
Leçon 3 : Atteindre le numéro « 1 »
- Réinitialisez le terrain de jeu pour ramener le robot VR à la position de départ.
-
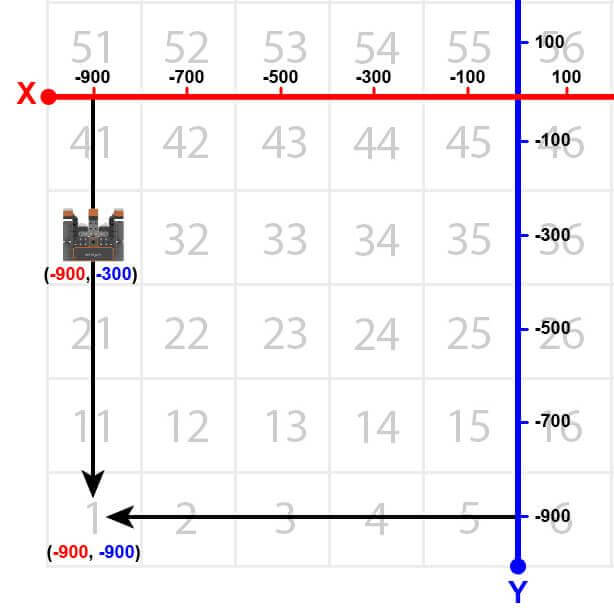
Maintenant, le robot VR fera demi-tour et reviendra au numéro « 1 » une fois qu'il aura atteint le numéro « 31 » sur le terrain de jeu de la carte de la grille numérique.
-
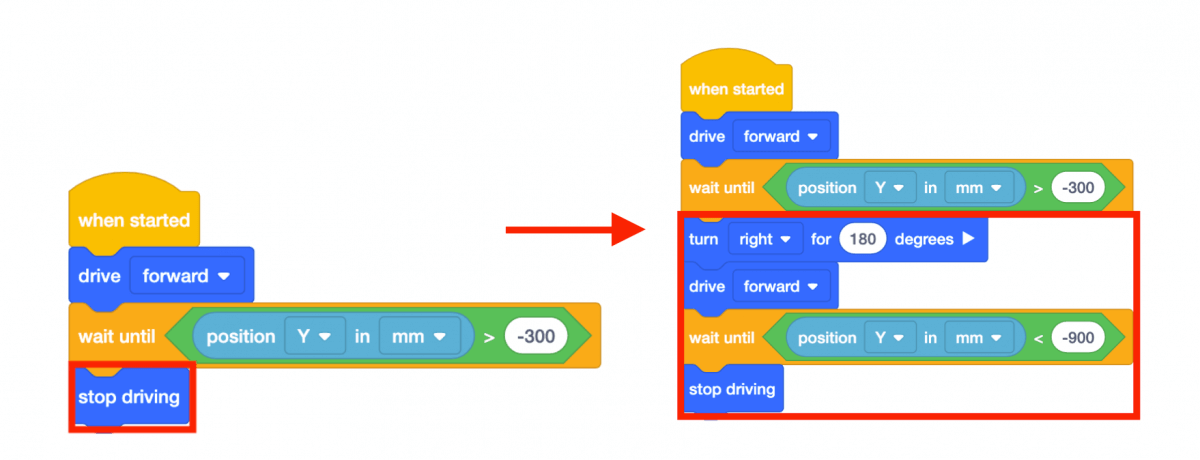
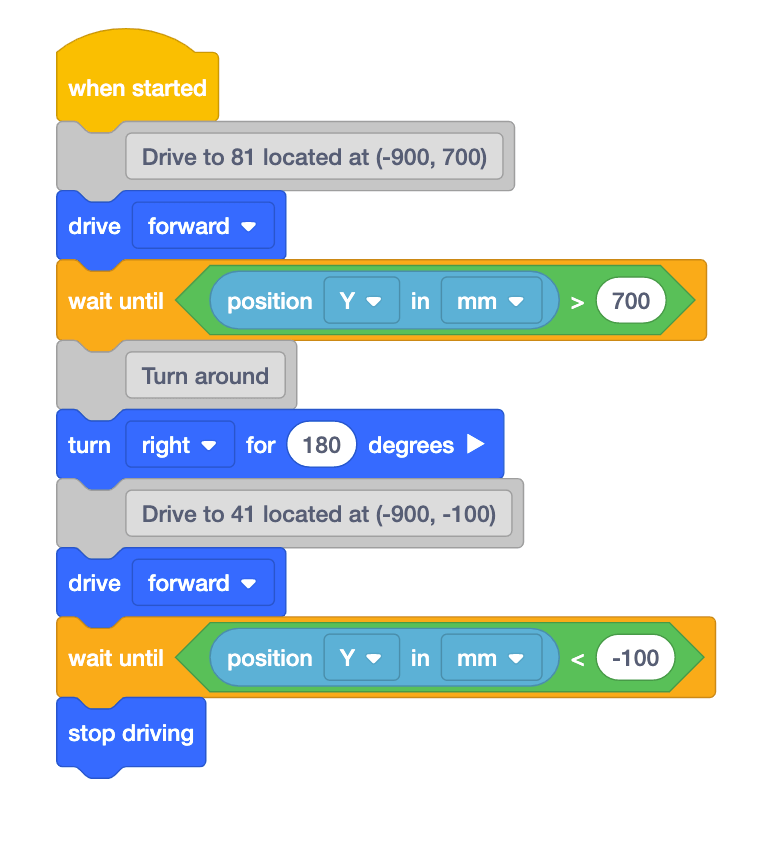
Retirez le bloc [Arrêter de conduire] et remplacez-le par les blocs suivants.
-
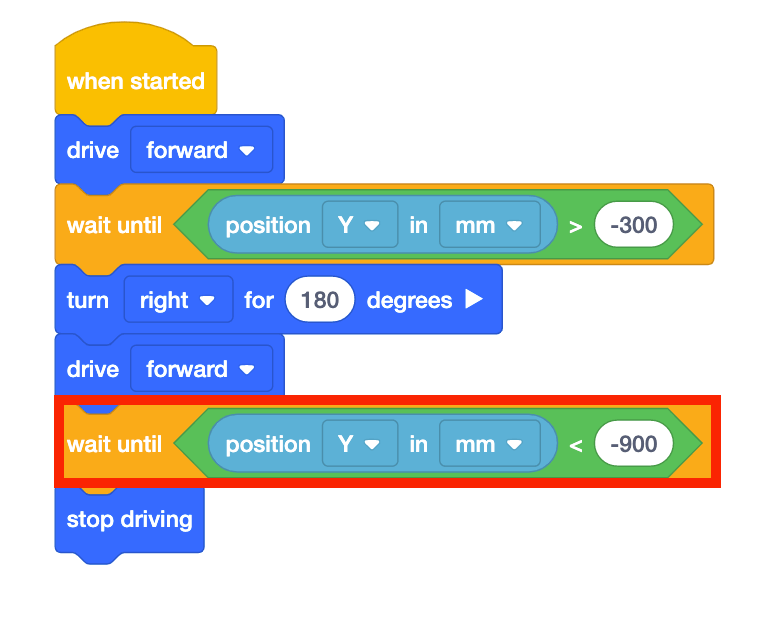
Notez que le deuxième bloc [Attendre jusqu'à] contient un <Less than> bloc au lieu d'un <Greater than> bloc. En effet, le robot VR descend maintenant l'axe Y et les chiffres deviennent de plus en plus négatifs. Le robot VR s'arrêtera une fois que les valeurs Y seront INFÉRIEURES à -900.
- Lancez le terrain de jeu Number Grid Map s'il n'est pas déjà ouvert et exécutez le projet.
- Regardez le lecteur VR Robot jusqu'au numéro « 1 » sur le terrain de jeu Number Grid Map.
- Dans ce projet, le robot VR se dirige vers le numéro « 1 » sur le terrain de jeu de la carte de la grille numérique. Étant donné que les valeurs Y diminuent à mesure que le robot VR atteint le nombre « 1 », le projet utilise un <Less than> bloc.
-
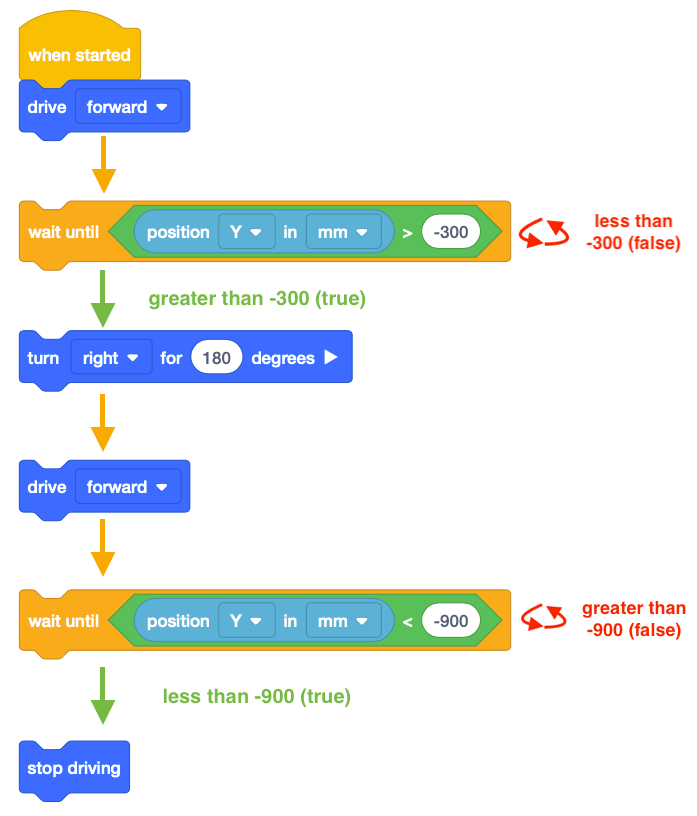
Le robot VR s'arrêtera une fois que sa valeur Y sera inférieure à la valeur Y de la coordonnée sur laquelle se trouve le nombre indiqué. Étant donné que la valeur Y du nombre « 1 » est de -900, le robot VR cessera de conduire une fois que la valeur Y sera inférieure à -900.
Pour votre information
Les commentaires sont généralement ajoutés aux projets pour expliquer ce qu'un programmeur veut que des parties d'un projet fassent. Les commentaires sont utiles lors de la collaboration et du dépannage, car ils fournissent un contexte et une signification globale au code. L'utilisation de commentaires permet au programmeur de réfléchir conceptuellement à l'objectif global et à l'intention du projet, au lieu d'essayer de « deviner et de vérifier ». Souhaitez-vous vous rappeler quelles coordonnées vont avec un certain nombre ? Ajoutez un commentaire disant « Conduisez jusqu'au 81 situé à (-900, 700). » Cela aide à communiquer les différentes sections et blocs du projet.
Pour plus d'informations sur les commentaires, consultez l'article Commentaires - VR Blocks .
Utilisation des blocs de commutation
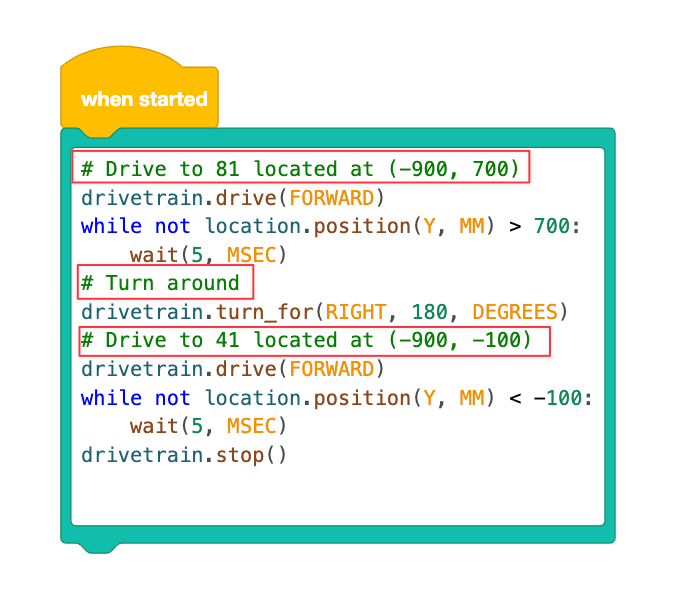
L'image ci-dessous montre le projet ci-dessus converti en bloc de commutation. Notez que les commentaires en Python sont écrits en vert. Vous pouvez écrire des commentaires en Python en entrant un signe dièse (#) suivi de votre commentaire.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.