
പാഠം 3: '1' എന്ന നമ്പറിലേക്ക് ഡ്രൈവ് ചെയ്യുക
- VR റോബോട്ടിനെ ആരംഭ സ്ഥാനത്തേക്ക് തിരികെ നീക്കാൻ പ്ലേഗ്രൗണ്ട് റീസെറ്റ് ചെയ്യുക.
-
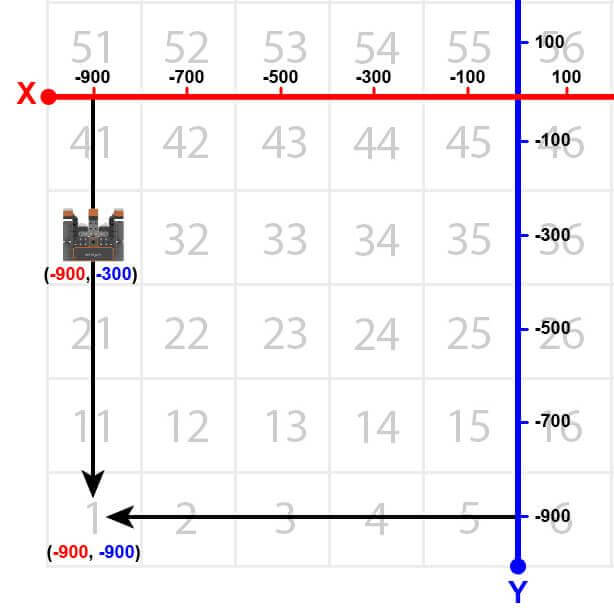
ഇപ്പോൾ, നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ട്ൽ '31' എന്ന നമ്പറിൽ എത്തുമ്പോൾ, VR റോബോട്ട് തിരിഞ്ഞ് '1' എന്ന നമ്പറിലേക്ക് മടങ്ങും.
-
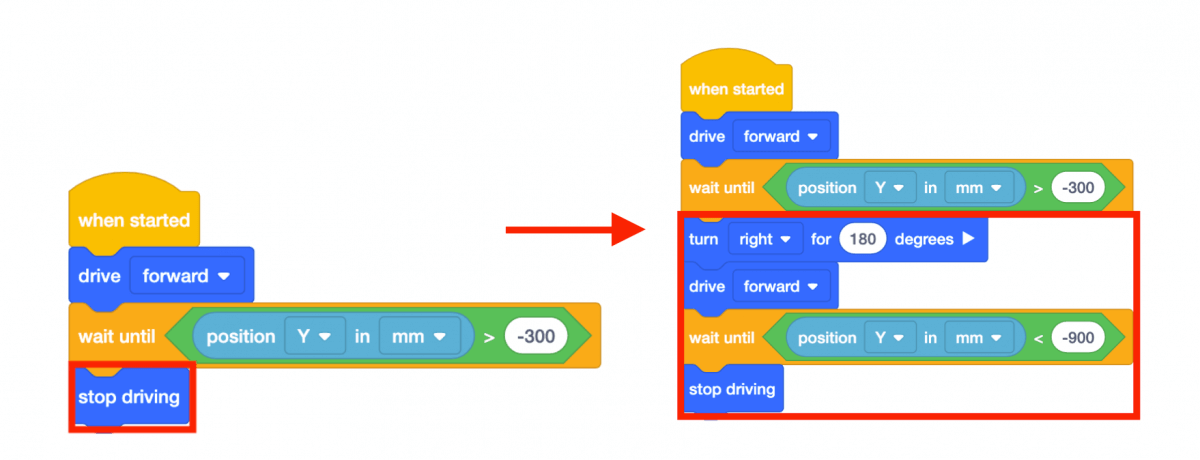
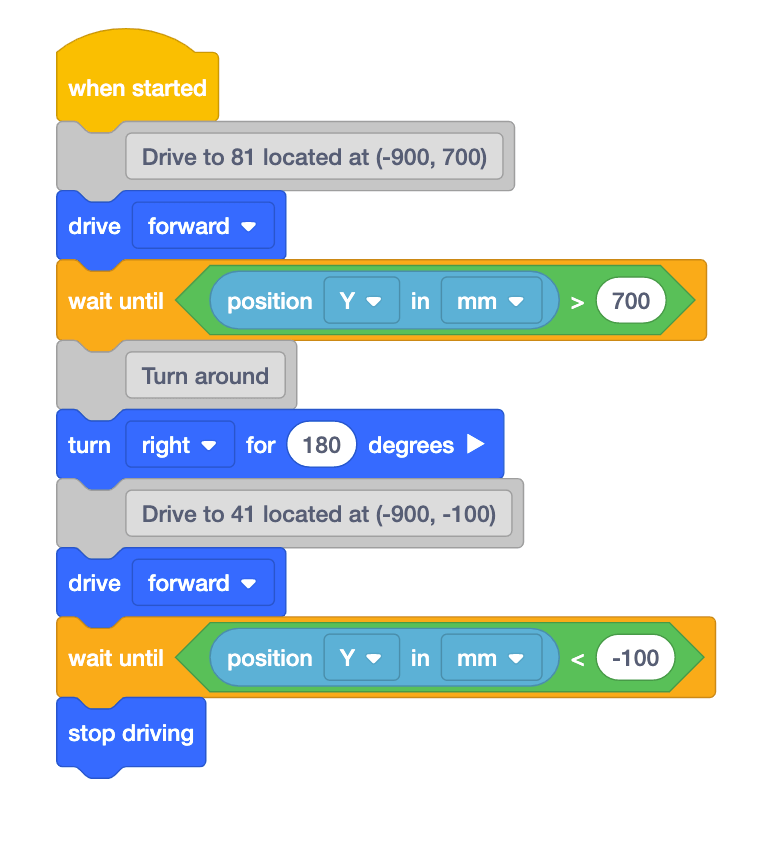
[സ്റ്റോപ്പ് ഡ്രൈവിംഗ്] ബ്ലോക്ക് നീക്കം ചെയ്ത് താഴെ പറയുന്ന ബ്ലോക്കുകൾ പകരം വയ്ക്കുക.
-
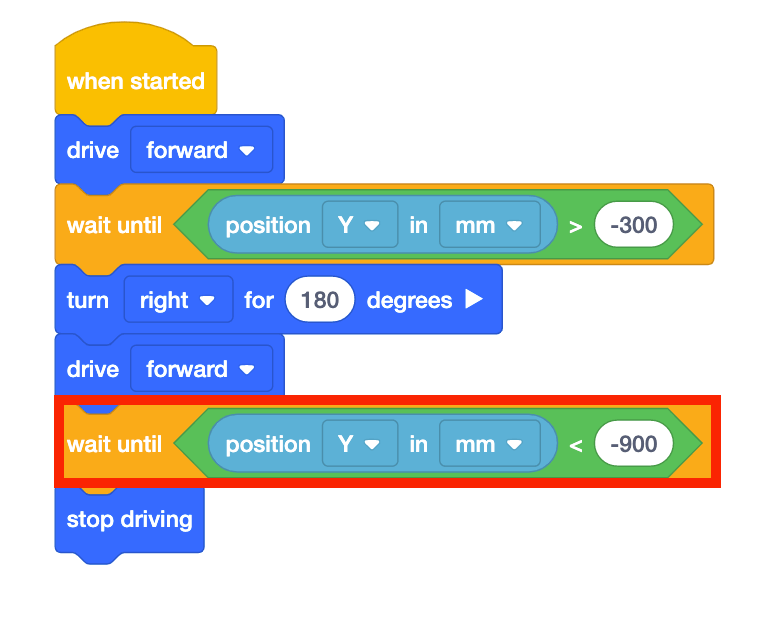
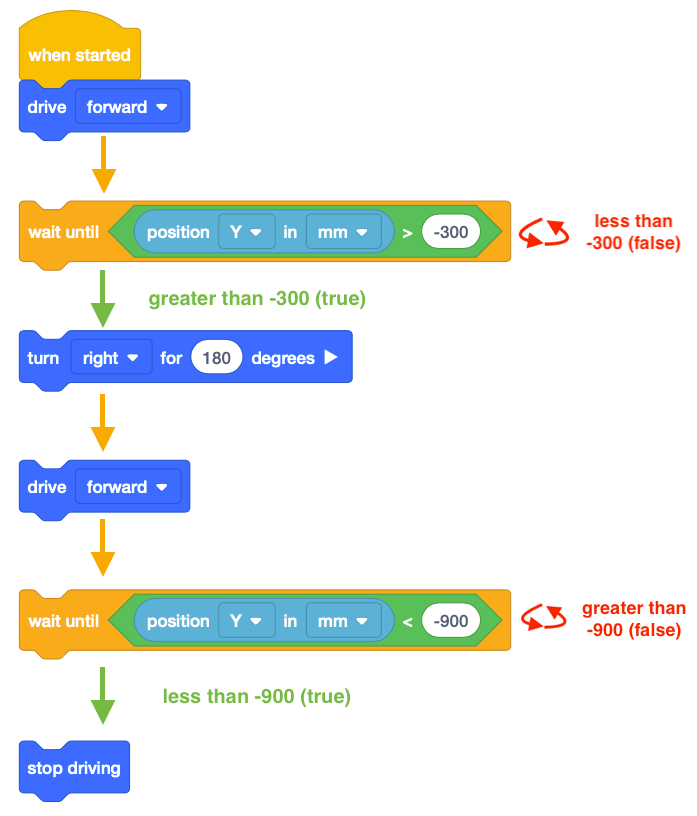
രണ്ടാമത്തെ [Wait until] ബ്ലോക്കിൽ <Greater than> ബ്ലോക്കിന് പകരം <Less than> ബ്ലോക്ക് ഉണ്ടെന്ന് ശ്രദ്ധിക്കുക. കാരണം, VR റോബോട്ട് ഇപ്പോൾ Y അക്ഷത്തിലൂടെ താഴേക്ക് നീങ്ങുകയും സംഖ്യകൾ കൂടുതൽ നെഗറ്റീവ് ആയി മാറുകയും ചെയ്യുന്നു. Y-മൂല്യങ്ങൾ -900-ൽ താഴെയാകുമ്പോൾ VR റോബോട്ട് നിർത്തും.
- നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ട് തുറന്നിട്ടില്ലെങ്കിൽ അത് സമാരംഭിച്ച് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
- നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ട്ൽ '1' എന്ന നമ്പറിലേക്ക് VR റോബോട്ട് ഡ്രൈവ് ചെയ്യുന്നത് കാണുക.
- ഈ പ്രോജക്റ്റിൽ, VR റോബോട്ട് നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ട്ലെ '1' എന്ന നമ്പറിലേക്ക് ഡ്രൈവ് ചെയ്യുന്നു. VR റോബോട്ട് '1' എന്ന സംഖ്യയിലേക്ക് ഡ്രൈവ് Y-മൂല്യങ്ങൾ കുറയുന്നതിനാൽ, പ്രോജക്റ്റ് ഒരു <Less than> ബ്ലോക്ക് ഉപയോഗിക്കുന്നു.
-
സൂചിപ്പിച്ചിരിക്കുന്ന സംഖ്യ ഓണായിരിക്കുന്ന കോർഡിനേറ്റിന്റെ Y-മൂല്യത്തേക്കാൾ കുറഞ്ഞ് ആകുമ്പോൾ VR റോബോട്ട് നിർത്തും. '1' എന്ന സംഖ്യയുടെ Y- മൂല്യം -900 ആയതിനാൽ, Y- മൂല്യം -900 ൽ താഴെയാകുമ്പോൾ VR റോബോട്ട് ഡ്രൈവിംഗ് നിർത്തും.
നിങ്ങളുടെ അറിവിലേക്കായി
ഒരു പ്രോഗ്രാമർ ഒരു പ്രോജക്റ്റിന്റെ ഭാഗങ്ങൾ എന്തുചെയ്യണമെന്ന് ആഗ്രഹിക്കുന്നുവെന്ന് വിശദീകരിക്കുന്നതിനാണ് സാധാരണയായി അഭിപ്രായങ്ങൾ പ്രോജക്റ്റുകളിൽ ചേർക്കുന്നത്. സഹകരിക്കുമ്പോഴും പ്രശ്നപരിഹാരം കണ്ടെത്തുമ്പോഴും അഭിപ്രായങ്ങൾ സഹായകരമാണ്, കാരണം അവ കോഡിന് സന്ദർഭവും മൊത്തത്തിലുള്ള അർത്ഥവും നൽകുന്നു. അഭിപ്രായങ്ങൾ ഉപയോഗിക്കുന്നത് പ്രോഗ്രാമർക്ക് "ഊഹിച്ച് പരിശോധിക്കാൻ" ശ്രമിക്കുന്നതിനുപകരം, പ്രോജക്റ്റിന്റെ മൊത്തത്തിലുള്ള ലക്ഷ്യത്തെയും ഉദ്ദേശ്യത്തെയും കുറിച്ച് ആശയപരമായി ചിന്തിക്കാൻ അനുവദിക്കുന്നു. ഒരു നിശ്ചിത സംഖ്യയ്ക്കൊപ്പം ഏതൊക്കെ കോർഡിനേറ്റുകൾ പോകുന്നുവെന്ന് ഓർമ്മിക്കാൻ നിങ്ങൾ ആഗ്രഹിക്കുന്നുണ്ടോ? "(-900, 700) എന്ന വിലാസത്തിൽ സ്ഥിതി ചെയ്യുന്ന 81 ലേക്ക് ഡ്രൈവ് ചെയ്യുക" എന്ന് പറയുന്ന ഒരു കമന്റ് ചേർക്കുക. ഇത് പ്രോജക്റ്റിന്റെ വിവിധ വിഭാഗങ്ങളെയും ബ്ലോക്കുകളെയും ആശയവിനിമയം ചെയ്യാൻ സഹായിക്കുന്നു.
അഭിപ്രായങ്ങളെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, അഭിപ്രായങ്ങൾ - VR ബ്ലോക്ക്സ് എന്ന ലേഖനം കാണുക.
സ്വിച്ച് ബ്ലോക്കുകൾ ഉപയോഗിക്കുന്നു
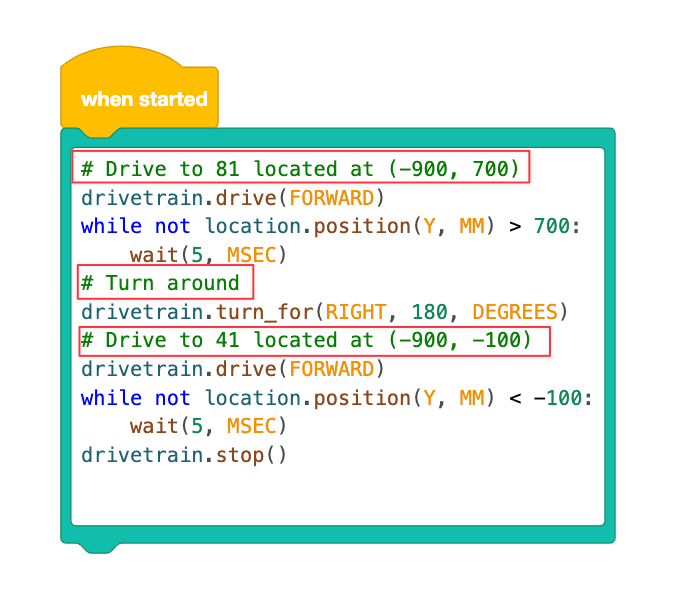
മുകളിലുള്ള പ്രോജക്റ്റ് ഒരു സ്വിച്ച് ബ്ലോക്കിലേക്ക് പരിവർത്തനം ചെയ്തതായി താഴെയുള്ള ചിത്രം കാണിക്കുന്നു. പൈത്തണിലെ അഭിപ്രായങ്ങൾ പച്ച നിറത്തിലാണ് എഴുതിയിരിക്കുന്നതെന്ന് ശ്രദ്ധിക്കുക. ഒരു പൗണ്ട് ചിഹ്നം (#) നൽകി നിങ്ങളുടെ അഭിപ്രായം നൽകി പൈത്തണിൽ അഭിപ്രായങ്ങൾ എഴുതാം.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.