
3과: '1'번으로 운전하세요
- VR 로봇을 시작 위치로 되돌리려면 놀이터를 재설정하세요.
-
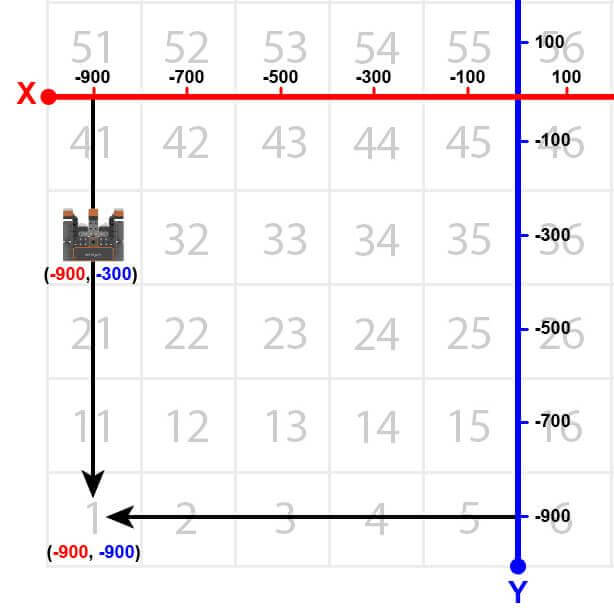
이제 VR 로봇은 숫자 그리드 맵 놀이터에서 숫자 '31'에 도달하면 돌아서 숫자 '1'로 돌아갑니다.
-
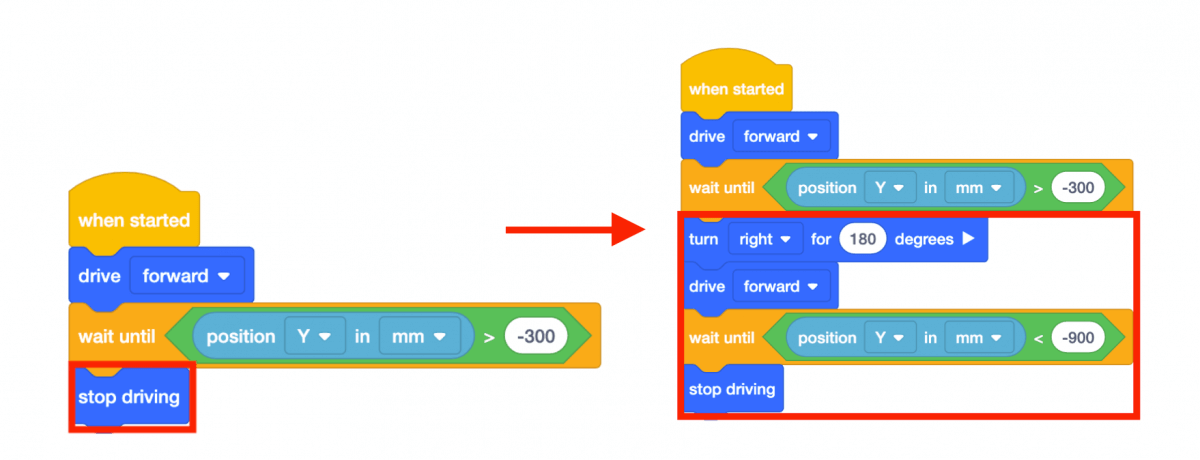
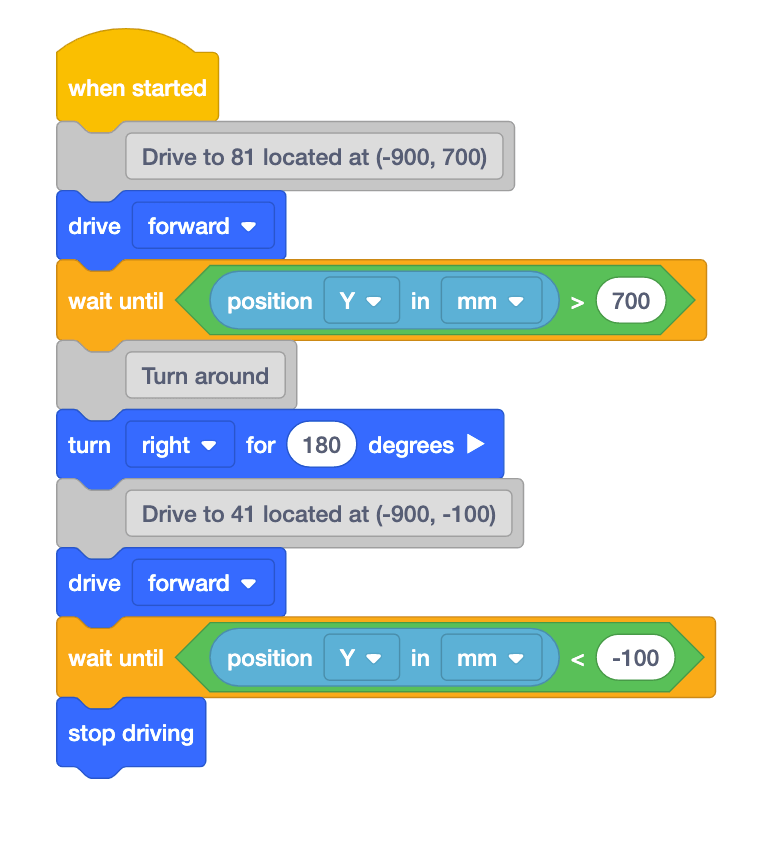
[운전정지] 블록을 제거하고 다음 블록으로 교체하세요.
-
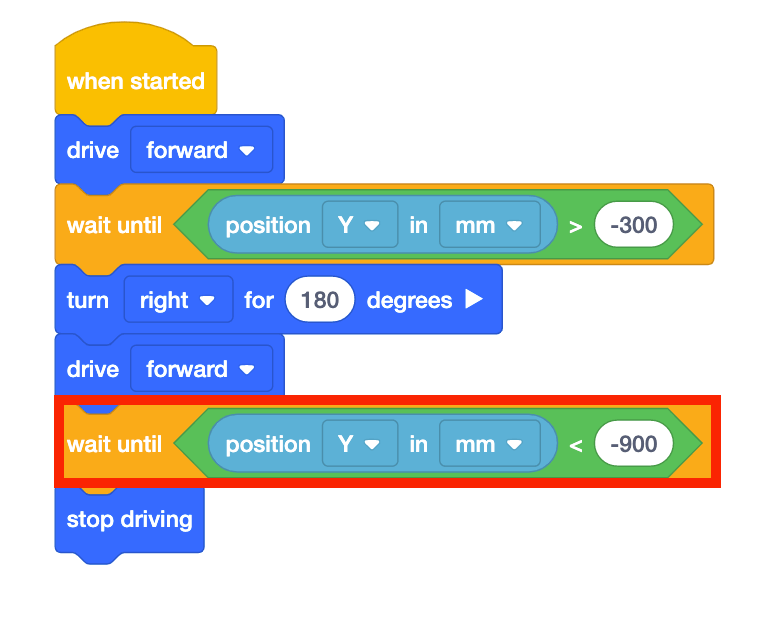
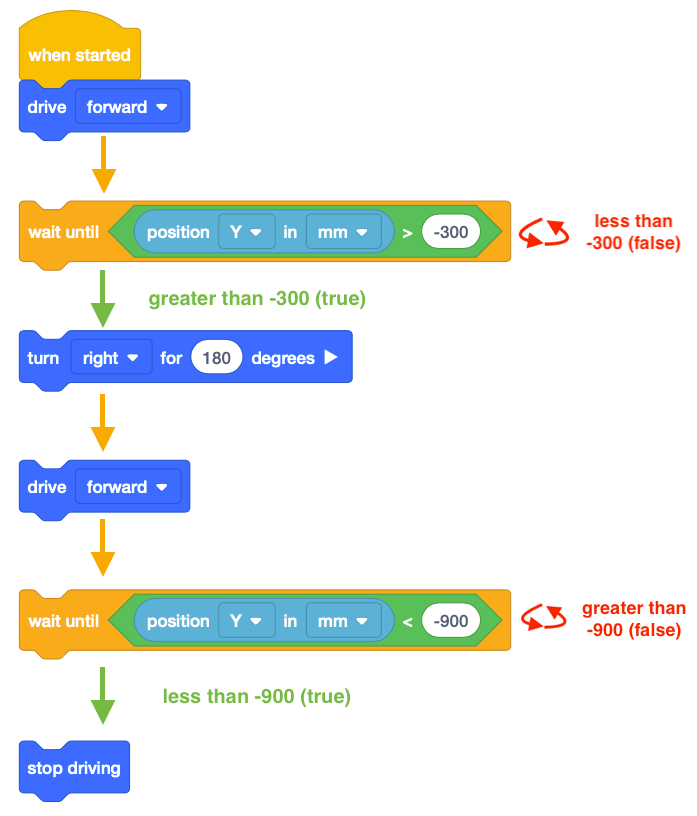
두 번째 [Waiting until] 블록에는 <Greater than> 블록 대신 <Less than> 블록이 포함되어 있다는 점에 유의하세요. 이는 VR 로봇이 이제 Y축을 따라 주행하고 있으며 숫자가 점점 더 음수로 변하고 있기 때문입니다. VR 로봇은 Y 값이 -900보다 작아지면 멈춥니다.
- 아직 열려 있지 않으면 Number Grid Map Playground 을 실행하고 프로젝트를 실행합니다.
- 번호 그리드 맵 놀이터에서 VR 로봇이 숫자 '1'을 향해 달리는 모습을 지켜보세요.
- 이 프로젝트에서 VR 로봇은 번호 그리드 맵 놀이터의 숫자 '1'을 향해 주행합니다. VR 로봇이 숫자 '1'로 이동할 때 Y 값은 에서 씩 감소하므로 이 프로젝트에서는 <Less than> 블록을 사용합니다.
-
VR 로봇은 해당 숫자가 있는 좌표의 Y 값보다 Y 값이 에서 만큼 작은 값이 되면 멈춥니다. 숫자 '1'의 Y 값은 -900이므로, Y 값이 -900보다 작아지면 VR 로봇의 주행이 중단됩니다.
귀하의 정보를 위해
주석은 일반적으로 프로그래머가 프로젝트의 각 부분에 무엇을 원하는지 설명하기 위해 프로젝트에 추가됩니다. 주석은 코드에 대한 맥락과 전반적인 의미를 제공하므로 협업과 문제 해결 시 유용합니다. 주석을 사용하면 프로그래머가 "추측하고 확인"하는 대신 프로젝트의 전반적인 목표와 의도에 대해 개념적으로 생각할 수 있습니다. 특정 숫자와 어떤 좌표가 일치하는지 기억하고 싶으신가요? "-900, 700에 위치한 81번 도로로 운전하세요."라는 코멘트를 추가합니다. 이는 프로젝트의 다양한 섹션과 블록에 대한 의사소통에 도움이 됩니다.
댓글에 대한 자세한 내용은 댓글 - VR 블록 문서를 참조하세요.
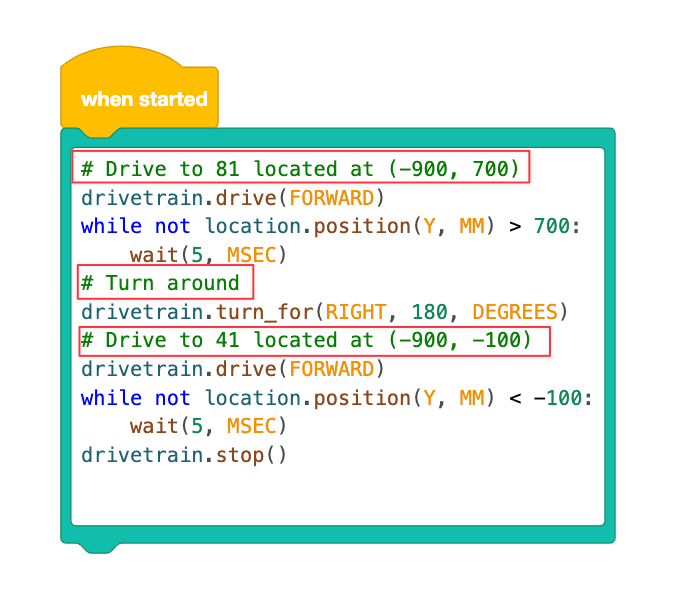
스위치 블록 사용
아래 이미지는 위의 프로젝트를 Switch 블록으로 변환한 것을 보여줍니다. Python의 주석은 녹색으로 표시됩니다. Python에서 주석을 작성하려면 파운드 기호(#) 뒤에 주석을 입력하면 됩니다.
이 강의의 나머지 부분을 계속하려면 다음 버튼을 선택하세요.