
Programování robotického ramene - Python
![]() Nástin aktivit
učitele
Nástin aktivit
učitele
- Tato ukázka seznámí studenty se základním programováním motoru paže robota V5 Clawbot.
- Naučení se programovat motor paže umožňuje studentům správně ovládat pohyby paží robota V5 Clawbot. Více informací o instrukcích používaných v projektu Python naleznete v k VEXcode V5.
![]() Tipy
učitele
Používání automatického doplňování
Tipy
učitele
Používání automatického doplňování
Automatické doplňování je funkce ve VEXcode V5, která předpovídá zbytek příkazu, který píšete. Během práce s VEXcode V5 je povzbuďte k používání funkce automatického doplňování, která jim pomůže se syntaxí Pythonu. Jakmile začnete psát instrukci, můžete si všimnout funkce automatického dokončování. Pomocí kláves „Nahoru“ a „Dolů“ vyberte požadovaný název a poté stiskněte klávesu „Tab“ nebo (Enter/Return) na klávesnici pro potvrzení výběru. Pro více informací o této funkci si přečtěte článek o Pythonu z 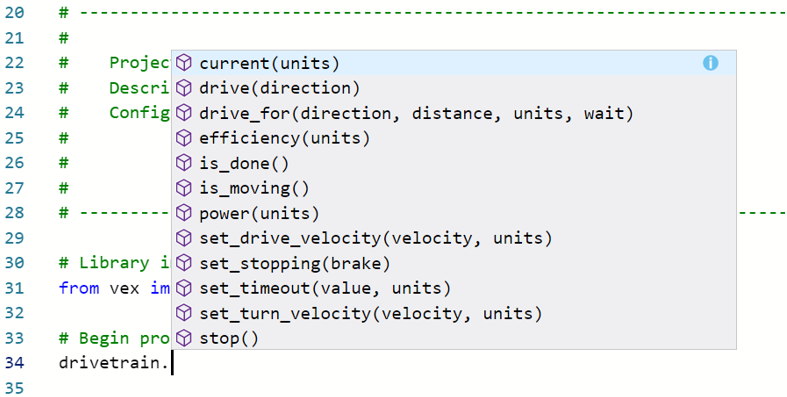
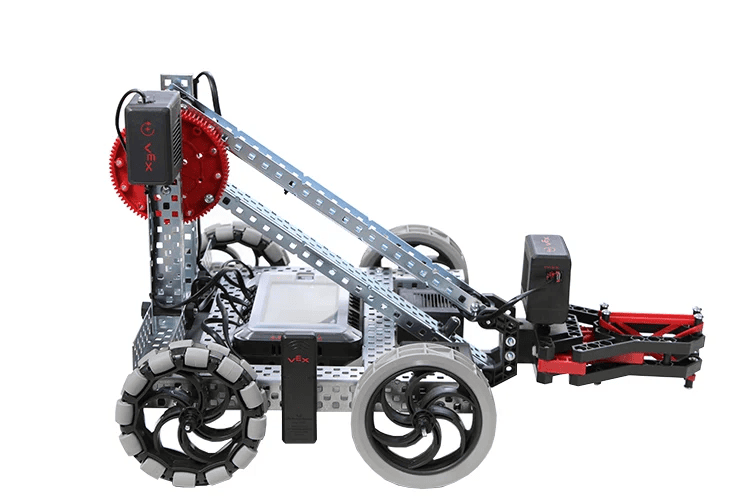
Clawbot V5 je připraven k dosažení!
Tento průzkum vám poskytne nástroje, abyste mohli začít vytvářet skvělé projekty, které využívají paži V5 Clawbota.
- Instrukce VEXcode V5 Python, které budou použity v tomto průzkumu:
- arm_motor.spin_for(VPŘED, 90, STUPNĚ)
- arm_motor.set_position(0, DEGREES)
- čekat (2, SECONDS)
-
Chcete-li zjistit další informace o pokynu, vyberte ikonu otazníku vedle příkazu a zobrazí se další informace.

- Ujistěte se, že máte stažený a připravený potřebný hardware, svůj technický notebook a VEXcode V5.
| Množství | Potřebné materiály |
|---|---|
| 1 |
VEX V5 Classroom Starter Kit (s aktuálním firmwarem) |
| 1 |
VEXkód V5 |
| 1 |
Inženýrský zápisník |
| 1 |
Příklad projektu s Clawbotem a Advanced TrainingBot (pohon 2 motory, bez gyroskopu) |
Krok 1: Příprava na průzkum
Než začnete s aktivitou, máte každou z těchto položek připravenou? Zkontrolujte každou z následujících možností:
-
Jsou motory zapojeny do správných portů?
-
Jsou inteligentní kabelyzcela zasunutydo všech motorů?
![]() Tipy pro učitele
Tipy pro učitele
Předveďte studentům každý krok řešení problémů.
Krok 2: Zahájení nového projektu
Před zahájením projektu vyberte správnou šablonu projektu. Ukázkový projekt Clawbota a Advanced TrainingBot (pohon 2 motory, bez gyroskopu) obsahuje konfiguraci motorů Clawbota. Pokud šablonu nepoužijete, váš robot nespustí projekt správně.

Proveďte následující kroky:
- Otevřete nabídku Soubor.
- VyberteOtevřítPříklady.
- Vyberte a otevřete ukázkový projekt Clawbot a Advanced TrainingBot (pohon se 2 motory, bez gyroskopu).
- Protože budeme programovat pro ovládání ramene, přejmenujte svůj projektArmControl.
- Uložtesvůj projekt.
- Zkontrolujte, zda je název projektu ArmControl nyní v okně uprostřed panelu nástrojů.

![]() Tipy pro učitele
Tipy pro učitele
- Protože se jedná o úvodní aktivitu s programováním, měl by učitel nejprve namodelovat jednotlivé kroky a poté požádat studenty, aby provedli stejné akce. Učitel by pak měl sledovat, zda studenti správně dodržují kroky.
- Ujistěte se, že studenti vybrali v nabídce Soubor možnost Otevřít příklady.
- Ujistěte se, že si studenti vybrali vzorový projekt Clawbot a Advanced TrainingBot (pohon se 2 motory, bez gyroskopu).
Můžete studentům upozornit, že na stránce Příklady je k dispozici několik možností, ze kterých si mohou vybrat. Při stavbě a používání jiných robotů budou mít možnost používat různé šablony.
- Můžete studenty požádat, aby k názvu projektu přidali své iniciály nebo název své skupiny. To pomůže rozlišit projekty, pokud požádáte studenty, aby je odevzdali.
![]() Nástroje pro učitele
projektů
Nástroje pro učitele
projektů
- Zdůrazněte, že když poprvé otevřeli VEXcode V5, okno bylo označeno jako Projekt VEXcode. Projekt VEXcode je výchozí název projektu při prvním otevření VEXcode V5. Jakmile byl projekt přejmenován a uložen, zobrazení se aktualizovalo a zobrazovalo se nový název projektu. Pomocí tohoto okna v panelu nástrojů je snadné zkontrolovat, zda studenti používají správný projekt.
- Řekněte studentům, že jsou nyní připraveni začít se svým prvním projektem. Vysvětlete studentům, že pouhým provedením několika jednoduchých kroků budou schopni vytvořit a spustit projekt, který bude zvedat a spouštět paži Clawbota.
- Připomeňte studentům, aby si své projekty během práce ukládali. Články v sekci Python v knihovně VEX vysvětlují postupy ukládání ve VEXcode V5.
![]() Sada nástrojů pro učitele
Zastavte
a diskutujte
Sada nástrojů pro učitele
Zastavte
a diskutujte
Toto je dobrý bod k zastavení a k tomu, aby si studentské skupiny zopakovaly kroky, které byly právě dokončeny při zahájení nového projektu ve VEXcode V5.
Krok 3: Zvedněte paži
Nyní začneme naprogramováním paže, aby se zvedla!
# Import knihovny
z importu vex *
# Zahájení kódu projektu
arm_motor.set_position(0, DEGREES)- Napište příkaz arm_motor.set_position(), jak je uvedeno výše, do programovací oblasti pro nastavení počáteční polohy ramene.
arm_motor.set_position(0, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)- Přidejte příkaz arm_motor.spin_for()pod příkaz arm_motor.set_position() , jak je znázorněno výše, pro pohyb ramene nahoru.

- Vyberte ikonu Slot. Svůj projekt si můžete stáhnout do jednoho z dostupných slotů v Robot Brain. Vyberte Slot 1.
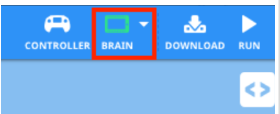
- Připojte robota k počítači nebo tabletu. Ikona mozku v panelu nástrojůse po úspěšném navázání připojení rozsvítí zeleně.

- Klikněte na tlačítkoStáhnoutna panelu nástrojů pro stažení projektu ArmControl do robotického mozku.
![]() Sada nástrojů pro učitele
Sada nástrojů pro učitele
Pokud studenti používají počítač, požádejte je, aby nyní odpojili USB kabel od robotického mozku. Pokud je robot během spouštění projektu připojen k počítači, může to způsobit, že bude tahat za připojovací kabel.

- Zkontrolujte, zda se projekt ArmControl stáhl do mozku ve vámi zvoleném slotu.
![]() Sada nástrojů pro učitele
Model
Sada nástrojů pro učitele
Model
Předveďte spuštění projektu před třídou, než ho všichni studenti zkusí najednou. Shromážděte studenty na jednom místě a nechte dostatek prostoru, aby Clawbot mohl pohybovat svou paží. Ukažte, jak ukončit projekt a vrátit paži Clawbota do klidové polohy.
Řekněte studentům, že nyní je řada na nich, aby vypracovali své projekty. Ujistěte se, že mají dostatek prostoru pro bezpečné zvednutí paže Clawbota.
- Spusťte projekt na Clawbotu tak, že se ujistíte, že je projekt vybrán, a poté stisknete tlačítko Spustit. Gratulujeme k vytvoření vašeho prvního projektu Claw Arm!
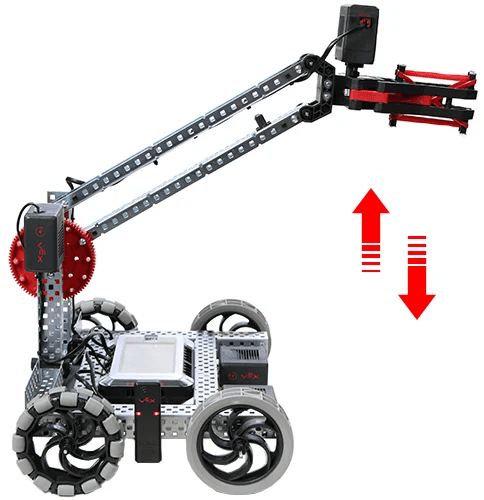
Krok 4: Vyzkoušejte toto: Naprogramujte paži dolů
Nyní, když jste naprogramovali rameno, aby se pohybovalo nahoru, budete nyní naprogramovat rameno pro spouštění nebo pohyb dolů.
![]()
- Přidejte do projektu ArmControl druhý příkaz arm_motor.spin_for(), aby se rameno zvedlo o 90 stupňů, počkalo 2 sekundy a poté se spustilo zpět.
- Nápověda:Budete muset změnit směr v rámci příkazu.
- Všimněte si, že rameno drží svou pozici, zatímco je spuštěn příkazwait. Motor čerpá energii z baterie, aby držel rameno proti gravitační síle. Je to proto, že výchozí nastavení pro zastavení motoru je nastaveníhold. Pro zastavení existují dvě další nastavení -brzdaavolný doběh. O těch se dozvíte v jiné laboratoři.
![]() Řešení
–
pro učitele – sada nástrojů
Řešení
–
pro učitele – sada nástrojů
Řešení problému je uvedeno níže. studenti mohli rameno spustit dolů, museli v příkazu arm_motor.spin_for) změnit parametr „VPŘED“ na „ZADÁNÍ.
# Začátek projektu kód
arm_motor.set_position(0, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
wait(2, SECONDS)
arm_motor.spin_for(REVERSE, 90, DEGREES)Krok 5: Dokončete výzvu řídícího letového provozu
![]() Ve výzvě Flight Traffic Controller Challenge musí Clawbot pohnout paží nahoru a dolů jednou o 90 stupňů, počkat 3 sekundy, pohnout paží dvakrát nahoru a dolů o 45 stupňů, počkat 5 sekund a poté posunout paži nahoru a dolů o tři sekundy. krát pro 90 stupňů.
Ve výzvě Flight Traffic Controller Challenge musí Clawbot pohnout paží nahoru a dolů jednou o 90 stupňů, počkat 3 sekundy, pohnout paží dvakrát nahoru a dolů o 45 stupňů, počkat 5 sekund a poté posunout paži nahoru a dolů o tři sekundy. krát pro 90 stupňů.
Zde je seznam chování Clawbota:
- Pohybujte paží nahoru a poté dolů o 90 stupňů.
- Počkejte 3 sekundy.
- Pohybujte paží nahoru a poté dolů o 45 stupňů.
- Pohybujte paží nahoru a poté dolů o 45 stupňů.
- Počkejte 5 sekund.
- Pohybujte paží nahoru a poté dolů o 90 stupňů.
- Pohybujte paží nahoru a poté dolů o 90 stupňů.
- Pohybujte paží nahoru a poté dolů o 90 stupňů.
![]() Řešení
–
pro učitele – sada nástrojů
Řešení
–
pro učitele – sada nástrojů
Většina příkazů v této výzvě je arm_motor.spin_for(). Po přidání příkazu pro pohyb ramene nahoru a jednoho pro pohyb ramene dolů můžete oba příkazy označit, kliknout pravým tlačítkem myši a poté je zkopírovat a vložit tolikrát, kolikrát je potřeba. Pak lze parametry změnit tak, aby splňovaly daný požadavek, a mezi ně lze přidat příkazy wait.
- Prohlédněte si příklad řešení úkolu pro řídícího letového provozu zde:
# Začátek projektu
arm_motor.set_position(0, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)
wait(3, SECONDS)
arm_motor.spin_for(FORWARD, 45, DEGREES)
arm_motor.spin_for(REVERSE, 45, DEGREES)
arm_motor.spin_for(FORWARD, 45, DEGREES)
arm_motor.spin_for(REVERSE, 45, DEGREES)
wait(5, SECONDS)
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(ZPĚT, 90, STUPŇŮ)
arm_motor.spin_for(VPŘED, 90, STUPŇŮ)
arm_motor.spin_for(ZPĚT, 90, STUPŇŮ)Pokročilejší studenti mohou pro zjednodušení řešení použít smyčky.
# Začátek projektu
arm_motor.set_position(0, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)
wait(3, SECONDS)
for repeat_count in range(2):
arm_motor.spin_for(FORWARD, 45, DEGREES)
arm_motor.spin_for(REVERSE, 45, DEGREES)
wait(5, SECONDS)
for repeat_count in range(3):
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)- Programovací rubrika(Dokumentace Google / .docx / .pdf)