
പാഠം 5: ഡിസ്ക് മൂവർ ചലഞ്ച്
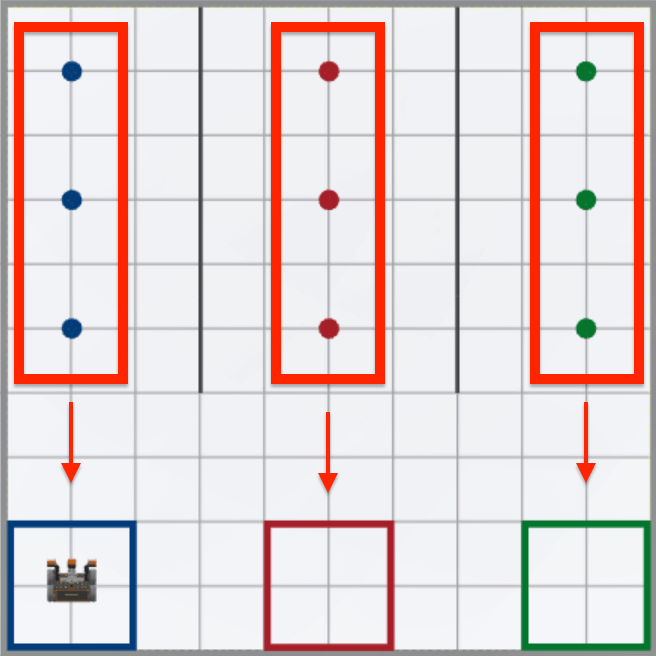
ഡിസ്ക് മൂവർ ചലഞ്ചിൽ, വിആർ റോബോട്ട് ഓരോ ഡിസ്കും എടുത്ത് ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട്ലെ അതേ നിറത്തിലുള്ള ലക്ഷ്യത്തിലേക്ക് നീക്കാൻ ഇലക്ട്രോമാഗ്നറ്റ് ഉപയോഗിക്കണം. ഡിസ്ക് മൂവർ വെല്ലുവിളി പരിഹരിക്കാൻ നിങ്ങൾ ഡ്രൈവ്ട്രെയിൻ, സെൻസിംഗ്, കൺട്രോൾ വിഭാഗങ്ങളിൽ നിന്നുള്ള ബ്ലോക്കുകൾക്കൊപ്പം നെസ്റ്റഡ് ലൂപ്പുകളും ഇലക്ട്രോമാഗ്നറ്റും ഉപയോഗിക്കേണ്ടതുണ്ട്.
പഠന ഫലം
- VR റോബോട്ട് ഡിസ്ക് മൂവർ ചലഞ്ച് വിജയകരമായി പൂർത്തിയാക്കുന്നതിന്, ഡ്രൈവ്ട്രെയിൻ, സെൻസിംഗ്, കൺട്രോൾ വിഭാഗങ്ങളിൽ നിന്നുള്ള ബ്ലോക്കുകൾ ശരിയായ ക്രമത്തിൽ പ്രയോഗിക്കുക.
എല്ലാം ഒരുമിച്ച് ചേർക്കൽ
ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട്ലെ നിറമുള്ള ഡിസ്കുകൾ എടുത്ത് താഴെ വയ്ക്കുന്നതിന് VR റോബോട്ടിലെ ഇലക്ട്രോമാഗ്നറ്റ് എങ്ങനെ ഉപയോഗിക്കാമെന്ന് ഈ യൂണിറ്റ് പര്യവേക്ഷണം ചെയ്യുന്നു. ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട് നാവിഗേറ്റ് ചെയ്യുന്നതിനും ഡിസ്കുകൾ എടുക്കുന്നതിനുമായി [Repeat until] ബ്ലോക്ക് എന്ന പുതിയ ബ്ലോക്കുമായി ഐ സെൻസർ, ഡിസ്റ്റൻസ് സെൻസർ എന്നിവ ഉപയോഗിക്കുന്നത് പോലുള്ള മുൻ യൂണിറ്റുകളിൽ പഠിച്ച കഴിവുകൾ ഈ യൂണിറ്റ് സംയോജിപ്പിക്കുന്നു.
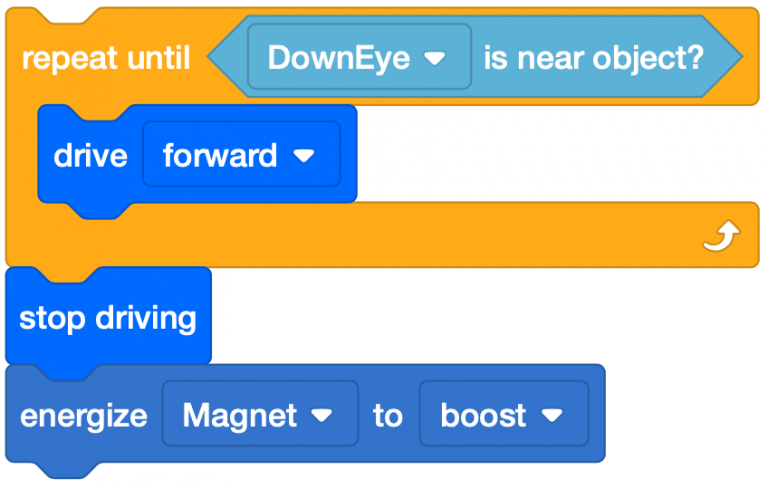
ഈ യൂണിറ്റിലെ പ്രവർത്തനങ്ങൾക്ക് നിരവധി ആവർത്തിച്ചുള്ള ചലനങ്ങൾ ആവശ്യമാണ്. VEXcode VR പ്രോജക്റ്റുകളിൽ ലൂപ്പുകളും നെസ്റ്റഡ് ലൂപ്പുകളും ഉപയോഗിക്കുന്നത് ഉപയോക്താവിന് പ്രോജക്റ്റ് ഫ്ലോ നിയന്ത്രിക്കാനും ആവർത്തിച്ചുള്ള കമാൻഡുകളുടെ ഒരു നീണ്ട പട്ടിക ചുരുക്കാനും അനുവദിക്കുന്നു. ബൂളിയൻ റിപ്പോർട്ടർ ബ്ലോക്കുകൾക്കൊപ്പം ലൂപ്പുകളും ഉപയോഗിക്കാം, ഇത് VR റോബോട്ടിനെ അതിന്റെ പരിസ്ഥിതിയെ വിലയിരുത്താനും പ്രതികരിക്കാനും അനുവദിക്കുന്നു, ഉദാഹരണത്തിന് ഡൗൺ ഐ സെൻസർ ഒരു ഡിസ്ക് കണ്ടെത്തുമ്പോൾ ഇലക്ട്രോമാഗ്നറ്റിനെ നിർത്തി ഊർജ്ജസ്വലമാക്കുക.
ഒരു ലൂപ്പ് മറ്റൊരു ലൂപ്പിനുള്ളിൽ സ്ഥാപിക്കുന്നതിനെ 'നെസ്റ്റിംഗ്' എന്ന് വിളിക്കുന്നു. ലൂപ്പുകൾ നെസ്റ്റ് ചെയ്യുമ്പോൾ, അകത്തെ ലൂപ്പ് എത്ര തവണ എക്സിക്യൂട്ട് ചെയ്യുന്നു എന്നതിന്റെ നിയന്ത്രണം പുറം ലൂപ്പ് ഏറ്റെടുക്കുന്നു. ഒരു വിആർ റോബോട്ട് ഒരേ പെരുമാറ്റങ്ങൾ ഒന്നിലധികം തവണ ആവർത്തിക്കുന്ന പ്രോജക്റ്റുകളിൽ നെസ്റ്റഡ് ലൂപ്പുകൾ സഹായകരമാണ്. നെസ്റ്റിംഗ് ലൂപ്പുകൾ ഒരു പ്രോജക്റ്റ് സംഘടിപ്പിക്കുകയും ഘനീഭവിപ്പിക്കുകയും ചെയ്യുന്നു.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.