
পাঠ ৫: ডিস্ক মুভার চ্যালেঞ্জ
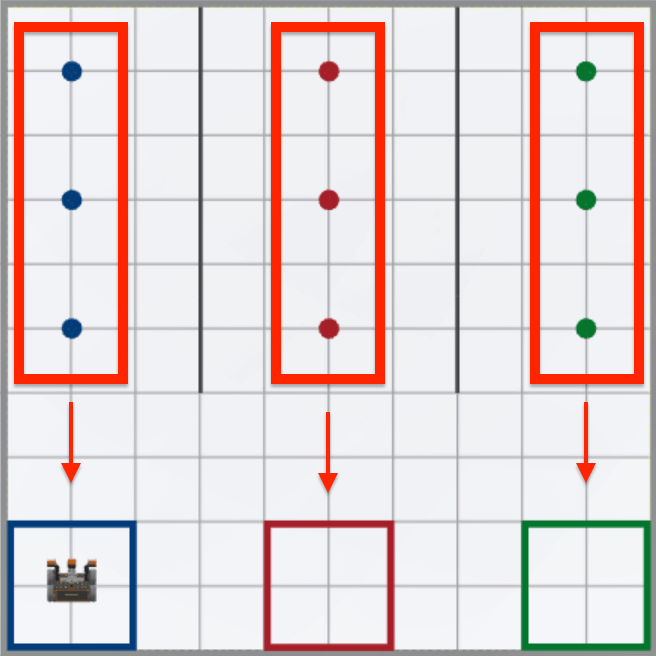
ডিস্ক মুভার চ্যালেঞ্জে, ভিআর রোবটকে প্রতিটি ডিস্ক তুলে ডিস্ক মুভার প্লেগ্রাউন্ডএ একই রঙের লক্ষ্যে নিয়ে যেতে ইলেক্ট্রোম্যাগনেট ব্যবহার করতে হবে। ডিস্ক মুভার চ্যালেঞ্জ সমাধানের জন্য আপনাকে নেস্টেড লুপ এবং ইলেক্ট্রোম্যাগনেট ব্যবহার করতে হবে, সাথে ড্রাইভট্রেন, সেন্সিং এবং কন্ট্রোল বিভাগের ব্লকও ব্যবহার করতে হবে।
শেখার ফলাফল
- VR রোবট সফলভাবে ডিস্ক মুভার চ্যালেঞ্জ সম্পূর্ণ করার জন্য সঠিক ক্রমানুসারে ড্রাইভট্রেন, সেন্সিং এবং কন্ট্রোল বিভাগ থেকে ব্লক প্রয়োগ করুন।
পুটিং ইট অল টুগেদার
এই ইউনিটটি ডিস্ক মুভার প্লেগ্রাউন্ডএ রঙিন ডিস্কগুলি বাছাই এবং নামাতে কীভাবে VR রোবটে ইলেক্ট্রোম্যাগনেট ব্যবহার করতে হয় তা অনুসন্ধান করে। এই ইউনিটটি পূর্ববর্তী ইউনিটগুলিতে শেখা দক্ষতাগুলিকেও একত্রিত করে যেমন একটি নতুন ব্লকের সাথে আই সেন্সর এবং দূরত্ব সেন্সর ব্যবহার করা, ডিস্ক মুভার প্লেগ্রাউন্ড নেভিগেট করতে এবং ডিস্কগুলি বাছাই করার জন্য [পর্যন্ত পুনরাবৃত্তি করুন] ব্লক।
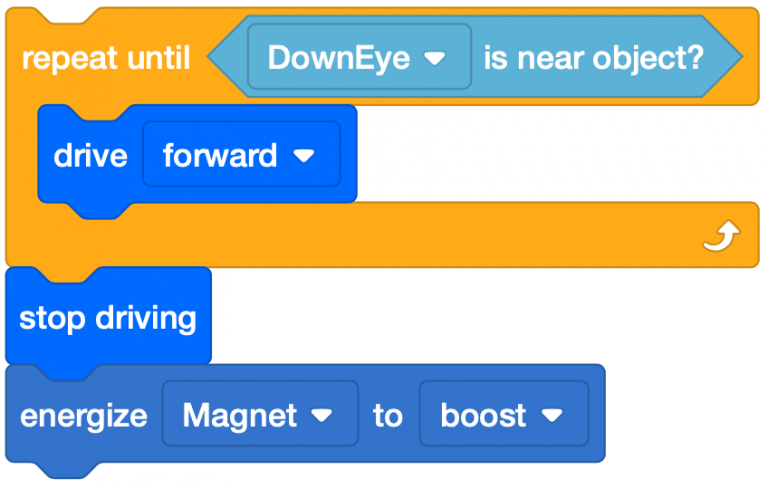
এই ইউনিটের কার্যক্রমের জন্য অনেক পুনরাবৃত্তিমূলক আন্দোলনের প্রয়োজন হয়। VEXcode VR প্রকল্পগুলিতে লুপ এবং নেস্টেড লুপগুলি ব্যবহার করে ব্যবহারকারীকে প্রকল্পের প্রবাহ নিয়ন্ত্রণ করতে এবং পুনরাবৃত্ত কমান্ডের একটি দীর্ঘ তালিকাকে কয়েকটিতে ছোট করে। লুপগুলি বুলিয়ান রিপোর্টার ব্লকগুলির সাথেও ব্যবহার করা যেতে পারে, ভিআর রোবটকে তার পরিবেশের মূল্যায়ন এবং প্রতিক্রিয়া জানাতে দেয়, যেমন ডাউন আই সেন্সর যখন একটি ডিস্ক সনাক্ত করে তখন ইলেক্ট্রোম্যাগনেটকে থামানো এবং শক্তিশালী করা।
একটি লুপ অন্য লুপের ভিতরে স্থাপন করাকে 'নেস্টিং' বলা হয়। যখন লুপগুলি নেস্ট করা হয়, তখন বাইরের লুপটি ভিতরের লুপটি কতবার কার্যকর করে তা নিয়ন্ত্রণ করে। নেস্টেড লুপগুলি এমন প্রকল্পগুলিতে সহায়ক যেখানে একটি ভিআর রোবট একই আচরণ একাধিকবার পুনরাবৃত্তি করে। নেস্টিং লুপগুলি একটি প্রকল্পকে সংগঠিত করে এবং ঘনীভূত করে।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।