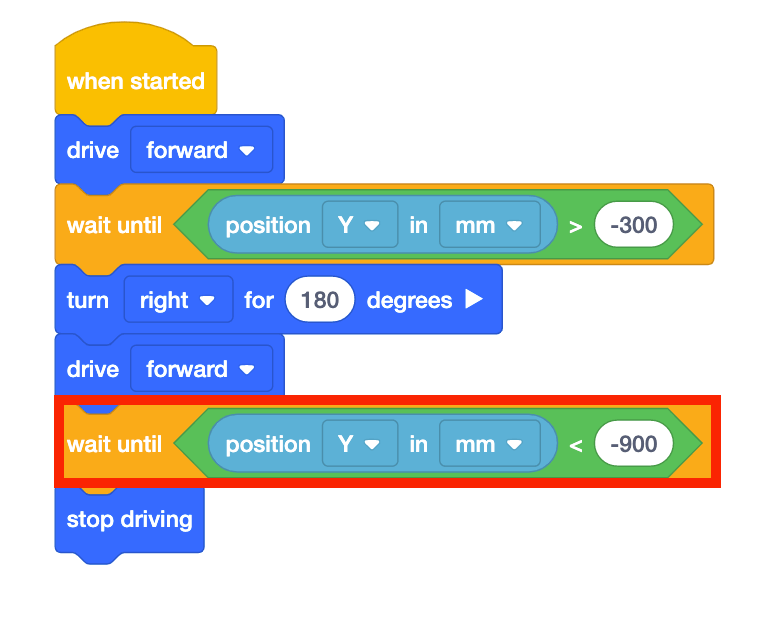
Entfernen Sie den Block [Stop driving] und ersetzen Sie ihn durch die folgenden Blöcke.
-
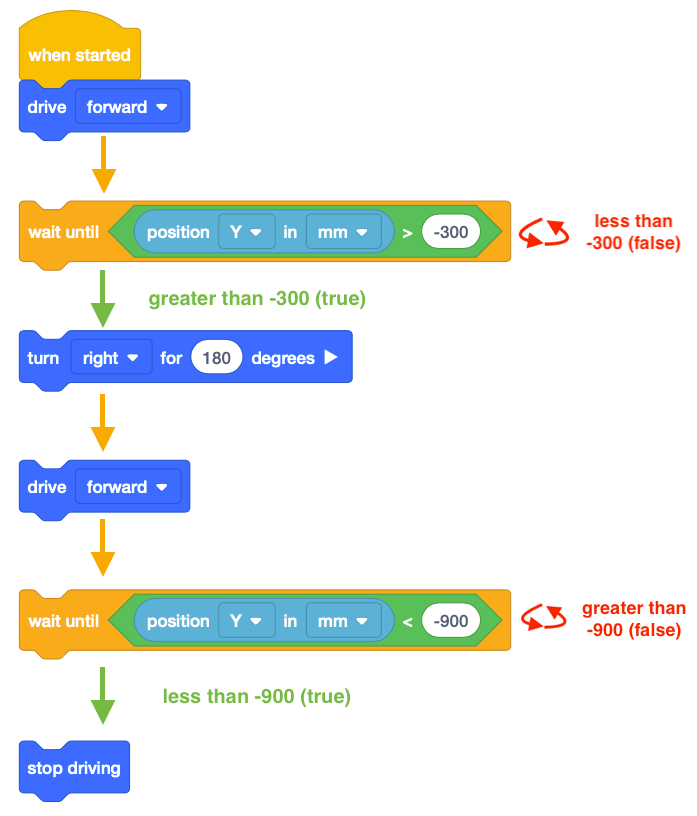
Beachten Sie, dass der zweite Block [Warten bis] einen <Less than> Block anstelle eines <Greater than> Blocks enthält. Dies liegt daran, dass der VR-Roboter jetzt die Y-Achse herunterfährt und die Zahlen negativer werden. Der VR-Roboter stoppt, sobald die Y-Werte UNTER -900 liegen.
- Starten Sie den Number Grid Map Playground , wenn er noch nicht geöffnet ist, und führen Sie das Projekt aus.
- Beobachten Sie, wie der VR-Roboter auf dem Number Grid Map Playground zur Nummer „1“ fährt.
- In diesem Projekt fährt der VR-Roboter zur Nummer ‘1‘ auf dem Number Grid Map Playground. Da die Y-Werte abnehmen , wenn der VR-Roboter auf die Zahl ‘1‘ fährt, verwendet das Projekt einen <Less than> Block.
-
Der VR-Roboter stoppt, sobald sein Y-Wert kleiner als der Y-Wert der Koordinate ist, auf der die angegebene Zahl steht. Da der Y-Wert der Zahl ‘1‘ -900 ist, hört der VR-Roboter auf zu fahren, sobald der Y-Wert kleiner als -900 ist.
Zur Kenntnisnahme
Kommentare werden normalerweise zu Projekten hinzugefügt, um zu erklären, was ein Programmierer mit Teilen eines Projekts machen möchte. Kommentare sind hilfreich bei der Zusammenarbeit und Fehlerbehebung, da sie dem Code Kontext und allgemeine Bedeutung verleihen. Die Verwendung von Kommentaren ermöglicht es dem Programmierer, konzeptionell über das Gesamtziel und die Absicht des Projekts nachzudenken, anstatt zu versuchen, "zu erraten und zu überprüfen". Möchten Sie sich merken, welche Koordinaten zu einer bestimmten Zahl gehören? Fügen Sie einen Kommentar mit der Aufschrift „Fahren Sie zu 81 unter (-900, 700)“ hinzu. Dies hilft, verschiedene Abschnitte und Blöcke des Projekts zu kommunizieren.
Weitere Informationen zu Kommentaren finden Sie im Artikel „ Kommentare – VR-Blöcke .
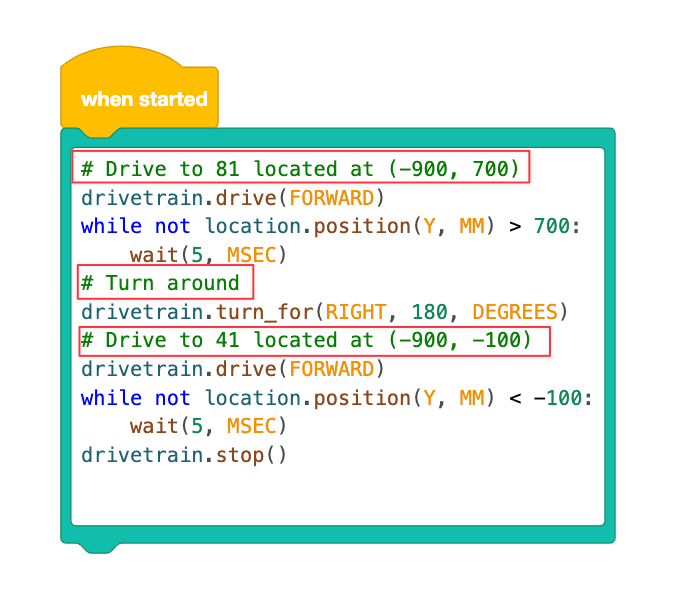
Verwenden von Schalterblöcken
Die folgende Abbildung zeigt das obige Projekt, das in einen Switch-Block umgewandelt wurde. Beachten Sie, dass Kommentare in Python grün geschrieben sind. Sie können Kommentare in Python schreiben, indem Sie ein Pfundzeichen (#) gefolgt von Ihrem Kommentar eingeben.
Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.