
บทเรียนที่ 3: ขับรถไปยังหมายเลข ‘1’
- รีเซ็ตสนามเด็กเล่นเพื่อย้ายหุ่นยนต์ VR กลับไปที่ตำแหน่งเริ่มต้น
-
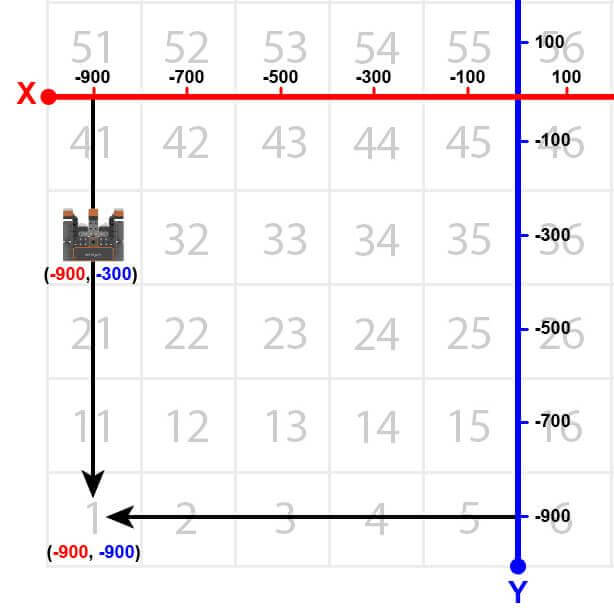
ตอนนี้หุ่นยนต์ VR จะหมุนกลับและกลับไปที่หมายเลข ‘1’ เมื่อถึงหมายเลข ‘31’ บน Number Grid MapPlayground
-
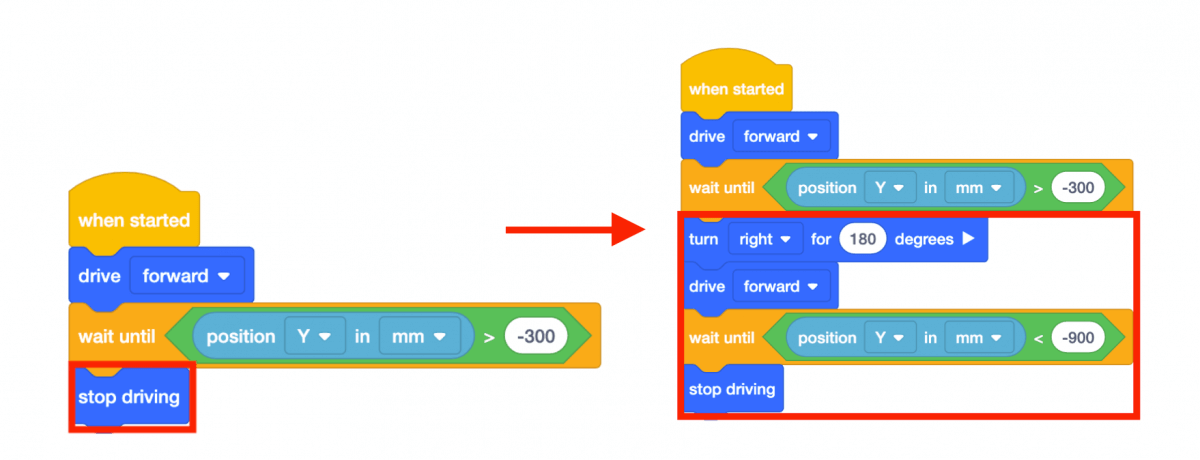
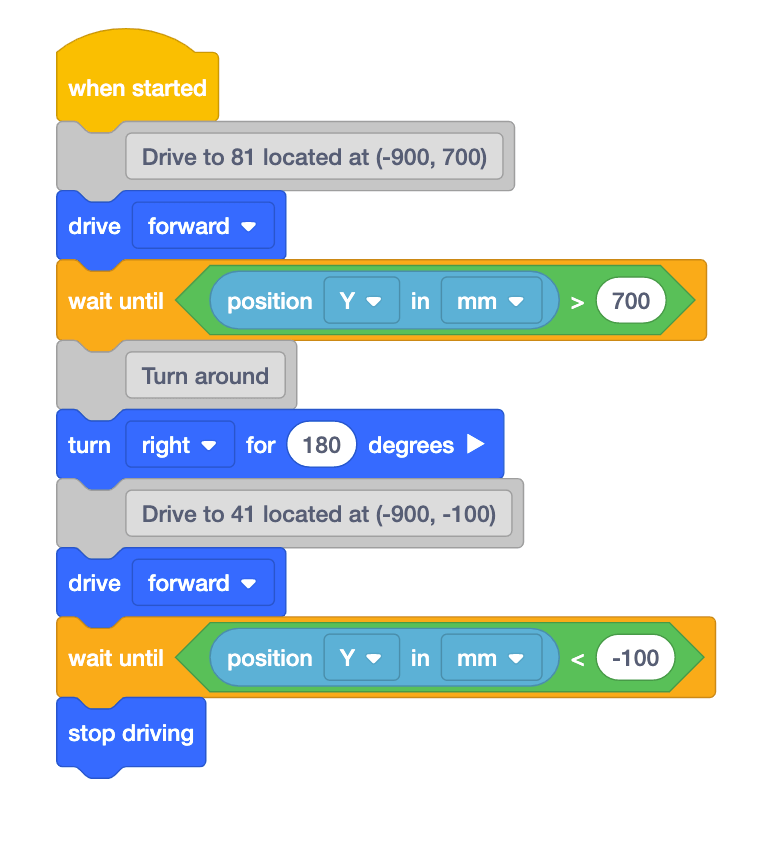
ถอดบล็อก [หยุดขับ] และแทนที่ด้วยบล็อกต่อไปนี้
-
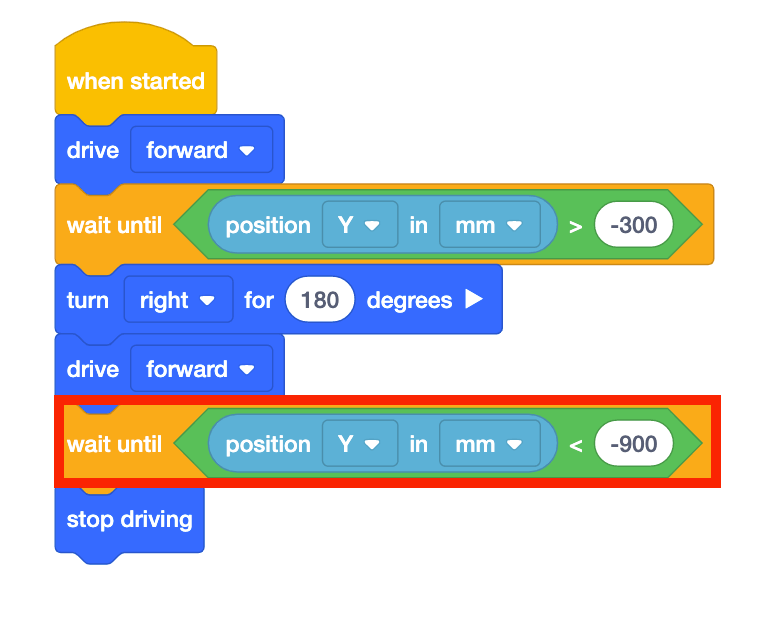
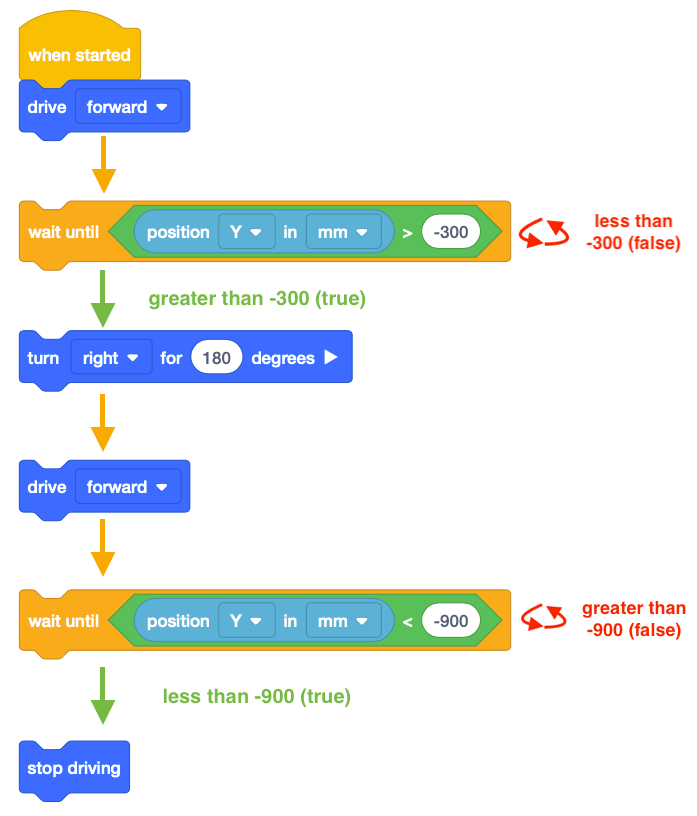
โปรดทราบว่าบล็อก [รอจนกว่า] ที่สองมี <Less than> บล็อกแทน <Greater than> บล็อก นี่เป็นเพราะตอนนี้หุ่นยนต์ VR กำลังขับเคลื่อนแกน Y ลงมาและตัวเลขก็กลายเป็นลบมากขึ้น หุ่นยนต์ VR จะหยุดทำงานเมื่อค่า Y น้อยกว่า -900
- เปิด Number Grid Map Playground หากยังไม่เปิดและดำเนินโครงการ
- ดู VR Robot ขับไปที่หมายเลข ‘1’ บน Number Grid MapPlayground
- ในโครงการนี้หุ่นยนต์ VR จะขับไปที่หมายเลข ‘1’ บน Number Grid MapPlayground เนื่องจากค่า Y ลด ลงเมื่อ VR Robot ขับเคลื่อนไปที่หมายเลข ‘1’ โครงการจึงใช้ <Less than> บล็อก
-
หุ่นยนต์ VR จะหยุดทำงานเมื่อค่า Y ของมัน น้อย กว่าค่า Y ของพิกัดที่หมายเลขที่ระบุเปิดอยู่ เนื่องจากค่า Y ของตัวเลข ‘1’ คือ -900 หุ่นยนต์ VR จะหยุดขับเมื่อค่า Y น้อยกว่า -900
สำหรับข้อมูลของคุณ
ความคิดเห็นมักจะถูกเพิ่มลงในโครงการเพื่ออธิบายสิ่งที่โปรแกรมเมอร์ต้องการให้บางส่วนของโครงการทำ ความคิดเห็นมีประโยชน์เมื่อทำงานร่วมกันและแก้ไขปัญหาเนื่องจากให้บริบทและความหมายโดยรวมของโค้ด การใช้ความคิดเห็นช่วยให้โปรแกรมเมอร์คิดตามแนวคิดเกี่ยวกับเป้าหมายและความตั้งใจโดยรวมของโครงการแทนที่จะพยายาม "คาดเดาและตรวจสอบ" คุณต้องการที่จะจำพิกัดที่ไปกับตัวเลขที่แน่นอนหรือไม่? เพิ่มความคิดเห็นว่า “ขับไปที่ 81 ที่อยู่ (-900, 700 )” ซึ่งจะช่วยในการสื่อสารส่วนต่างๆและช่วงตึกของโครงการ
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับความคิดเห็นโปรดดูที่ ความคิดเห็น - บทความ VR Blocks
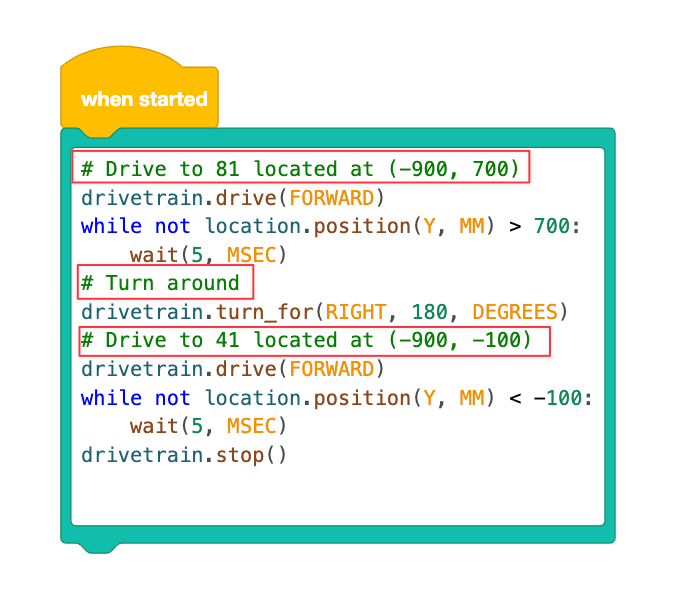
การใช้สวิทช์บล็อก
ภาพด้านล่างแสดงโครงการด้านบนที่แปลงเป็นบล็อกสวิตช์ โปรดทราบว่าความคิดเห็นใน Python เขียนด้วยสีเขียว คุณสามารถเขียนความคิดเห็นใน Python โดยป้อนเครื่องหมายปอนด์ (#) ตามด้วยความคิดเห็นของคุณ
เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป