
রোবট আর্ম প্রোগ্রামিং - পাইথন
![]() শিক্ষক টুলবক্স
-
কার্যকলাপের রূপরেখা
শিক্ষক টুলবক্স
-
কার্যকলাপের রূপরেখা
- এই অন্বেষণ শিক্ষার্থীদের V5 Clawbot এর আর্ম মোটরের মৌলিক প্রোগ্রামিংয়ের সাথে পরিচয় করিয়ে দেবে।
- আর্ম মোটর প্রোগ্রামিং শেখার মাধ্যমে শিক্ষার্থীরা V5 Clawbot-এর বাহুর নড়াচড়া সঠিকভাবে নিয়ন্ত্রণ করতে পারে। পাইথন প্রকল্পে ব্যবহৃত নির্দেশাবলী সম্পর্কে আরও তথ্যের জন্য, VEXcode V5 পাইথনের জন্য সহায়তা তথ্য দেখুন।
![]() শিক্ষক টিপস
-
স্বয়ংসম্পূর্ণ ব্যবহার
শিক্ষক টিপস
-
স্বয়ংসম্পূর্ণ ব্যবহার
VEXcode V5-এর একটি বৈশিষ্ট্য হল Autocomplete যা আপনার টাইপ করা বাকি কমান্ডের পূর্বাভাস দেয়। যেহেতু শিক্ষার্থীরা VEXcode V5 তে কাজ করছে, তাই তাদের Python সিনট্যাক্সে সাহায্য করার জন্য Autocomplete বৈশিষ্ট্যটি ব্যবহার করতে উৎসাহিত করুন। আপনি যখন নির্দেশনা টাইপ করা শুরু করবেন তখন একটি স্বয়ংক্রিয় সম্পূর্ণ ফাংশন লক্ষ্য করতে পারেন। আপনার পছন্দের নামটি নির্বাচন করতে "Up" এবং "Down" কী ব্যবহার করুন, তারপর নির্বাচন করতে আপনার কীবোর্ডে "Tab" অথবা (Enter/Return) টিপুন। এই বৈশিষ্ট্য সম্পর্কে আরও তথ্যের জন্য পাইথন নিবন্ধদেখুন। 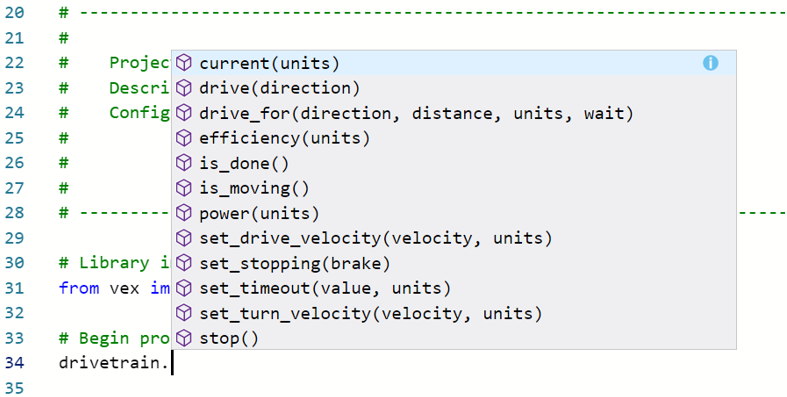
V5 Clawbot পৌঁছানোর জন্য প্রস্তুত!
এই অন্বেষণ আপনাকে V5 Clawbot এর বাহু ব্যবহার করে এমন কিছু দুর্দান্ত প্রকল্প তৈরি করতে সক্ষম হওয়ার জন্য সরঞ্জাম দেবে।
- VEXcode V5 Python নির্দেশাবলী যা এই অনুসন্ধানে ব্যবহার করা হবে:
- arm_motor.spin_for(FORWARD, 90, DEGREES)
- arm_motor.set_position(0, DEGREES)
- অপেক্ষা করুন (2, সেকেন্ড)
-
নির্দেশ সম্পর্কে আরও তথ্য জানতে, আরও তথ্য দেখতে একটি কমান্ডের পাশে প্রশ্ন চিহ্ন আইকন নির্বাচন করুন।

- আপনার প্রয়োজনীয় হার্ডওয়্যার, আপনার ইঞ্জিনিয়ারিং নোটবুক এবং VEXcode V5 ডাউনলোড করা এবং প্রস্তুত আছে তা নিশ্চিত করুন৷
| পরিমাণ | উপকরণ প্রয়োজন |
|---|---|
| 1 |
VEX V5 ক্লাসরুম স্টার্টার কিট (আপ টু ডেট ফার্মওয়্যার সহ) |
| 1 |
VEXcode V5 |
| 1 |
ইঞ্জিনিয়ারিং নোটবুক |
| 1 |
ক্লবট এবং অ্যাডভান্সড ট্রেনিংবট (ড্রাইভট্রেন ২-মোটর, গাইরো নেই) উদাহরণ প্রকল্প |
ধাপ 1: অনুসন্ধানের জন্য প্রস্তুতি
আপনি কার্যকলাপ শুরু করার আগে, আপনি এই আইটেম প্রতিটি প্রস্তুত আছে? নিম্নলিখিত প্রতিটি পরীক্ষা করুন:
-
মোটরগুলি কি সঠিক পোর্টগুলিতে প্লাগ করা হয়েছে?
-
স্মার্ট কেবলকি সমস্ত মোটরেসম্পূর্ণরূপে ঢোকানো আছে?
-
মস্তিষ্ককিচালু আছে?
![]() শিক্ষকদের টিপস
শিক্ষকদের টিপস
শিক্ষার্থীদের জন্য প্রতিটি সমস্যা সমাধানের ধাপ মডেল করুন।
ধাপ ২: একটি নতুন প্রকল্প শুরু করুন
আপনি আপনার প্রকল্প শুরু করার আগে, সঠিক টেমপ্লেট প্রকল্প নির্বাচন করুন. ক্লবট এবং অ্যাডভান্সড ট্রেনিংবট (ড্রাইভট্রেন ২-মোটর, নো গাইরো) উদাহরণ প্রকল্পটিতে ক্লবটের মোটর কনফিগারেশন রয়েছে। টেমপ্লেট ব্যবহার না করা হলে, আপনার রোবট সঠিকভাবে প্রকল্প চালাবে না।

নিম্নলিখিত পদক্ষেপগুলি সম্পূর্ণ করুন:
- ফাইল মেনু খুলুন।
- নির্বাচন করুনখুলুনউদাহরণ।
- Clawbot এবং Advanced TrainingBot (Drivetrain 2-motor, No Gyro) উদাহরণ প্রকল্পটি নির্বাচন করুন এবং খুলুন।
- যেহেতু আমরা আর্ম নিয়ন্ত্রণের জন্য প্রোগ্রামিং করব, তাই আপনার প্রোজেক্টের নাম পরিবর্তন করুনArmControl।
- আপনার প্রকল্পসংরক্ষণ করুন।
- প্রকল্পের নাম ArmControl এখন টুলবারের কেন্দ্রে উইন্ডোতে আছে তা নিশ্চিত করতে পরীক্ষা করুন।

![]() শিক্ষকদের টিপস
শিক্ষকদের টিপস
- যেহেতু এটি প্রোগ্রামিং সহ একটি প্রাথমিক কার্যকলাপ, তাই শিক্ষকের পদক্ষেপগুলি মডেল করা উচিত এবং তারপরে শিক্ষার্থীদের একই কার্যকলাপগুলি সম্পন্ন করতে বলা উচিত। এরপর শিক্ষকের উচিত শিক্ষার্থীদের উপর নজর রাখা যাতে তারা সঠিকভাবে পদক্ষেপগুলি অনুসরণ করছে কিনা তা নিশ্চিত করা যায়।
- নিশ্চিত করুন যে শিক্ষার্থীরা ফাইল মেনু থেকে "Open Examples" নির্বাচন করেছে।
- নিশ্চিত করুন যে শিক্ষার্থীরা Clawbot এবং Advanced TrainingBot (Drivetrain 2-motor, No Gyro) উদাহরণ প্রকল্পটি নির্বাচন করেছে।
তুমি শিক্ষার্থীদের বলতে পারো যে উদাহরণ পৃষ্ঠা থেকে বেছে নেওয়ার জন্য বেশ কয়েকটি নির্বাচন রয়েছে। তারা যখন অন্যান্য রোবট তৈরি এবং ব্যবহার করবে, তখন তারা বিভিন্ন টেমপ্লেট ব্যবহার করার সুযোগ পাবে।
- আপনি শিক্ষার্থীদের প্রকল্পের নামের সাথে তাদের নামের আদ্যক্ষর অথবা তাদের দলের নাম যোগ করতে বলতে পারেন। আপনি যদি শিক্ষার্থীদের প্রকল্পগুলি জমা দিতে বলেন, তাহলে এটি প্রকল্পগুলিকে আলাদা করতে সাহায্য করবে।
![]() শিক্ষক টুলবক্স
-
সংরক্ষণ প্রকল্প
শিক্ষক টুলবক্স
-
সংরক্ষণ প্রকল্প
- উল্লেখ করুন যে যখন তারা প্রথম VEXcode V5 খোলে, তখন উইন্ডোটির নাম ছিল VEXcode Project। VEXcode V5 প্রথম খোলার সময় VEXcode Project হল ডিফল্ট প্রোজেক্টের নাম। একবার প্রকল্পটির নাম পরিবর্তন করে সংরক্ষণ করা হলে, নতুন প্রকল্পের নাম দেখানোর জন্য ডিসপ্লেটি আপডেট করা হয়েছিল। টুলবারের এই উইন্ডোটি ব্যবহার করে, শিক্ষার্থীরা সঠিক প্রকল্পটি ব্যবহার করছে কিনা তা পরীক্ষা করা সহজ।
- শিক্ষার্থীদের বলুন যে তারা এখন তাদের প্রথম প্রকল্প শুরু করার জন্য প্রস্তুত। শিক্ষার্থীদের বুঝিয়ে বলুন যে কয়েকটি সহজ ধাপ অনুসরণ করে, তারা এমন একটি প্রকল্প তৈরি এবং চালাতে সক্ষম হবে যা ক্লবটের বাহু উঁচু এবং নিচু করবে।
- শিক্ষার্থীদের মনে করিয়ে দিন যে তারা কাজ করার সময় তাদের প্রকল্পগুলি সংরক্ষণ করে রাখে। VEX লাইব্রেরি এর পাইথন বিভাগের নিবন্ধগুলিতে VEXcode V5-এ সংরক্ষণের অনুশীলনগুলি ব্যাখ্যা করা হয়েছে।
![]() শিক্ষক টুলবক্স
-
থামুন এবং আলোচনা করুন
শিক্ষক টুলবক্স
-
থামুন এবং আলোচনা করুন
VEXcode V5-এ একটি নতুন প্রকল্প শুরু করার জন্য ছাত্র দলগুলিকে যে পদক্ষেপগুলি সম্পন্ন করা হয়েছে তা পর্যালোচনা করার জন্য এটি একটি ভাল বিষয়।
ধাপ ৩: বাহু উপরে নামান
আমরা এখন বাহু বাড়াতে প্রোগ্রামিং শুরু করতে যাচ্ছি!
# লাইব্রেরি vex আমদানি থেকে
আমদানি করে *
# শুরু প্রকল্প কোড
arm_motor.set_position(0, DEGREES)- বাহুর শুরুর অবস্থান নির্ধারণ করতে প্রোগ্রামিং এরিয়ায় উপরে দেখানো arm_motor.set_position()কমান্ডটি লিখুন।
arm_motor.set_position(0, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)- বাহুটি উপরে সরানোর জন্য উপরে দেখানো arm_motor.set_position() কমান্ডের নিচে arm_motor.spin_for()কমান্ড যোগ করুন।

- স্লট আইকন নির্বাচন করুন। আপনি রোবট ব্রেইনের উপলব্ধ স্লটে আপনার প্রকল্পটি ডাউনলোড করতে পারেন। স্লট 1 নির্বাচন করুন।
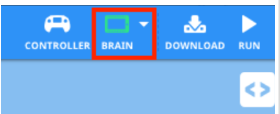
- আপনার কম্পিউটার বা ট্যাবলেটে রোবটটি সংযুক্ত করুন। সফল সংযোগ তৈরি হওয়ার পর টুলবারএর ব্রেন আইকনটি সবুজপরিণত হয়।

- রোবট ব্রেনে আর্মকন্ট্রোল প্রকল্পটি ডাউনলোড করতে টুলবারেরডাউনলোডবোতামে ক্লিক করুন।
![]() শিক্ষক টুলবক্স
শিক্ষক টুলবক্স
যদি শিক্ষার্থীরা কম্পিউটার ব্যবহার করে, তাহলে এখনই তাদের রোবট ব্রেন থেকে USB কেবলটি সংযোগ বিচ্ছিন্ন করতে বলুন। কোনও প্রকল্প চালানোর সময় রোবটটিকে কম্পিউটারের সাথে সংযুক্ত রাখার ফলে রোবটটি সংযোগ কেবলটি টেনে ধরতে পারে।

- আপনার বেছে নেওয়া স্লটে আর্মকন্ট্রোল প্রকল্পটি মস্তিষ্কে ডাউনলোড হয়েছে কিনা তা পরীক্ষা করুন।
![]() শিক্ষক টুলবক্স
-
মডেল ফার্স্ট
শিক্ষক টুলবক্স
-
মডেল ফার্স্ট
সকল শিক্ষার্থীকে একসাথে চেষ্টা করার আগে ক্লাসের সামনে প্রকল্পটি চালানোর মডেল তৈরি করুন। শিক্ষার্থীদের একটি জায়গায় জড়ো করুন এবং ক্লবটকে তার হাত নাড়ানোর জন্য পর্যাপ্ত জায়গা ছেড়ে দিন। কীভাবে প্রকল্পটি শেষ করতে হয় এবং ক্লবটের হাতটি তার বিশ্রামের অবস্থানে ফিরিয়ে আনতে হয় তা দেখান।
শিক্ষার্থীদের বলুন এখন তাদের প্রকল্প পরিচালনার পালা। নিশ্চিত করুন যে ক্লবটের হাত নিরাপদে উঁচু করার জন্য তাদের পর্যাপ্ত জায়গা আছে।
- Clawbot-এ প্রকল্পটি রান করুন, নিশ্চিত করুন যে প্রকল্পটি নির্বাচিত হয়েছে এবং তারপর Run বোতাম টিপুন। আপনার প্রথম ক্ল আর্ম প্রকল্প তৈরি করার জন্য অভিনন্দন!
ধাপ ৪: এটি চেষ্টা করুন: বাহু নিচে প্রোগ্রাম করুন
এখন আপনি বাহুটিকে উপরের দিকে নিয়ে যাওয়ার জন্য প্রোগ্রাম করেছেন, আপনি এখন বাহুটিকে নীচে বা নীচে সরানোর জন্য প্রোগ্রাম করবেন।
![]()
- আপনার ArmControl প্রজেক্টে দ্বিতীয় arm_motor.spin_for()কমান্ড যোগ করুন যাতে বাহুটি 90 ডিগ্রিতে উঠে, 2 সেকেন্ড অপেক্ষা করে, এবং তারপর আবার নিচে নেমে যায়।
- ইঙ্গিত:আপনাকে কমান্ডের মধ্যে দিক পরিবর্তন করতে হবে।
- লক্ষ্য করুন যেwaitকমান্ডটি চলাকালীন বাহুটি তার অবস্থান ধরে রেখেছে। মাধ্যাকর্ষণ শক্তির বিরুদ্ধে বাহু ধরে রাখার জন্য মোটর ব্যাটারি থেকে শক্তি টেনে নেয়। কারণ মোটর থামানোর জন্য ডিফল্ট সেটিং হলহোল্ডসেটিং। থামার জন্য আরও দুটি সেটিংস আছে -ব্রেকএবংকোস্ট। আপনি অন্য ল্যাবে সেগুলি সম্পর্কে শিখবেন।
![]() শিক্ষক টুলবক্স
-
সমাধান
শিক্ষক টুলবক্স
-
সমাধান
চ্যালেঞ্জের সমাধান নিচে দেওয়া হল। বাহু নিচু করার জন্য, শিক্ষার্থীদের arm_motor.spin_for()কমান্ড যোগ করার সময় "FORWARD" প্যারামিটারটি "REVERSE" তে পরিবর্তন করতে হয়েছিল।
# প্রকল্প কোড শুরু করুন
arm_motor.set_position(0, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
wait(2, SECONDS)
arm_motor.spin_for(REVERSE, 90, DEGREES)ধাপ ৫: ফ্লাইট ট্র্যাফিক কন্ট্রোলার চ্যালেঞ্জ সম্পূর্ণ করুন
![]() ফ্লাইট ট্রাফিক কন্ট্রোলার চ্যালেঞ্জে, ক্লোবটকে অবশ্যই তার হাতটি 90 ডিগ্রির জন্য একবার উপরে এবং নীচে সরাতে হবে, 3 সেকেন্ড অপেক্ষা করতে হবে, 45 ডিগ্রির জন্য বাহুটিকে দুইবার উপরে এবং নীচে সরাতে হবে, 5 সেকেন্ড অপেক্ষা করতে হবে এবং তারপরে হাতটিকে উপরে এবং নীচে নিয়ে যেতে হবে। 90 ডিগ্রী জন্য বার.
ফ্লাইট ট্রাফিক কন্ট্রোলার চ্যালেঞ্জে, ক্লোবটকে অবশ্যই তার হাতটি 90 ডিগ্রির জন্য একবার উপরে এবং নীচে সরাতে হবে, 3 সেকেন্ড অপেক্ষা করতে হবে, 45 ডিগ্রির জন্য বাহুটিকে দুইবার উপরে এবং নীচে সরাতে হবে, 5 সেকেন্ড অপেক্ষা করতে হবে এবং তারপরে হাতটিকে উপরে এবং নীচে নিয়ে যেতে হবে। 90 ডিগ্রী জন্য বার.
এখানে Clawbot এর আচরণের একটি তালিকা আছে:
- 90 ডিগ্রির জন্য হাত উপরে এবং তারপর নিচে সরান।
- 3 সেকেন্ড অপেক্ষা করুন।
- 45 ডিগ্রির জন্য বাহু উপরে এবং তারপর নিচে সরান।
- 45 ডিগ্রির জন্য বাহু উপরে এবং তারপর নিচে সরান।
- 5 সেকেন্ড অপেক্ষা করুন।
- 90 ডিগ্রির জন্য হাত উপরে এবং তারপর নিচে সরান।
- 90 ডিগ্রির জন্য হাত উপরে এবং তারপর নিচে সরান।
- 90 ডিগ্রির জন্য হাত উপরে এবং তারপর নিচে সরান।
![]() শিক্ষক টুলবক্স
-
সমাধান
শিক্ষক টুলবক্স
-
সমাধান
এই চ্যালেঞ্জের মধ্যে বেশিরভাগ কমান্ড হল arm_motor.spin_for()। বাহু উপরের দিকে সরানোর জন্য একটি এবং বাহু নীচের দিকে সরানোর জন্য একটি কমান্ড যোগ করার পরে, আপনি দুটি কমান্ড হাইলাইট করতে পারেন, ডান-ক্লিক করতে পারেন, এবং তারপর যতবার প্রয়োজন ততবার কপি এবং পেস্ট করতে পারেন। তারপর চ্যালেঞ্জ পূরণের জন্য প্যারামিটারগুলি পরিবর্তন করা যেতে পারে এবং এর মধ্যে waitকমান্ড যোগ করা যেতে পারে।
- ফ্লাইট ট্র্যাফিক কন্ট্রোলার চ্যালেঞ্জ সমাধানের একটি উদাহরণ এখানে পর্যালোচনা করুন:
# প্রকল্প কোড শুরু করুন
arm_motor.set_position(0, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)
wait(3, SECONDS)
arm_motor.spin_for(FORWARD, 45, DEGREES)
arm_motor.spin_for(REVERSE, 45, DEGREES)
arm_motor.spin_for(FORWARD, 45, DEGREES)
arm_motor.spin_for(REVERSE, 45, DEGREES)
wait(5, SECONDS)
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)আরও উন্নত শিক্ষার্থীরা সমাধানটি সহজ করার জন্য লুপ ব্যবহার করতে পারে।
# প্রকল্প কোড শুরু করুন
arm_motor.set_position(0, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)
wait(3, SECONDS)
repeat_count in range(2):
arm_motor.spin_for(FORWARD, 45, DEGREES)
arm_motor.spin_for(REVERSE, 45, DEGREES)
wait(5, SECONDS)
repeat_count in range(3):
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)