
Leçon 5 : Défi de déménagement de disque
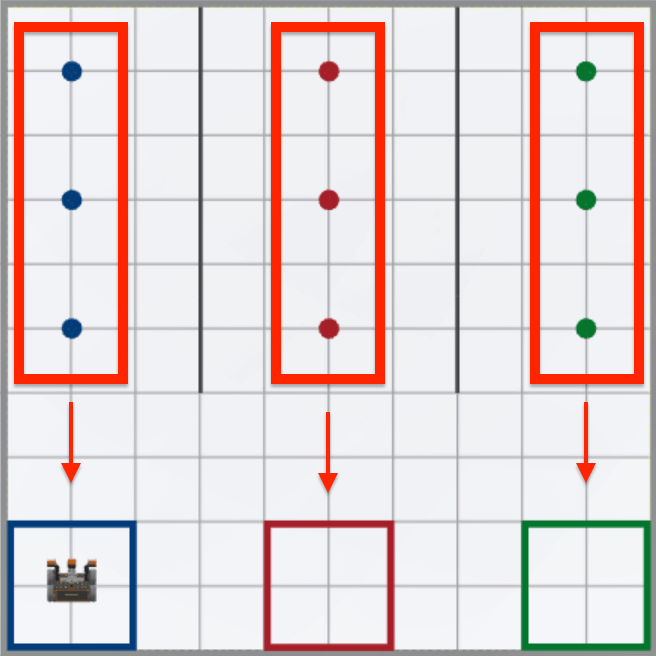
Dans le Disk Mover Challenge, le robot VR doit utiliser l'électroaimant pour saisir chaque disque et le déplacer vers le but de la même couleur sur le terrain de jeu Disk Mover. Vous devrez utiliser des boucles imbriquées et l'électroaimant ainsi que des blocs des catégories Drivetrain, Sensing et Control pour résoudre le défi Disk Mover.
Résultat d'apprentissage
- Appliquez les blocs des catégories Transmission, Détection et Contrôle dans le bon ordre afin que le robot VR réussisse le défi de déplacement de disque.
Tout mettre ensemble
Cette unité explore comment utiliser l'électro-aimant sur le robot VR pour ramasser et déposer des disques colorés sur le terrain de jeu Disk Mover. Cette unité combine également les compétences acquises dans les unités précédentes telles que l'utilisation du capteur oculaire et du capteur de distance avec un nouveau bloc, le bloc [Répéter jusqu'à] pour naviguer dans le terrain de jeu du déplaceur de disque et pour ramasser des disques.
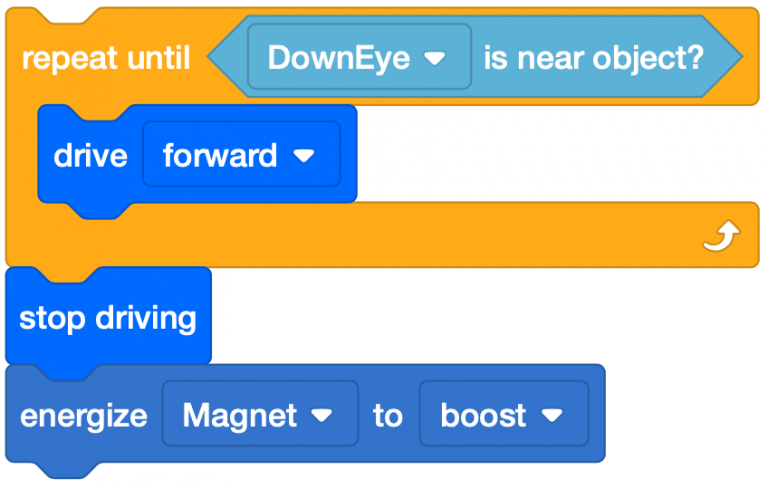
Les activités de cette unité nécessitent de nombreux mouvements répétitifs. L'utilisation de boucles et de boucles imbriquées dans les projets VEXcode VR permet à l'utilisateur de contrôler le flux du projet et de raccourcir une longue liste de commandes répétées en quelques unes. Les boucles peuvent également être utilisées avec des blocs rapporteurs booléens, permettant au robot VR d'évaluer et de répondre à son environnement, comme l'arrêt et la mise sous tension de l'électroaimant lorsque le capteur Down Eye détecte un disque.
Placer une boucle à l'intérieur d'une autre boucle s'appelle « imbrication ». Lorsque les boucles sont imbriquées, la boucle externe prend le contrôle du nombre de fois que la boucle interne s'exécute. Les boucles imbriquées sont utiles dans les projets où un robot VR répète les mêmes comportements plus d'une fois. Nesting Loops organise et condense un projet.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.