
খেলা
পর্ব ১ - ধাপে ধাপে
- নির্দেশনাশিক্ষার্থীদের এমন একটি প্রকল্প তৈরি করতে নির্দেশ দিন যেখানে রোবট আর্ম একটি ডিস্ক সনাক্ত না হওয়া পর্যন্ত অপেক্ষা করবে (আই সেন্সর ব্যবহার করে), তারপর ইলেক্ট্রোম্যাগনেট ব্যবহার করে ডিস্কটি সরান। রোবট আর্ম কীভাবে ডিস্কটিকে সফলভাবে নাড়াতে পারে তা দেখতে নিচের ভিডিওটি দেখুন, প্রথমে এটিকে সেন্সিং করে এবং তারপর ইলেক্ট্রোম্যাগনেট ব্যবহার করে ডানদিকে স্লাইড করে।
ভিডিও ফাইল
- মডেল[অপেক্ষা করুন] ব্লক এবং আই সেন্সর ব্যবহার করে কীভাবে একটি প্রকল্প তৈরি করবেন তার মডেল। শিক্ষার্থীদের একটি প্রজেক্টেড স্ক্রিনে অথবা ল্যাব 4 স্লাইডশোর মাধ্যমে আপনার সাথে অনুসরণ করতে বলুন।
- শুরু করার আগে, নিশ্চিত করুন যে শিক্ষার্থীরা তাদের ডিভাইস তাদের রোবট আর্ম (2-অক্ষ) এর সাথে সংযুক্ত করেছে এবং রোবট আর্মটি কনফিগার করা আছে। প্রয়োজনে, এই প্রবন্ধের ধাপগুলি মডেল করুন একটি রোবট আর্ম কনফিগার করুন যাতে শিক্ষার্থীদের তাদের রোবট আর্ম কনফিগার করার প্রক্রিয়ায় গাইড করা যায়।
দ্রষ্টব্য: আপনি যখন প্রথমে আপনার রোবোট আর্মকে আপনার ডিভাইসে সংযুক্ত করেন, তখন মস্তিষ্কে নির্মিত গিরো ক্রমাঙ্কন করতে পারে, যার ফলে রোবট আর্মটি কিছুক্ষণের জন্য নিজেই নড়াচড়া করতে পারে । এটি একটি প্রত্যাশিত আচরণ, ক্যালিব্রেট করার সময় রোবট আর্ম স্পর্শ করবেন না।
- শিক্ষার্থীদের তাদের ল্যাব 3 পার্ট 2 প্রজেক্ট খুলতে বলুন । নতুন প্রকল্পটি এই প্রকল্পের উপর ভিত্তি করে গড়ে উঠবে । "হিসাবে সেভ করুন" বা "আপনার ডিভাইসে সেভ করুন" বেছে নিন (আপনি যে VEXcode GO সংস্করণটি ব্যবহার করছেন তার উপর নির্ভর করে) এবং প্রজেক্ট ল্যাব 4 পার্ট 1 এর নাম পরিবর্তন করুন ।
 প্রকল্পের
প্রকল্পের নাম পরিবর্তন করুন - যদি এমন কোনও শিক্ষার্থী থাকে যারা ল্যাব 3 এর জন্য উপস্থিত ছিল না বা তাদের প্রকল্পটি খুঁজে পায় না, তবে তাদের ল্যাব 4 চিত্র স্লাইডশো থেকে ল্যাব 3 পার্ট 2 সমাধানটি পুনরায় তৈরি করুন ।
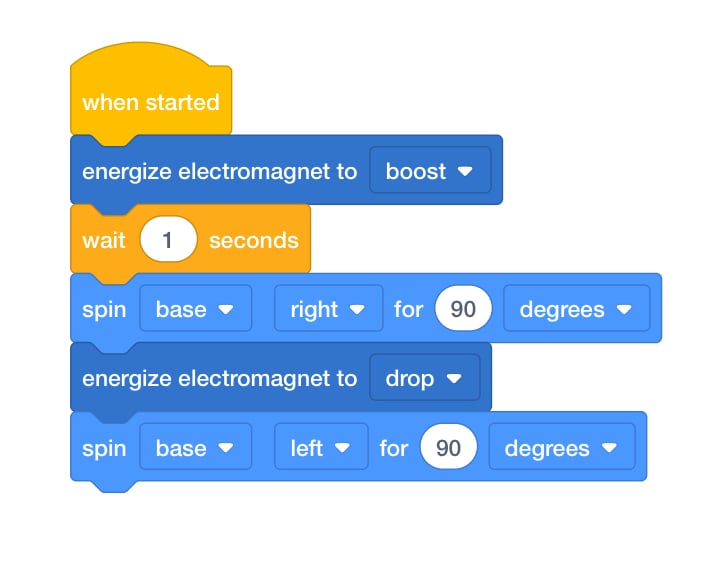
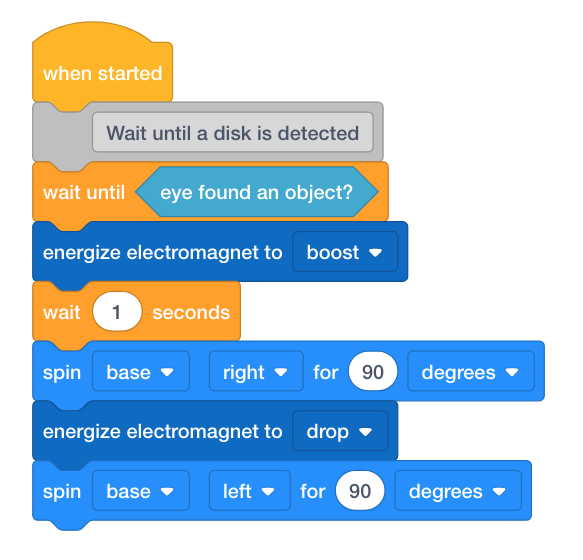
ল্যাব 3 পার্ট 2 সলিউশন - কর্মক্ষেত্রে [অপেক্ষা করুন] ব্লকটি টেনে আনুন । ব্যাখ্যা করুন যে [অপেক্ষা করুন] ব্লক বুলিয়ান শর্তগুলি গ্রহণ করে এবং ব্লকটি ভিতরে একটি শর্ত ‘সত্য‘ হিসাবে রিপোর্ট না করা পর্যন্ত প্রকল্পটি চালানো বন্ধ করবে ।
 ব্লক হওয়া পর্যন্ত অপেক্ষা
ব্লক হওয়া পর্যন্ত অপেক্ষা করুন -
এই প্রকল্পটি কোনও বস্তু উপস্থিত কিনা তা সনাক্ত করতে আই সেন্সর ব্যবহার করবে, যাতে এটি পিক আপ করা যায় । আই সেন্সর ডেটা হল বুলিয়ান অবস্থা যার জন্য আমরা অপেক্ষা করছি ।

আই সেন্সর -
‘সেন্সিং‘ এর অধীনে টুলবক্সে <Eye found object> ব্লকটি খুঁজুন । ব্যাখ্যা করুন যে <Eye found object> এটি একটি বুলিয়ান ব্লক যা সত্য বা মিথ্যা রিপোর্ট করবে, তাই এটি [অপেক্ষা করুন] ব্লকের সাথে ব্যবহার করা যেতে পারে ।
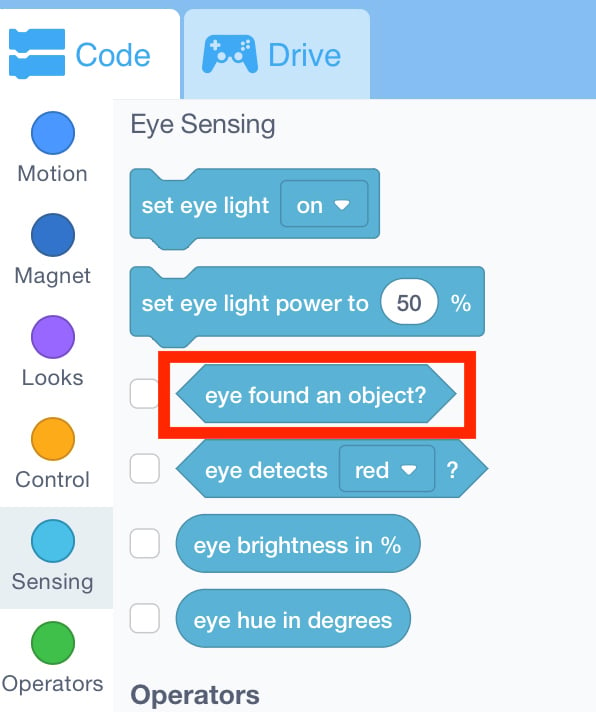
আই সেন্সিং ক্যাটাগরি - [অপেক্ষা <Eye found object> করুন] ব্লকে টেনে আনুন ।
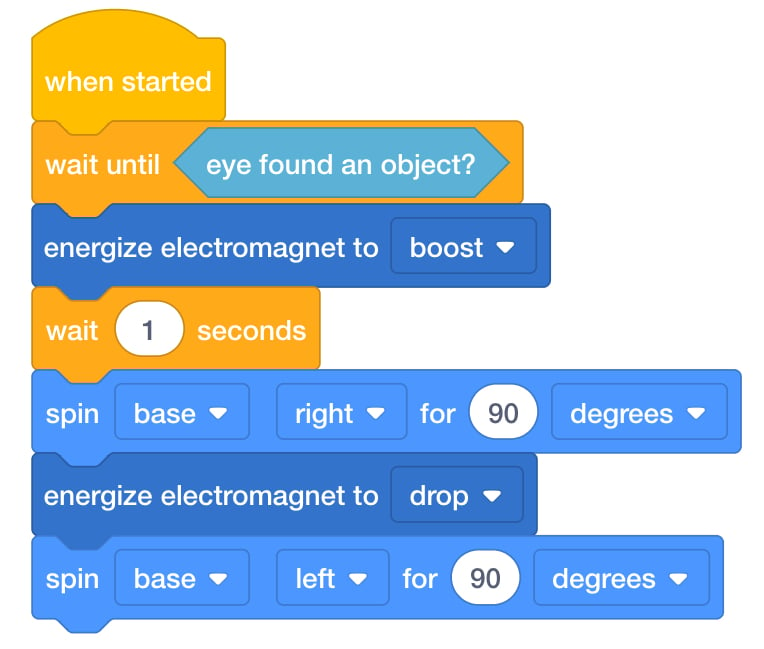
 [ <Eye Found Object> পর্যন্ত অপেক্ষা করুন]
[ <Eye Found Object> পর্যন্ত অপেক্ষা করুন] -এ যোগ করুন - শিক্ষার্থীদের জিজ্ঞাসা করুন যে তারা কোন বস্তুর জন্য আই সেন্সর কোথায় পরীক্ষা করতে চান? [Wait until] ব্লকটি প্রজেক্টের শুরুতে টেনে আনুন।
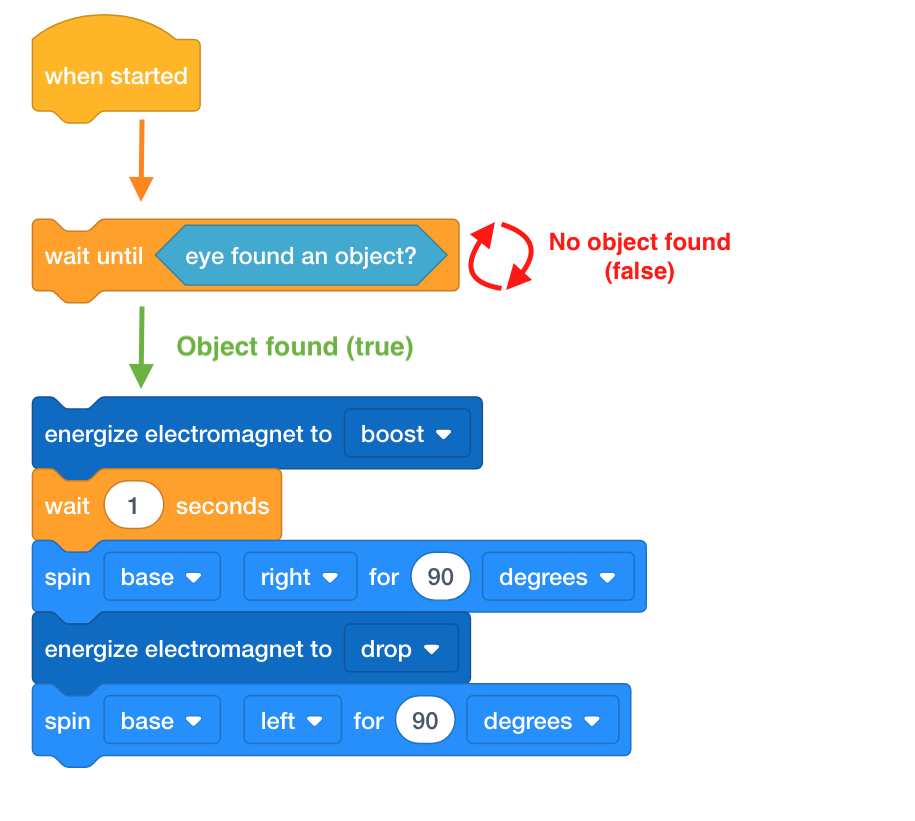
ল্যাব 4 পার্ট 1 সলিউশন - শিক্ষার্থীদের ইলেক্ট্রোম্যাগনেটে একটি ডিস্ক রাখুন এবং প্রকল্পটি শুরু করুন এবং দেখুন তাদের রোবট আর্ম কীভাবে চলে । তাদের ইলেক্ট্রোম্যাগনেটের সাথে সংযুক্ত একটি ডিস্ক দিয়ে প্রকল্পটি শুরু করা উচিত । আই সেন্সর ব্যবহার করে তাদের যদি কোনও সমস্যা হয় তবে তাদের এই পদক্ষেপগুলি আবার অনুসরণ করতে বলুন । প্রয়োজনে, "VEXcode GOএ একটি প্রকল্প শুরু করা প্রবন্ধটি দেখুন এবং শিক্ষার্থীদের জন্য এই প্রবন্ধের ধাপগুলি মডেল করুন যাতে তারা একটি প্রকল্প শুরু করতে পারে।
- শিক্ষার্থীরা তাদের কোড পরীক্ষা করার সময় প্রকল্প প্রবাহ সম্পর্কে কথোপকথন সহজতর করুন । আপনি সঞ্চালিত হওয়ার সাথে সাথে তাদের প্রকল্পগুলি পরীক্ষা করতে ল্যাব 4 স্লাইডশোতে প্রদত্ত সমাধানটি ব্যবহার করুন ।
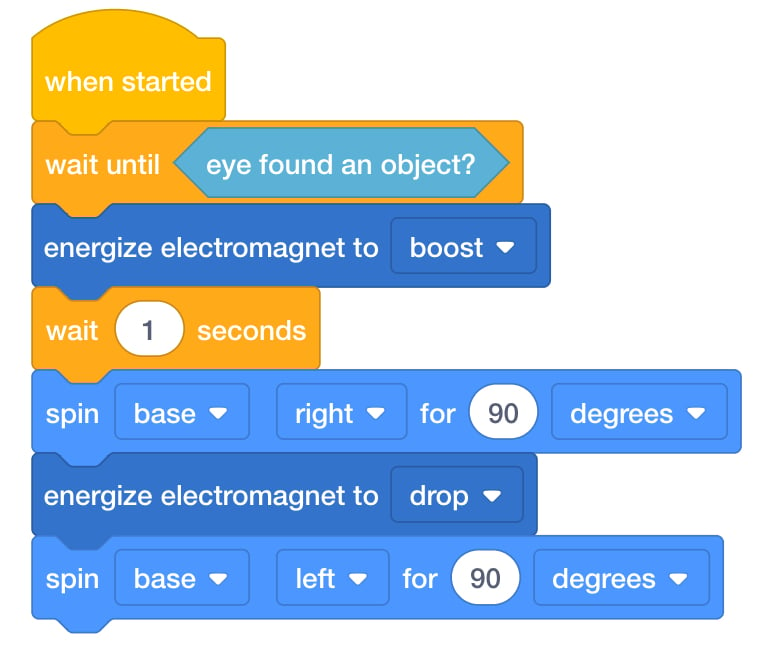
ল্যাব 4 পার্ট 1 সলিউশন একটি আলোচনা শুরু করার জন্য তাদের নিম্নলিখিত কিছু প্রশ্ন জিজ্ঞাসা করুন ।
- আপনার নিজের ভাষায়, বুলিয়ান শর্ত কী তা আপনি কীভাবে ব্যাখ্যা করবেন?
- আপনি কি মনে করেন যদি আমরা [অপেক্ষা করুন] ব্লকটি প্রকল্পের একটি ভিন্ন অংশে স্থানান্তরিত করি তবে কী হবে? প্রকল্পের প্রবাহ কীভাবে পরিবর্তিত হবে?
- আপনি যদি প্রকল্পের শেষে একটি দ্বিতীয় ডিস্ক সরাতে চান, তাহলে আপনার আর কোন ব্লক যোগ করতে হবে?
- ল্যাব ৩-এ আপনি যে প্রকল্প তৈরি করেছেন তার সাথে এই প্রকল্পটি কীভাবে একই রকম বা আলাদা?
- মনে করিয়ে দিনদলগুলি বিভ্রান্ত হলে প্রশ্ন জিজ্ঞাসা করতে মনে করিয়ে দিন। প্রতিটি প্রচেষ্টা সঠিকভাবে চলবে না । প্রতিবার যখন তারা প্রকল্পটি চালায়, তখন শিক্ষার্থীদের কী ভুল হয়েছে তা চিহ্নিত করা উচিত এবং কীভাবে এটি ঠিক করা যায় সে সম্পর্কে চিন্তাভাবনা করা উচিত । বিচার এবং ত্রুটি প্রত্যাশিত ।
শিক্ষার্থীরা যদি হতাশ হয় এবং আরও সহায়তার প্রয়োজন হয় তবে তাদের আপনার কাছে প্রকল্পের লক্ষ্যটি পুনরাবৃত্তি করতে বলুন ।
- শিক্ষার্থীদের জিজ্ঞাসা করুন যে তারা কোন ডিভাইসগুলি জানেন যা আই সেন্সর ব্যবহার করতে পারে? (ভ্যাকুয়াম রোবট, ইলেকট্রনিক ডোরবেল)
যদি তাদের কোনও তালিকা নিয়ে আসতে অসুবিধা হয়, তাহলে তাদের এমন ডিভাইসগুলির একটি তালিকা নিয়ে আসতে হবে যার জন্য তারা একটি আই সেন্সর চান ।
- উদাহরণ: আমি আমার পিছনের দরজায় একটি আই সেন্সর চাই যাতে প্রতিবার কুকুরটি বাইরে যেতে চায়, আই সেন্সর আমাদের বলবে যে কুকুরটি দরজায় ছিল ।
মিড-প্লে ব্রেক & গ্রুপ আলোচনা
যত তাড়াতাড়ি প্রতিটি গ্রুপ আই সেন্সর এবং [অপেক্ষা করুন] ব্লক ব্যবহার করে একটি প্রকল্প তৈরি করেছে, একটি সংক্ষিপ্ত কথোপকথনের জন্য একসাথে আসুন ।
[অপেক্ষা করুন] ব্লকের মাধ্যমে প্রকল্প প্রবাহ সম্পর্কে কথা বলা যাক ।
- প্রকল্পের শুরুতে [অপেক্ষা করুন] ব্লক রাখা কেন গুরুত্বপূর্ণ ছিল?
- [অপেক্ষা করুন] ব্লকটি অন্য জায়গায় থাকলে আমাদের প্রকল্পের প্রবাহের কী হবে?
- আমাদের রোবট আর্ম কি এখনও আমরা যেভাবে চেয়েছিলাম সেভাবে কাজ করবে?
 [অপেক্ষা করুন] ব্লকের
[অপেক্ষা করুন] ব্লকের
পার্ট 2 - ধাপে ধাপে
- শিক্ষার্থীদের নির্দেশ দিন যে তারা তাদের প্রকল্পে পুনরাবৃত্তি করতে যাচ্ছেন যাতে একটি ডিস্ক সনাক্ত না হওয়া পর্যন্ত রোবট আর্ম অপেক্ষা করতে পারে, ডিস্কটি উত্তোলন করতে পারে, ডিস্কটিকে টাইলের অন্য অংশে সরিয়ে নিতে পারে, ডিস্কটি ফেলে দিতে পারে এবং শুরুর অবস্থানে ফিরে আসতে পারে । প্রথমে ডিস্কটি সেন্সিং করে এবং তারপরে ইলেক্ট্রোম্যাগনেট ব্যবহার করে অন্য কোনও স্থানে সরানোর জন্য কীভাবে রোবট আর্ম সফলভাবে ডিস্কটি সরাতে পারে তা দেখতে নীচের ভিডিওটি দেখুন ।
ভিডিও ফাইল
- ARM মোটর নিয়ন্ত্রণ করতে [Spin for] ব্লক কীভাবে পরিবর্তন করবেন শিক্ষার্থীদের জন্য মডেল মডেল ।
-
শিক্ষার্থীদের তাদের ল্যাব 4 পার্ট 1 প্রকল্প খুলতে হবে এবং এটির নাম পরিবর্তন করতে হবে ল্যাব 4 পার্ট 2। শুরু করার আগে, নিশ্চিত করুন শিক্ষার্থীরা তাদের ডিভাইস তাদের রোবট আর্ম (2-অক্ষ) এর সাথে সংযুক্ত করেছে এবং রোবট আর্মটিকনফিগার করা হয়েছে।
 প্রকল্পের
প্রকল্পের নাম পরিবর্তন করুন - [Spin for] ব্লকটিকে ওয়ার্কস্পেসে টেনে আনুন। ‘বেস‘ থেকে ‘আর্ম‘ -এ কীভাবে পরিবর্তন করতে হয় তা মনে আছে কিনা তা শিক্ষার্থীদের জিজ্ঞাসা করুন ।
 কর্মক্ষেত্রে [Spin for]
কর্মক্ষেত্রে [Spin for] যোগ করুন - ল্যাব ৪ ইমেজ স্লাইডশোতে অ্যানিমেশনটি দেখুন এবং শিক্ষার্থীদের জিজ্ঞাসা করুন যে বাহুটি যেভাবে দেখানো হয়েছে সেভাবে সরানোর জন্য অতিরিক্ত [স্পিন ফর] ব্লক কোথায় প্রয়োজন।
- শিক্ষার্থীরা প্রক্রিয়াটির প্রতিটি ধাপ কী তা মনে করিয়ে দিতে মন্তব্য ব্লক ব্যবহার করতে পারে। ব্যাখ্যা করুন যে মন্তব্যগুলি কেবল কোডারের জন্য, রোবটের জন্য নয়; তাই তারা প্রকল্পের প্রবাহকে প্রভাবিত করবে না ।

[মন্তব্য] ব্লক - মডেল ওয়ার্কস্পেসে একটি মন্তব্য ব্লক টেনে আনছে এবং ব্লকের মধ্যে একটি পদক্ষেপ টাইপ করছে ।
- একটি ডিস্ক সনাক্ত না হওয়া পর্যন্ত অপেক্ষা করুন
- ডিস্কটি উত্তোলন করুন
- ডিস্কটিকে টাইলের অন্য অংশে সরান
- ডিস্কটি ফেলে দিন
- প্রারম্ভিক লোকেশনে ফিরে যান
- ব্যাখ্যা করুন যে মন্তব্যগুলি কেবল কোডারের জন্য, রোবটের জন্য নয়; তাই তারা প্রকল্পের প্রবাহকে প্রভাবিত করবে না ।
[মন্তব্য] ব্লক যোগ করা হয়েছে - শিক্ষার্থীদের ইলেক্ট্রোম্যাগনেটে একটি ডিস্ক রাখুন এবং প্রকল্পটি শুরু করুন এবং দেখুন তাদের রোবট আর্ম কীভাবে চলে । তাদের উচিত ইলেক্ট্রোম্যাগনেটের সাথে সংযুক্ত একটি ডিস্ক দিয়ে প্রকল্পটি শুরু করা। প্রয়োজনে, "VEXcode GOএ একটি প্রকল্প শুরু করুন" প্রবন্ধটি দেখুন এবং শিক্ষার্থীদের জন্য এই প্রবন্ধের ধাপগুলি মডেল করুন যাতে তারা একটি প্রকল্প শুরু করতে পারে।
-
- শিক্ষার্থীরা তাদের প্রকল্পগুলিতে পুনরাবৃত্তি শুরু করার সাথে সাথে প্রকল্প প্রবাহ সম্পর্কে কথোপকথন সহজতর করুন ।

আপনার রোবটের বাহু হওয়া উচিত... যেমন প্রশ্ন জিজ্ঞাসা করুন:
- আর্ম মোটর স্পুন হওয়ার পরে [অপেক্ষা করুন] ব্লক যোগ করা হলে কী হবে বলে আপনি মনে করেন? এটি আপনার প্রকল্পের প্রবাহকে কীভাবে পরিবর্তন করবে?
- আপনি কেন মনে করেন যে আমরা চাই যে রোবট আর্মটি ডিস্কটি ড্রপ অফ করার পরে প্রারম্ভিক অবস্থানে ফিরে যাক?
- আপনি কোডিং করার সময় মন্তব্য ব্লকগুলি কীভাবে আপনার প্রকল্পের প্রবাহ বুঝতে সাহায্য করতে পারে?
- আপনি যদি একটি নতুন স্থানে একটি দ্বিতীয় ডিস্ক স্থানান্তর করতে চান, তাহলে আপনার আর কোন ব্লক যোগ করতে হবে?
- মনে করিয়ে দিনদলগুলি বিভ্রান্ত হলে প্রশ্ন জিজ্ঞাসা করতে মনে করিয়ে দিন। প্রতিটি প্রচেষ্টা সঠিকভাবে চলবে না । প্রতিবার যখন তারা প্রকল্পটি চালায়, তখন শিক্ষার্থীদের কী ভুল হয়েছে তা চিহ্নিত করা উচিত এবং কীভাবে এটি ঠিক করা যায় সে সম্পর্কে চিন্তাভাবনা করা উচিত । বিচার এবং ত্রুটি প্রত্যাশিত ।
শিক্ষার্থীরা যদি হতাশ হয় এবং আরও সহায়তার প্রয়োজন হয় তবে তাদের আপনার কাছে প্রকল্পের লক্ষ্যটি পুনরাবৃত্তি করতে বলুন ।
তাদের গাইড হিসাবে তাদের ল্যাব 4 পার্ট 1 প্রকল্প ব্যবহার করা উচিত ।
শিক্ষক রেফারেন্সের জন্য ল্যাব 4 পার্ট 2 সলিউশনও পাওয়া যায় ।

ল্যাব 4 পার্ট 2 সলিউশন - শিক্ষার্থীদের জিজ্ঞাসা করুন আর্ম মোটর এবং বেস মোটর উভয় ব্যবহার করে তারা অন্যান্য কী কী কাজ সম্পন্ন করতে সক্ষম হতে পারে? একটি বড় রোবোটিক বাহুতে কী হবে?