
Perkenalan
Dalam Pelajaran ini Anda akan mempelajari tentang Sensor Optik, dan bagaimana sensor tersebut dapat digunakan dengan blok [Jika maka] dan [Ulangi] dalam sebuah proyek untuk membuat Clawbot Anda mengumpulkan Buckyball berdasarkan warnanya. Kemudian Anda akan menerapkan apa yang telah Anda pelajari untuk berkompetisi di Treasure Mover Challenge, di mana robot Anda hanya perlu mengumpulkan Treasure Buckyball merah. Saksikan animasi di bawah ini untuk melihat contoh bagaimana robot dapat bergerak secara otonom selama berhasil mengikuti Treasure Mover Challenge.
Dalam animasi ini, Clawbot mulai berjalan di sepanjang dinding kiri Lapangan. Ada dua Buckyball yang ditempatkan di dinding sebelah kiri robot, di setiap garis hitam. Buckyball kedua berwarna merah. Robot berulang kali melaju ke depan menuju garis hitam, berbelok ke kiri, dan melaju ke depan untuk mendeteksi warna setiap Buckyball. Jika Buckyball tidak berwarna merah, robot akan berbalik arah, berbelok ke kanan, dan melanjutkan polanya. Jika Buckyball berwarna merah, robot akan mencengkeramnya dengan cakarnya, berbalik, berputar, dan melaju untuk melemparkan Buckyball ke dinding seberang. Pengatur waktu berjalan hingga robot memeriksa warna kelima Buckyball, sekitar 28 detik.
Tambahkan Sensor Optik
Dalam Pelajaran ini, Anda mempelajari tentang umpan balik sensor dan bagaimana Anda dapat membuat kode robot menggunakan umpan balik tersebut.
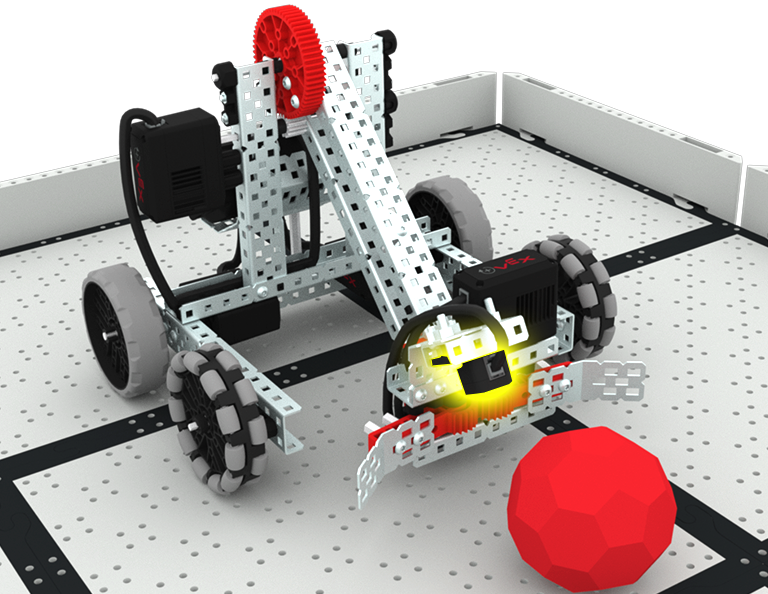
Tambahkan Sensor Optik ke Clawbot Anda seperti yang ditunjukkan dalam gambar ini.
- Hubungkan Saluran-C 1x2x1x4 ke Sensor Optik.
- Pasangkan C-Channel pada gusset bersudut, lalu pasangkan pada cakar.
PilihBerikutnya >untuk mempelajari tentang Sensor Optik dan balok yang dapat Anda gunakan untuk membangun proyek guna mengumpulkan Buckyball merah.