
परिचय
इस पाठ में आप ऑप्टिकल सेंसर के बारे में जानेंगे, और यह कैसे एक प्रोजेक्ट में [यदि तो] और [दोहराएँ] ब्लॉक के साथ इस्तेमाल किया जा सकता है ताकि आपके क्लॉबॉट अपने रंग के आधार पर एक बकीबॉल एकत्र कर सकें। फिर आप ट्रेजर मूवर चैलेंज में प्रतिस्पर्धा करने के लिए जो कुछ भी सीखा है उसे लागू करेंगे, जहां आपके रोबोट को केवल लाल ट्रेजर बकीबॉल इकट्ठा करने की आवश्यकता होगी। ट्रेजर मूवर चैलेंज में एक सफल रन के दौरान एक रोबोट कैसे स्वायत्त रूप से आगे बढ़ सकता है, इसका एक उदाहरण देखने के लिए नीचे दिए गए एनीमेशन को देखें।
इस एनीमेशन में, क्लॉबोट फील्ड की बाईं दीवार के साथ शुरू होता है। रोबोट के बाईं ओर दीवार के सामने, प्रत्येक काली रेखा पर दो बकीबॉल रखे गए हैं। दूसरा बकीबॉल लाल है। रोबोट बार-बार काली रेखा की ओर आगे बढ़ता है, बायीं ओर मुड़ता है, और प्रत्येक बकीबॉल का रंग पता लगाने के लिए आगे बढ़ता है। यदि बकीबॉल लाल नहीं है, तो रोबोट पीछे मुड़ता है, दाईं ओर मुड़ता है, और अपना पैटर्न जारी रखता है। यदि बकीबॉल लाल है, तो रोबोट उसे अपने पंजे में पकड़ लेता है, पीछे की ओर मुड़ता है, घूम जाता है, और बकीबॉल को विपरीत दीवार पर पहुंचाने के लिए आगे बढ़ता है। टाइमर तब तक चलता रहता है जब तक रोबोट सभी पांच बकीबॉल्स का रंग जांच नहीं लेता, लगभग 28 सेकंड।
एक ऑप्टिकल सेंसर जोड़ें
इस पाठ में, आप सेंसर फीडबैक के बारे में सीखेंगे और जानेंगे कि आप उस फीडबैक का उपयोग करके अपने रोबोट को कैसे कोड कर सकते हैं।
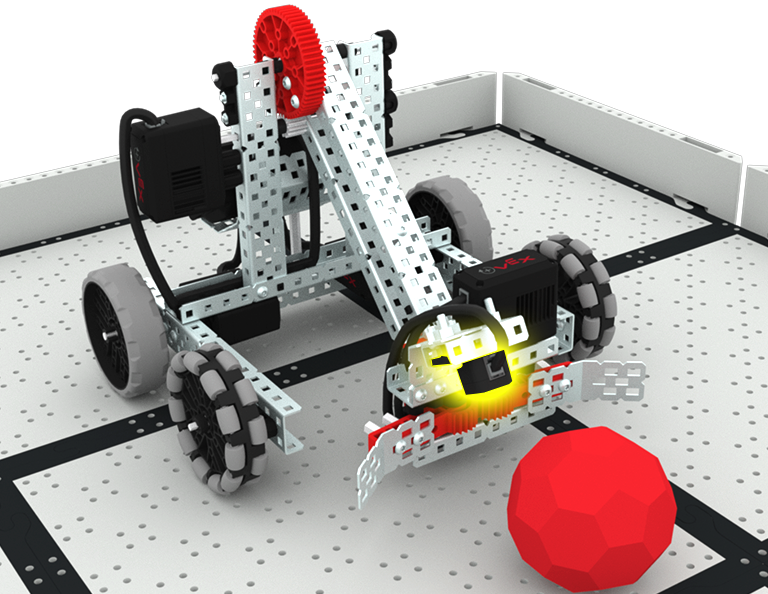
इस छवि में दिखाए अनुसार अपने क्लॉबोट में एक ऑप्टिकल सेंसर जोड़ें।
- 1x2x1x4 सी-चैनल को ऑप्टिकल सेंसर से कनेक्ट करें।
- सी-चैनल को कोणीय गसेट पर माउंट करें, फिर इसे पंजे से जोड़ें।
ऑप्टिकल सेंसर और उन ब्लॉकों के बारे में जानने के लिएअगला >चुनें जिनका उपयोग आप लाल बकीबॉल इकट्ठा करने के लिए एक प्रोजेक्ट बनाने के लिए कर सकते हैं।