
Lição 3: Dirija para o número ‘1’
- Redefina o Playground para mover o Robô VR de volta à posição inicial.
-
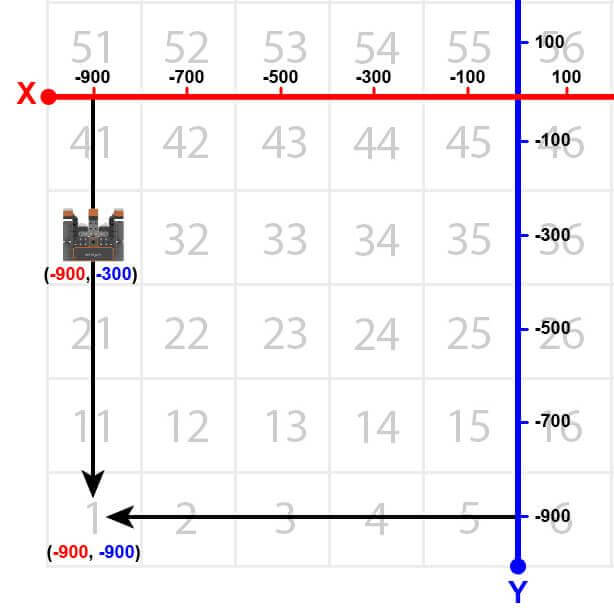
Agora, o Robô de RV se vira e retorna ao número ‘1‘ assim que atinge o número ‘31‘ no Playground do Mapa de Grade de Números.
-
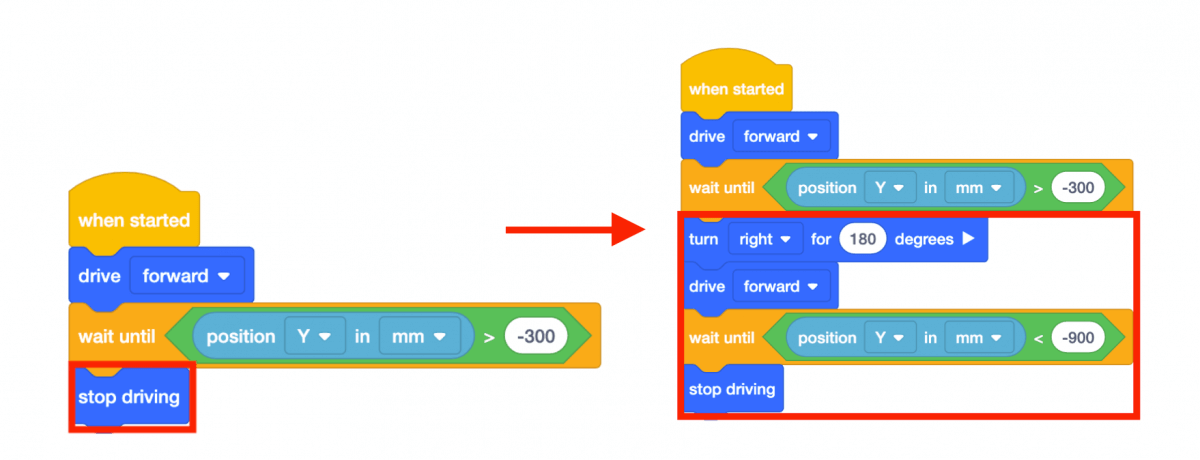
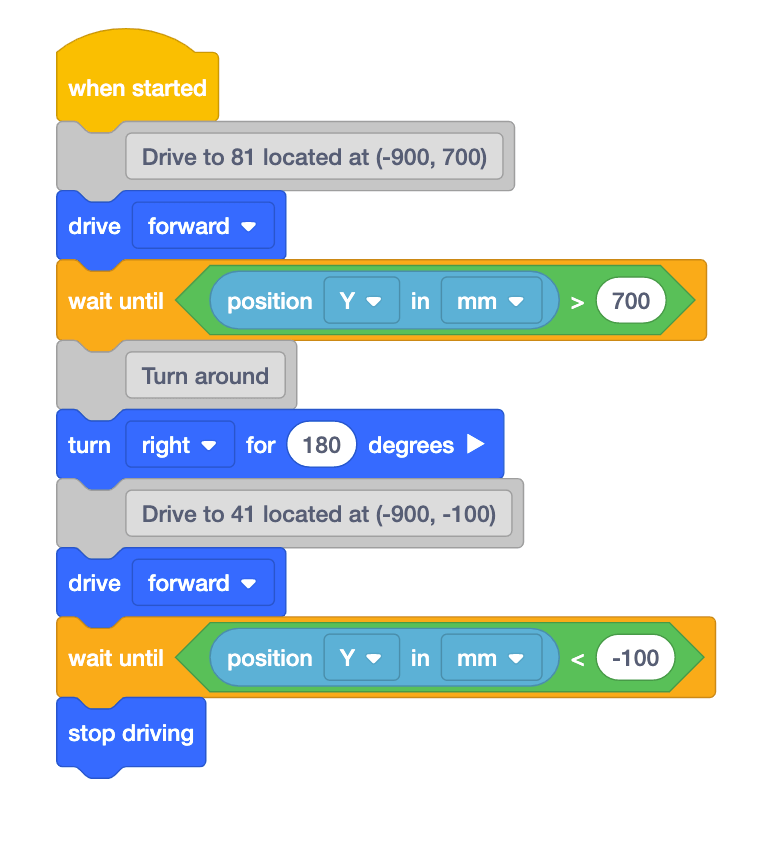
Remova o bloco [Stop driving] e substitua-o pelos seguintes blocos.
-
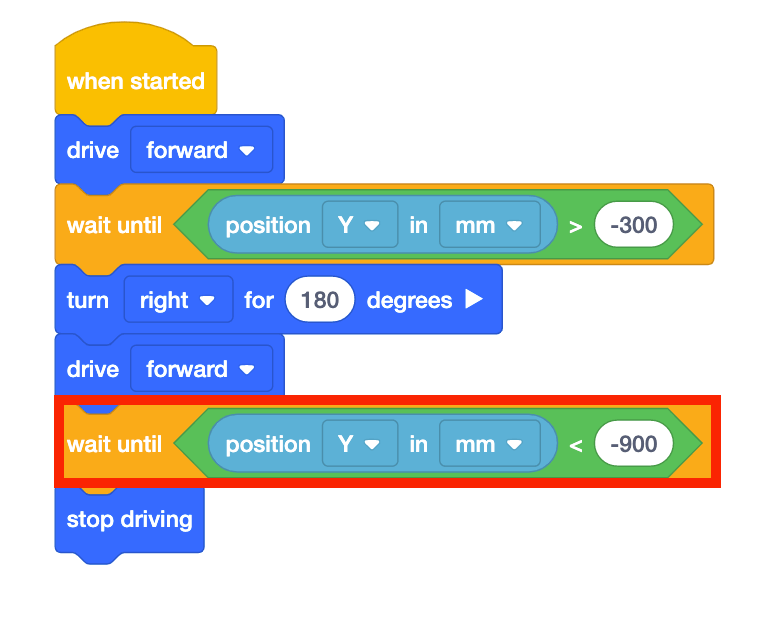
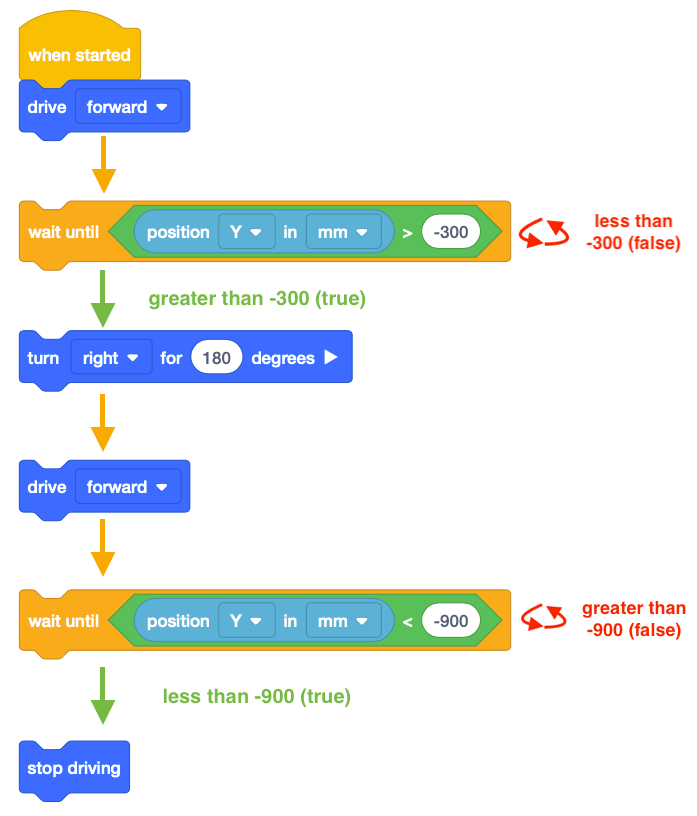
Observe que o segundo bloco [Aguarde até] contém um <Less than> bloco em vez de um <Greater than> bloco. Isso ocorre porque o Robô VR está agora dirigindo pelo eixo Y e os números estão se tornando mais negativos. O Robô VR irá parar quando os valores Y forem INFERIORES a -900.
- Inicie o Number Grid Map Playground, se ainda não estiver aberto, e execute o projeto.
- Assista ao Robô VR dirigir para o número ‘1’ no Playground Number Grid Map.
- Neste projeto, o Robô de RV dirige para o número ‘1’ no Playground do Mapa de Grade Numérica. Uma vez que os valores Y estão diminuindo à medida que o Robô VR dirige para o número ‘1’, o projeto usa um <Less than> bloco.
-
O Robô VR irá parar quando o seu valor Y for menor que o valor Y da coordenada em que o número indicado está ligado. Uma vez que o valor Y do número ‘1’ é -900, o Robô VR irá parar de conduzir assim que o valor Y for inferior a -900.
Para sua informação
Geralmente, os comentários são adicionados aos projetos para explicar o que um programador quer que partes de um projeto façam. Os comentários são úteis ao colaborar e solucionar problemas, pois fornecem contexto e significado geral ao código. O uso de comentários permite que o programador pense conceitualmente sobre o objetivo geral e a intenção do projeto, em vez de tentar "adivinhar e verificar". Deseja lembrar quais coordenadas acompanham um determinado número? Adicione um comentário dizendo "Dirija para 81 localizado em (-900, 700)." Isso ajuda a comunicar diferentes seções e blocos do projeto.
Para mais informações sobre comentários, consulte o artigo Comentários - Blocos VR .
Usando Blocos de Interruptor
A imagem abaixo mostra o projeto acima convertido num bloco Switch. Observe que os comentários em Python são escritos em verde. Você pode escrever comentários em Python inserindo um sinal de libra (#) seguido do seu comentário.

Selecione o botão Seguinte para continuar com o resto desta lição.