
पाठ 3: नंबर '1' तक ड्राइव करें
- वीआर रोबोट को प्रारंभिक स्थिति में वापस लाने के लिए खेल के मैदान को रीसेट करें।
-
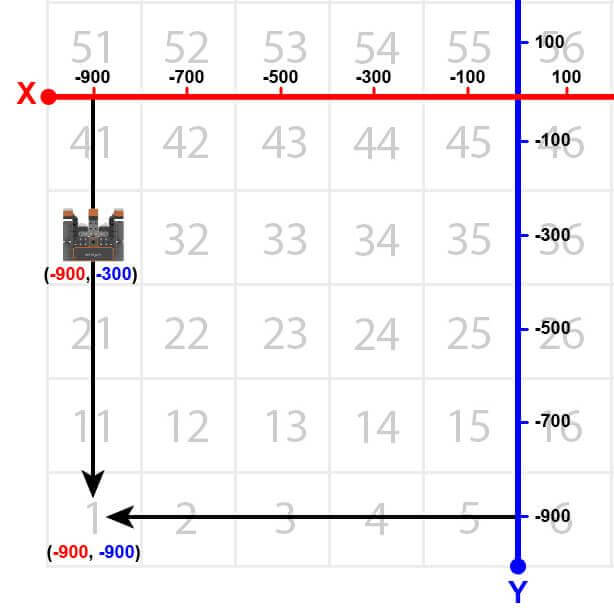
अब, वीआर रोबोट घूम जाएगा और नंबर ग्रिड मैप प्लेग्राउंडपर नंबर '31' तक पहुंचने के बाद नंबर '1' पर वापस आ जाएगा।
-
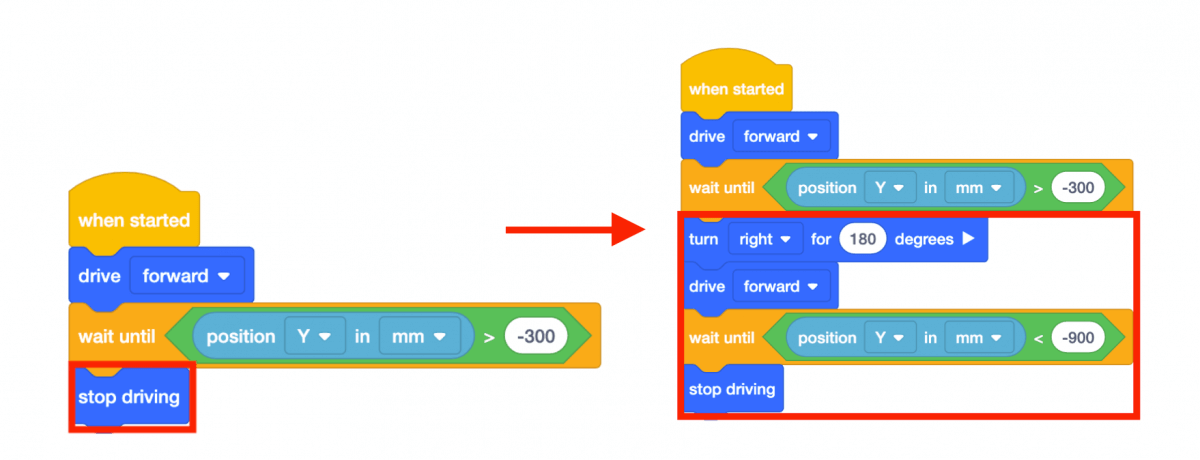
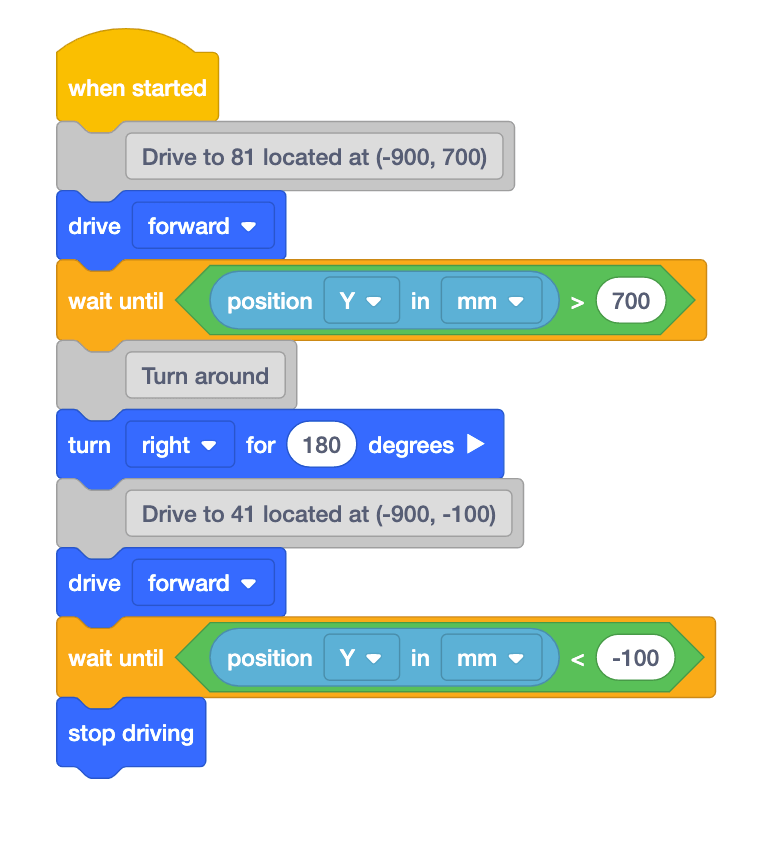
[ड्राइविंग रोकें] ब्लॉक को हटाएँ और इसे निम्नलिखित ब्लॉकों से बदलें।
-
ध्यान दें कि दूसरे [Wait until] ब्लॉक में <Greater than> ब्लॉक के बजाय <Less than> ब्लॉक है। ऐसा इसलिए है क्योंकि वीआर रोबोट अब वाई अक्ष पर नीचे की ओर जा रहा है और संख्याएं अधिक नकारात्मक होती जा रही हैं। जब Y-मान -900 से कम हो जाएगा तो VR रोबोट रुक जाएगा।
- यदि नंबर ग्रिड मैप प्लेग्राउंड पहले से खुला नहीं है तो उसे लॉन्च करें और प्रोजेक्ट चलाएं।
- नंबर ग्रिड मानचित्र खेल के मैदानपर नंबर '1' के लिए वी.आर. रोबोट ड्राइव देखें।
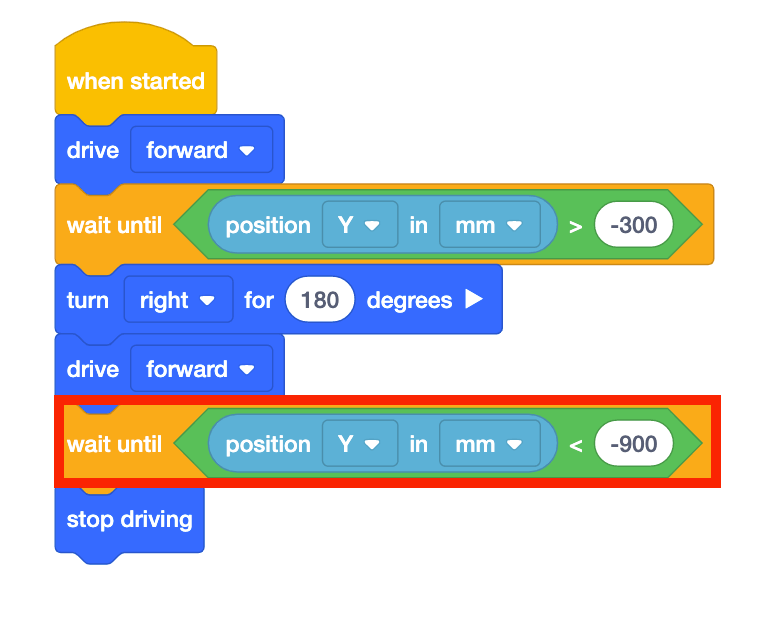
- इस परियोजना में, वीआर रोबोट नंबर ग्रिड मैप प्लेग्राउंडपर नंबर '1' तक ड्राइव करता है। चूंकि वाई-मान है, जो से घटता है, क्योंकि वीआर रोबोट संख्या '1' की ओर बढ़ता है, इसलिए परियोजना <Less than> ब्लॉक का उपयोग करती है।
-
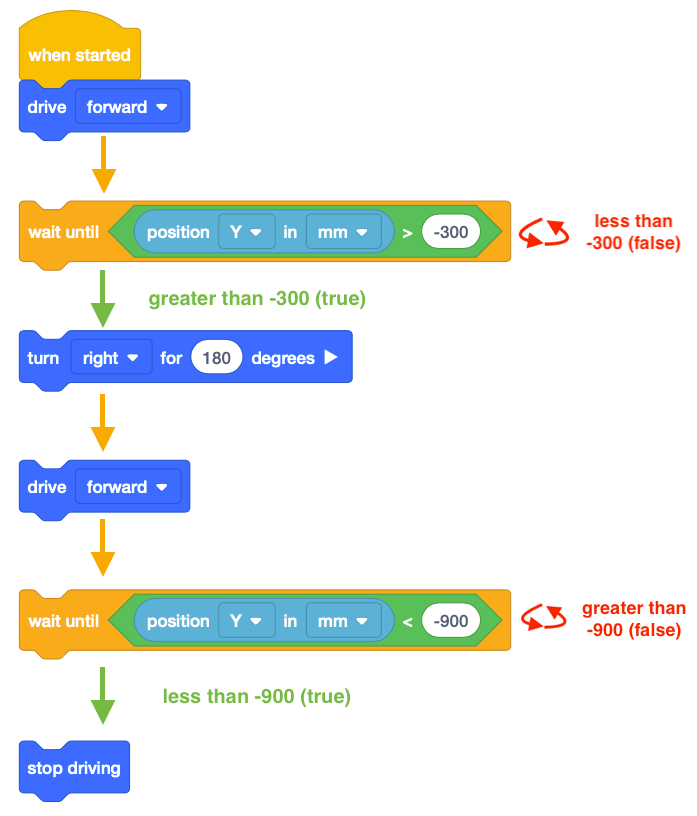
वीआर रोबोट तब रुक जाएगा जब उसका वाई-मान, उस निर्देशांक के वाई-मान से कम हो जाएगा जिस पर संकेतित संख्या स्थित है। चूंकि संख्या '1' का Y-मान -900 है, इसलिए Y-मान -900 से कम होने पर VR रोबोट गाड़ी चलाना बंद कर देगा।
आपकी जानकारी के लिए
आमतौर पर प्रोजेक्ट में टिप्पणियां इसलिए जोड़ी जाती हैं ताकि यह स्पष्ट किया जा सके कि प्रोग्रामर प्रोजेक्ट के किन भागों से क्या करवाना चाहता है। सहयोग और समस्या निवारण के समय टिप्पणियाँ सहायक होती हैं, क्योंकि वे कोड को संदर्भ और समग्र अर्थ प्रदान करती हैं। टिप्पणियों का उपयोग करने से प्रोग्रामर को “अनुमान लगाने और जांचने” की बजाय, परियोजना के समग्र लक्ष्य और इरादे के बारे में वैचारिक रूप से सोचने की अनुमति मिलती है। क्या आप याद रखना चाहते हैं कि किसी निश्चित संख्या के साथ कौन से निर्देशांक जुड़े होते हैं? “(-900, 700) पर स्थित 81 तक ड्राइव करें” कहते हुए एक टिप्पणी जोड़ें। इससे परियोजना के विभिन्न खंडों और ब्लॉकों के बारे में संवाद करने में मदद मिलती है।
टिप्पणियों के बारे में अधिक जानकारी के लिए, टिप्पणियाँ - वीआर ब्लॉक लेख देखें।
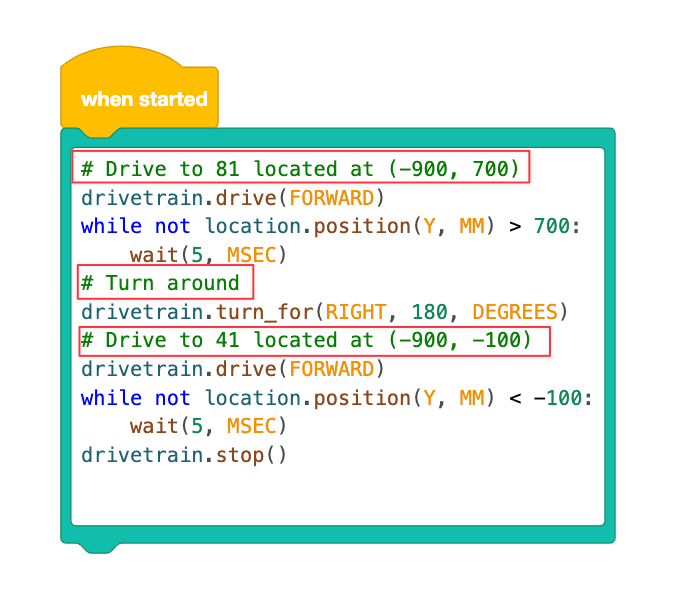
स्विच ब्लॉक का उपयोग करना
नीचे दी गई छवि उपरोक्त परियोजना को स्विच ब्लॉक में परिवर्तित दिखाती है। ध्यान दें कि पायथन में टिप्पणियाँ हरे रंग में लिखी जाती हैं। आप अपनी टिप्पणी के बाद पाउंड चिह्न (#) दर्ज करके पायथन में टिप्पणी लिख सकते हैं।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।