
റോബോട്ട് ആം പ്രോഗ്രാമിംഗ് - പൈത്തൺ
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പ്രവർത്തന രൂപരേഖ
ടീച്ചർ ടൂൾബോക്സ്
-
പ്രവർത്തന രൂപരേഖ
- ഈ പര്യവേഷണം വിദ്യാർത്ഥികളെ V5 ക്ലോബോട്ടിന്റെ ആം മോട്ടോറിന്റെ അടിസ്ഥാന പ്രോഗ്രാമിംഗിലേക്ക് പരിചയപ്പെടുത്തും.
- ആം മോട്ടോർ പ്രോഗ്രാം ചെയ്യാൻ പഠിക്കുന്നത് വിദ്യാർത്ഥികളെ V5 ക്ലോബോട്ടിന്റെ കൈ ചലനങ്ങൾ ശരിയായി നിയന്ത്രിക്കാൻ പ്രാപ്തരാക്കുന്നു. ഒരു പൈത്തൺ പ്രോജക്റ്റിൽ ഉപയോഗിക്കുന്ന നിർദ്ദേശങ്ങളെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, VEXcode V5 പൈത്തണിനായുള്ള സഹായ വിവരങ്ങൾ സന്ദർശിക്കുക.
![]() അധ്യാപക നുറുങ്ങുകൾ
-
ഓട്ടോകംപ്ലീറ്റ് ഉപയോഗിക്കൽ
അധ്യാപക നുറുങ്ങുകൾ
-
ഓട്ടോകംപ്ലീറ്റ് ഉപയോഗിക്കൽ
നിങ്ങൾ ടൈപ്പ് ചെയ്യുന്ന കമാൻഡിന്റെ ബാക്കി ഭാഗങ്ങൾ പ്രവചിക്കുന്ന VEXcode V5 ലെ ഒരു സവിശേഷതയാണ് ഓട്ടോകംപ്ലീറ്റ്. വിദ്യാർത്ഥികൾ VEXcode V5-ൽ പ്രവർത്തിക്കുന്നതിനാൽ, പൈത്തൺ വാക്യഘടനയിൽ സഹായിക്കുന്നതിന് ഓട്ടോകംപ്ലീറ്റ് സവിശേഷത ഉപയോഗിക്കാൻ അവരെ പ്രോത്സാഹിപ്പിക്കുക. നിങ്ങൾ നിർദ്ദേശം ടൈപ്പ് ചെയ്യാൻ തുടങ്ങുമ്പോൾ ഒരു ഓട്ടോകംപ്ലീറ്റ് ഫംഗ്ഷൻ നിങ്ങൾ ശ്രദ്ധിച്ചേക്കാം. നിങ്ങൾക്ക് ആവശ്യമുള്ള പേര് തിരഞ്ഞെടുക്കാൻ നിങ്ങളുടെ “Up” ഉം “Down” ഉം കീകൾ ഉപയോഗിക്കുക, തുടർന്ന് തിരഞ്ഞെടുക്കാൻ നിങ്ങളുടെ കീബോർഡിൽ “Tab” അല്ലെങ്കിൽ (Enter/Return) അമർത്തുക. ഈ സവിശേഷതയെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക് പൈത്തൺ ലേഖനംപരിശോധിക്കുക. 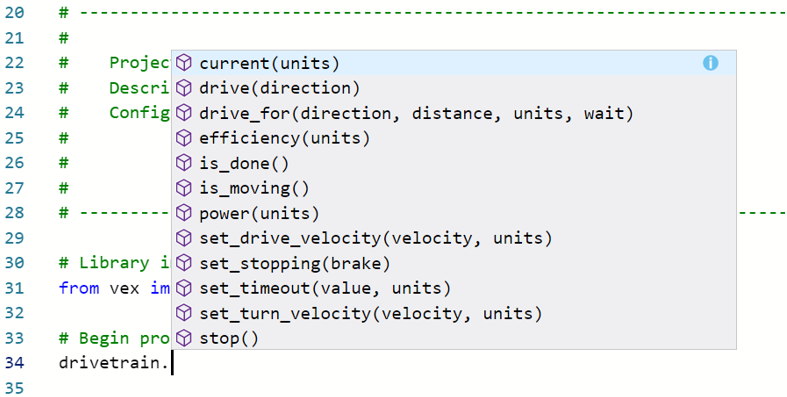
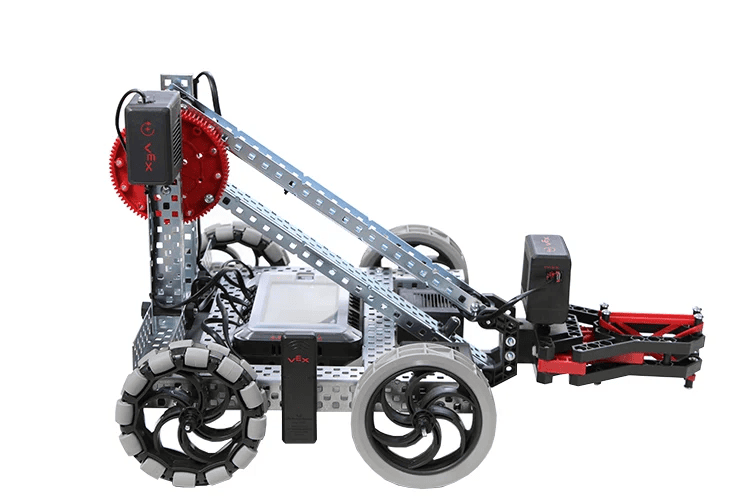
V5 Clawbot എത്താൻ തയ്യാറാണ്!
V5 ക്ലോബോട്ടിന്റെ കൈ ഉപയോഗിച്ച് ചില രസകരമായ പ്രോജക്ടുകൾ സൃഷ്ടിക്കാൻ തുടങ്ങുന്നതിനുള്ള ഉപകരണങ്ങൾ ഈ പര്യവേക്ഷണം നിങ്ങൾക്ക് നൽകും.
- ഈ പര്യവേഷണത്തിൽ ഉപയോഗിക്കുന്ന VEXcode V5 പൈത്തൺ നിർദ്ദേശങ്ങൾ:
- arm_motor.spin_for(മുന്നോട്ട്, 90, ഡിഗ്രി)
- ആം_മോട്ടോർ.സെറ്റ്_പൊസിഷൻ(0, ഡിഗ്രികൾ)
- കാത്തിരിക്കുക (2, സെക്കൻഡ്)
-
നിർദ്ദേശത്തെക്കുറിച്ച് കൂടുതൽ വിവരങ്ങൾ കണ്ടെത്താൻ, കൂടുതൽ വിവരങ്ങൾ കാണുന്നതിന് ഒരു കമാൻഡിന് അടുത്തുള്ള ചോദ്യചിഹ്ന ഐക്കൺ തിരഞ്ഞെടുക്കുക.

- ആവശ്യമായ ഹാർഡ്വെയർ, എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്ക്, VEXcode V5 എന്നിവ ഡൗൺലോഡ് ചെയ്ത് തയ്യാറായിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
| അളവ് | ആവശ്യമായ വസ്തുക്കൾ |
|---|---|
| 1 |
VEX V5 ക്ലാസ്റൂം സ്റ്റാർട്ടർ കിറ്റ് (കാലികമായ ഫേംവെയറോടുകൂടി) |
| 1 |
VEXcode V5 |
| 1 |
എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്ക് |
| 1 |
ക്ലോബോട്ട്, അഡ്വാൻസ്ഡ് ട്രെയിനിംഗ് ബോട്ട് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോർ, ഗൈറോ ഇല്ല) ഉദാഹരണ പ്രോജക്റ്റ് |
ഘട്ടം 1: പര്യവേക്ഷണത്തിനുള്ള തയ്യാറെടുപ്പ്
പ്രവർത്തനം ആരംഭിക്കുന്നതിന് മുമ്പ്, ഈ ഇനങ്ങൾ ഓരോന്നും നിങ്ങളുടെ കൈവശം തയ്യാറായിട്ടുണ്ടോ? ഇനിപ്പറയുന്നവയിൽ ഓരോന്നും പരിശോധിക്കുക:
-
മോട്ടോറുകൾ ശരിയായ പോർട്ടുകളിൽ പ്ലഗ് ചെയ്തിട്ടുണ്ടോ?
-
എല്ലാ മോട്ടോറുകളിലും സ്മാർട്ട് കേബിളുകൾപൂർണ്ണമായുംചേർത്തിട്ടുണ്ടോ?
-
ബാറ്ററിചാർജ്ജ്ആണോ?
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
വിദ്യാർത്ഥികൾക്കായി ഓരോ പ്രശ്നപരിഹാര ഘട്ടങ്ങളും മാതൃകയാക്കുക.
ഘട്ടം 2: ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിക്കുക
നിങ്ങളുടെ പ്രോജക്റ്റ് ആരംഭിക്കുന്നതിന് മുമ്പ്, ശരിയായ ടെംപ്ലേറ്റ് പ്രോജക്റ്റ് തിരഞ്ഞെടുക്കുക. ക്ലോബോട്ട്, അഡ്വാൻസ്ഡ് ട്രെയിനിംഗ് ബോട്ട് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോർ, നോ ഗൈറോ) ഉദാഹരണ പ്രോജക്റ്റിൽ ക്ലോബോട്ടിന്റെ മോട്ടോറുകളുടെ കോൺഫിഗറേഷൻ അടങ്ങിയിരിക്കുന്നു. ടെംപ്ലേറ്റ് ഉപയോഗിക്കുന്നില്ലെങ്കിൽ, നിങ്ങളുടെ റോബോട്ട് പ്രോജക്റ്റ് ശരിയായി പ്രവർത്തിപ്പിക്കില്ല.

ഇനിപ്പറയുന്ന ഘട്ടങ്ങൾ പൂർത്തിയാക്കുക:
- ഫയൽ മെനു തുറക്കുക.
- തിരഞ്ഞെടുക്കുകതുറക്കുകഉദാഹരണങ്ങൾ.
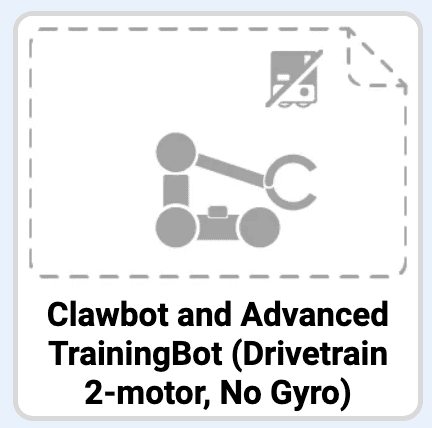
- Clawbot ഉം Advanced TrainingBot ഉം (Drivetrain 2-motor, No Gyro) ഉദാഹരണ പ്രോജക്റ്റ് തിരഞ്ഞെടുത്ത് തുറക്കുക.
- നമ്മൾ ആം നിയന്ത്രിക്കാൻ പ്രോഗ്രാം ചെയ്യുന്നതിനാൽ, നിങ്ങളുടെ പ്രോജക്റ്റ്ആംകൺട്രോൾഎന്ന് പുനർനാമകരണം ചെയ്യുക.
- നിങ്ങളുടെ പ്രോജക്റ്റ്സംരക്ഷിക്കുക.
- ടൂൾബാറിന്റെ മധ്യഭാഗത്തുള്ള വിൻഡോയിൽ ഇപ്പോൾ ArmControl എന്ന പ്രോജക്റ്റ് നാമം ഉണ്ടെന്ന് ഉറപ്പാക്കുക.

![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
- ഇത് പ്രോഗ്രാമിംഗോടുകൂടിയ ഒരു ആരംഭ പ്രവർത്തനമായതിനാൽ, അധ്യാപകൻ ഘട്ടങ്ങൾ മാതൃകയാക്കണം, തുടർന്ന് അതേ പ്രവർത്തനങ്ങൾ പൂർത്തിയാക്കാൻ വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെടണം. തുടർന്ന് അധ്യാപകൻ വിദ്യാർത്ഥികൾ ഘട്ടങ്ങൾ ശരിയായി പാലിക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കാൻ അവരെ നിരീക്ഷിക്കണം.
- ഫയൽ മെനുവിൽ നിന്ന് വിദ്യാർത്ഥികൾ 'ഓപ്പൺ ഉദാഹരണങ്ങൾ' തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
- വിദ്യാർത്ഥികൾ Clawbot ഉം Advanced TrainingBot ഉം (Drivetrain 2-motor, No Gyro) ഉദാഹരണ പ്രോജക്റ്റ് തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
ഉദാഹരണങ്ങൾ പേജിൽ നിന്ന് തിരഞ്ഞെടുക്കാൻ നിരവധി തിരഞ്ഞെടുപ്പുകൾ ഉണ്ടെന്ന് നിങ്ങൾക്ക് വിദ്യാർത്ഥികളെ ചൂണ്ടിക്കാണിക്കാം. അവർ മറ്റ് റോബോട്ടുകൾ നിർമ്മിക്കുകയും ഉപയോഗിക്കുകയും ചെയ്യുമ്പോൾ, അവർക്ക് വ്യത്യസ്ത ടെംപ്ലേറ്റുകൾ ഉപയോഗിക്കാനുള്ള അവസരം ലഭിക്കും.
- പ്രോജക്റ്റ് നാമത്തിൽ വിദ്യാർത്ഥികളോട് അവരുടെ ഇനീഷ്യലുകളോ ഗ്രൂപ്പിന്റെ പേരോ ചേർക്കാൻ ആവശ്യപ്പെടാം. വിദ്യാർത്ഥികളോട് പ്രോജക്ടുകൾ സമർപ്പിക്കാൻ ആവശ്യപ്പെടുകയാണെങ്കിൽ, അവ വ്യത്യസ്തമാക്കാൻ ഇത് സഹായിക്കും.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
സേവിംഗ് പ്രോജക്റ്റുകൾ
ടീച്ചർ ടൂൾബോക്സ്
-
സേവിംഗ് പ്രോജക്റ്റുകൾ
- അവർ ആദ്യമായി VEXcode V5 തുറന്നപ്പോൾ, വിൻഡോയിൽ VEXcode Project എന്ന് ലേബൽ ചെയ്തിരുന്നുവെന്ന് ചൂണ്ടിക്കാണിക്കുക. VEXcode V5 ആദ്യമായി തുറക്കുമ്പോൾ, VEXcode Project എന്നത് ഡിഫോൾട്ട് പ്രോജക്റ്റ് നാമമാണ്. പ്രോജക്റ്റ് പുനർനാമകരണം ചെയ്ത് സേവ് ചെയ്തുകഴിഞ്ഞാൽ, പുതിയ പ്രോജക്റ്റ് പേര് കാണിക്കുന്നതിനായി ഡിസ്പ്ലേ അപ്ഡേറ്റ് ചെയ്തു. ടൂൾബാറിലെ ഈ വിൻഡോ ഉപയോഗിച്ച്, വിദ്യാർത്ഥികൾ ശരിയായ പ്രോജക്റ്റ് ഉപയോഗിക്കുന്നുണ്ടോ എന്ന് പരിശോധിക്കാൻ എളുപ്പമാണ്.
- വിദ്യാർത്ഥികളോട് അവരുടെ ആദ്യ പ്രോജക്റ്റ് ആരംഭിക്കാൻ തയ്യാറാണെന്ന് പറയുക. കുറച്ച് ലളിതമായ ഘട്ടങ്ങൾ പാലിച്ചുകൊണ്ട്, ക്ലോബോട്ടിന്റെ കൈ ഉയർത്താനും താഴ്ത്താനും കഴിയുന്ന ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കാനും പ്രവർത്തിപ്പിക്കാനും അവർക്ക് കഴിയുമെന്ന് വിദ്യാർത്ഥികളോട് വിശദീകരിക്കുക.
- വിദ്യാർത്ഥികളെ അവരുടെ പ്രോജക്ടുകൾ പ്രവർത്തിക്കുമ്പോൾ അവ സംരക്ഷിക്കാൻ ഓർമ്മിപ്പിക്കുക. VEX ലൈബ്രറി ലെ പൈത്തൺ വിഭാഗത്തിലെ ലേഖനങ്ങൾ VEXcode V5 ലെ സേവിംഗ് രീതികൾ വിശദീകരിക്കുന്നു.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
VEXcode V5-ൽ ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിക്കുന്നതിനുള്ള ഘട്ടങ്ങൾ വിദ്യാർത്ഥി ഗ്രൂപ്പുകളുമായി അവലോകനം ചെയ്യാൻ ഇത് ഒരു നല്ല പോയിന്റാണ്.
ഘട്ടം 3: കൈ മുകളിലേക്ക് നീക്കുക
ഇനി നമ്മൾ ഉയർത്തേണ്ട കൈ പ്രോഗ്രാം ചെയ്തുകൊണ്ട് ആരംഭിക്കാൻ പോകുന്നു!
# ലൈബ്രറി vex import ൽ നിന്ന്
ഇമ്പോർട്ടുചെയ്യുന്നു *
# പ്രോജക്റ്റ് കോഡ്
arm_motor.set_position(0, DEGREES) ആരംഭിക്കുക- ആം ആരംഭ സ്ഥാനം സജ്ജമാക്കുന്നതിന് പ്രോഗ്രാമിംഗ് ഏരിയയിൽ മുകളിൽ കാണിച്ചിരിക്കുന്നതുപോലെ arm_motor.set_position()കമാൻഡ് എഴുതുക.
arm_motor.set_position(0, ഡിഗ്രികൾ)
arm_motor.spin_for(മുന്നോട്ട്, 90, ഡിഗ്രികൾ)- മുകളിൽ കാണിച്ചിരിക്കുന്നതുപോലെ, കൈ മുകളിലേക്ക് നീക്കാൻ arm_motor.set_position() കമാൻഡിന് താഴെ arm_motor.spin_for()കമാൻഡ് ചേർക്കുക.

- സ്ലോട്ട് ഐക്കൺ തിരഞ്ഞെടുക്കുക. റോബോട്ട് ബ്രെയിനിലെ ലഭ്യമായ സ്ലോട്ടുകളിലൊന്നിലേക്ക് നിങ്ങളുടെ പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്യാം. സ്ലോട്ട് 1 തിരഞ്ഞെടുക്കുക.
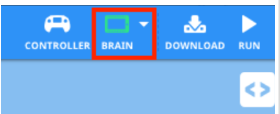
- റോബോട്ട് നിങ്ങളുടെ കമ്പ്യൂട്ടറിലേക്കോ ടാബ്ലെറ്റിലേക്കോ ബന്ധിപ്പിക്കുക. കണക്ഷൻ വിജയകരമായി പൂർത്തിയായാൽ ടൂൾബാറിലെ ബ്രെയിൻ ഐക്കൺപച്ചആയി മാറുന്നു.

- റോബോട്ട് ബ്രെയിനിലേക്ക് ആംകൺട്രോൾ പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്യാൻ ടൂൾബാറിലെഡൗൺലോഡ്ബട്ടൺ ക്ലിക്ക് ചെയ്യുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
ടീച്ചർ ടൂൾബോക്സ്
വിദ്യാർത്ഥികൾ കമ്പ്യൂട്ടർ ഉപയോഗിക്കുകയാണെങ്കിൽ, റോബോട്ട് ബ്രെയിനിൽ നിന്ന് യുഎസ്ബി കേബിൾ വിച്ഛേദിക്കാൻ അവരോട് ഇപ്പോൾ ആവശ്യപ്പെടുക. ഒരു പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുമ്പോൾ റോബോട്ട് ഒരു കമ്പ്യൂട്ടറുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നത് റോബോട്ട് കണക്ഷൻ കേബിളിൽ വലിക്കാൻ ഇടയാക്കും.

- നിങ്ങൾ തിരഞ്ഞെടുത്ത സ്ലോട്ടിലെ തലച്ചോറിലേക്ക് ആംകൺട്രോൾ പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്തിട്ടുണ്ടോയെന്ന് പരിശോധിക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
മോഡൽ ആദ്യം
ടീച്ചർ ടൂൾബോക്സ്
-
മോഡൽ ആദ്യം
എല്ലാ വിദ്യാർത്ഥികളെയും ഒരുമിച്ച് പരീക്ഷിക്കുന്നതിന് മുമ്പ്, ക്ലാസ്സിന് മുന്നിൽ പ്രോജക്റ്റ് മാതൃകയായി നടപ്പിലാക്കുക. വിദ്യാർത്ഥികളെ ഒരു സ്ഥലത്ത് ഒരുമിച്ചുകൂട്ടി ക്ലോബോട്ടിന് കൈ ചലിപ്പിക്കാൻ മതിയായ ഇടം നൽകുക. പ്രോജക്റ്റ് എങ്ങനെ അവസാനിപ്പിക്കാമെന്നും ക്ലോബോട്ടിന്റെ കൈ പിന്നിലേക്ക് താഴ്ത്തി വിശ്രമിക്കുന്ന സ്ഥാനത്തേക്ക് എങ്ങനെ കൊണ്ടുവരാമെന്നും പ്രദർശിപ്പിക്കുക.
വിദ്യാർത്ഥികളോട് പറയുക, ഇനി അവരുടെ പ്രോജക്ടുകൾ നടത്താനുള്ള ഊഴമാണ്. ക്ലോബോട്ടിന്റെ കൈ സുരക്ഷിതമായി ഉയർത്താൻ അവർക്ക് മതിയായ ഇടമുണ്ടെന്ന് ഉറപ്പാക്കുക.
- പ്രോജക്റ്റ് തിരഞ്ഞെടുത്തുവെന്ന് ഉറപ്പാക്കി Clawbot-ൽ പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക, തുടർന്ന് Run ബട്ടൺ അമർത്തുക. നിങ്ങളുടെ ആദ്യത്തെ ക്ലോ ആം പ്രോജക്റ്റ് സൃഷ്ടിച്ചതിന് അഭിനന്ദനങ്ങൾ!
ഘട്ടം 4: ഇത് പരീക്ഷിച്ചുനോക്കൂ: കൈ താഴേക്ക് പ്രോഗ്രാം ചെയ്യുക
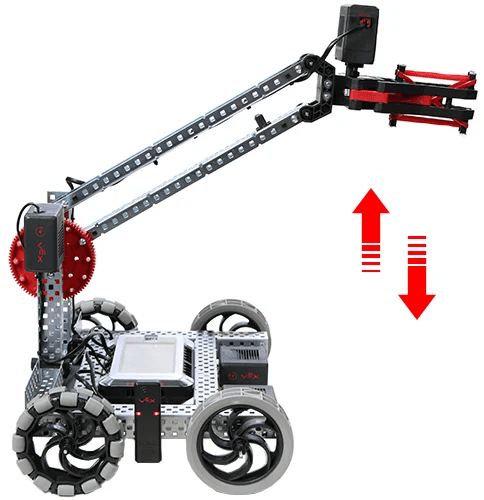
ഇപ്പോൾ നിങ്ങൾ ഭുജം മുകളിലേക്ക് നീക്കാൻ പ്രോഗ്രാം ചെയ്തുകഴിഞ്ഞാൽ, ഇനി നിങ്ങൾ ഭുജം താഴ്ത്താനോ താഴേക്കോ നീക്കാൻ പ്രോഗ്രാം ചെയ്യും.
![]()
- നിങ്ങളുടെ ArmControl പ്രോജക്റ്റിലേക്ക് ഒരു സെക്കൻഡ് arm_motor.spin_for()കമാൻഡ് ചേർക്കുക, അതുവഴി കൈ 90 ഡിഗ്രി വരെ ഉയരും, 2 സെക്കൻഡ് കാത്തിരിക്കും, തുടർന്ന് പിന്നിലേക്ക് താഴ്ത്തുക.
- സൂചന:കമാൻഡിനുള്ളിലെ ദിശ നിങ്ങൾ മാറ്റേണ്ടതുണ്ട്.
- waitകമാൻഡ് പ്രവർത്തിക്കുമ്പോൾ ആം അതിന്റെ സ്ഥാനം നിലനിർത്തുന്നത് ശ്രദ്ധിക്കുക. ഗുരുത്വാകർഷണബലത്തിനെതിരെ കൈ ഉയർത്തി നിർത്താൻ മോട്ടോർ ബാറ്ററിയിൽ നിന്ന് വൈദ്യുതി ഉപയോഗിക്കുന്നു. കാരണം മോട്ടോർ സ്റ്റോപ്പ് സ്ഥാപിക്കുന്നതിനുള്ള ഡിഫോൾട്ട് സെറ്റിംഗ്ഹോൾഡ്സെറ്റിംഗ് ആണ്. നിർത്തുന്നതിന് മറ്റ് രണ്ട് ക്രമീകരണങ്ങളുണ്ട് -ബ്രേക്ക്ഉംകോസ്റ്റ്. നിങ്ങൾ അവയെക്കുറിച്ച് മറ്റൊരു ലാബിൽ പഠിക്കും.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
വെല്ലുവിളിക്കുള്ള പരിഹാരം താഴെ കൊടുക്കുന്നു. കൈ താഴ്ത്താൻ, ചേർത്ത arm_motor.spin_for()കമാൻഡിലെ “FORWARD” പാരാമീറ്റർ “REVERSE” ആക്കി മാറ്റേണ്ടതുണ്ട്.
# പ്രോജക്റ്റ് കോഡ് ആരംഭിക്കുക
arm_motor.set_position(0, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
wait(2, SECONDS)
arm_motor.spin_for(REVERSE, 90, DEGREES)ഘട്ടം 5: ഫ്ലൈറ്റ് ട്രാഫിക് കൺട്രോളർ ചലഞ്ച് പൂർത്തിയാക്കുക
![]() ഫ്ലൈറ്റ് ട്രാഫിക് കൺട്രോളർ ചലഞ്ചിൽ, ക്ലോബോട്ട് 90 ഡിഗ്രിക്ക് ഒരു തവണ കൈ മുകളിലേക്കും താഴേക്കും ചലിപ്പിക്കണം, 3 സെക്കൻഡ് കാത്തിരിക്കണം, 45 ഡിഗ്രിക്ക് രണ്ട് തവണ കൈ മുകളിലേക്കും താഴേക്കും ചലിപ്പിക്കണം, 5 സെക്കൻഡ് കാത്തിരിക്കണം, തുടർന്ന് 90 ഡിഗ്രിക്ക് മൂന്ന് തവണ കൈ മുകളിലേക്കും താഴേക്കും ചലിപ്പിക്കണം.
ഫ്ലൈറ്റ് ട്രാഫിക് കൺട്രോളർ ചലഞ്ചിൽ, ക്ലോബോട്ട് 90 ഡിഗ്രിക്ക് ഒരു തവണ കൈ മുകളിലേക്കും താഴേക്കും ചലിപ്പിക്കണം, 3 സെക്കൻഡ് കാത്തിരിക്കണം, 45 ഡിഗ്രിക്ക് രണ്ട് തവണ കൈ മുകളിലേക്കും താഴേക്കും ചലിപ്പിക്കണം, 5 സെക്കൻഡ് കാത്തിരിക്കണം, തുടർന്ന് 90 ഡിഗ്രിക്ക് മൂന്ന് തവണ കൈ മുകളിലേക്കും താഴേക്കും ചലിപ്പിക്കണം.
ക്ലോബോട്ടിന്റെ പെരുമാറ്റരീതികളുടെ ഒരു പട്ടിക ഇതാ:
- കൈ മുകളിലേക്കും പിന്നീട് താഴേക്കും 90 ഡിഗ്രി കോണിൽ ചലിപ്പിക്കുക.
- 3 സെക്കൻഡ് കാത്തിരിക്കൂ.
- കൈ മുകളിലേക്കും പിന്നീട് താഴേക്കും 45 ഡിഗ്രി കോണിൽ ചലിപ്പിക്കുക.
- കൈ മുകളിലേക്കും പിന്നീട് താഴേക്കും 45 ഡിഗ്രി കോണിൽ ചലിപ്പിക്കുക.
- 5 സെക്കൻഡ് കാത്തിരിക്കൂ.
- കൈ മുകളിലേക്കും പിന്നീട് താഴേക്കും 90 ഡിഗ്രി കോണിൽ ചലിപ്പിക്കുക.
- കൈ മുകളിലേക്കും പിന്നീട് താഴേക്കും 90 ഡിഗ്രി കോണിൽ ചലിപ്പിക്കുക.
- കൈ മുകളിലേക്കും പിന്നീട് താഴേക്കും 90 ഡിഗ്രി കോണിൽ ചലിപ്പിക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
ഈ ചലഞ്ചിലെ മിക്ക കമാൻഡുകളും arm_motor.spin_for()ആണ്. കൈ മുകളിലേക്ക് നീക്കാൻ ഒരു കമാൻഡും കൈ താഴേക്ക് നീക്കാൻ ഒരു കമാൻഡും ചേർത്ത ശേഷം, നിങ്ങൾക്ക് രണ്ട് കമാൻഡുകൾ ഹൈലൈറ്റ് ചെയ്യാനും, വലത്-ക്ലിക്കുചെയ്യാനും, തുടർന്ന് ആവശ്യമുള്ളത്ര തവണ പകർത്തി ഒട്ടിക്കാനും തിരഞ്ഞെടുക്കാനും കഴിയും. പിന്നെ വെല്ലുവിളി നേരിടാൻ പാരാമീറ്ററുകൾ മാറ്റാനും waitകമാൻഡുകൾ ഇടയിൽ ചേർക്കാനും കഴിയും.
- ഫ്ലൈറ്റ് ട്രാഫിക് കൺട്രോളർ ചലഞ്ച് പരിഹാരത്തിന്റെ ഒരു ഉദാഹരണം ഇവിടെ അവലോകനം ചെയ്യുക:
# പ്രോജക്റ്റ് കോഡ് ആരംഭിക്കുക
arm_motor.set_position(0, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)
കാത്തിരിക്കുക(3, SECONDS)
arm_motor.spin_for(FORWARD, 45, DEGREES)
arm_motor.spin_for(REVERSE, 45, DEGREES)
arm_motor.spin_for(FORWARD, 45, DEGREES)
arm_motor.spin_for(REVERSE, 45, DEGREES)
കാത്തിരിക്കുക(5, SECONDS)
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)കൂടുതൽ പുരോഗമിച്ച വിദ്യാർത്ഥികൾ പരിഹാരം ലളിതമാക്കാൻ ലൂപ്പുകൾ ഉപയോഗിച്ചേക്കാം.
# പ്രോജക്റ്റ് കോഡ് ആരംഭിക്കുക
arm_motor.set_position(0, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)
wait(3, SECONDS)
repeat_count in range(2):
arm_motor.spin_for(FORWARD, 45, DEGREES)
arm_motor.spin_for(REVERSE, 45, DEGREES)
wait(5, SECONDS)
repeat_count in range(3):
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)- പ്രോഗ്രാമിംഗ് റൂബ്രിക്(ഗൂഗിൾ ഡോക് / .docx / .pdf)