
![]() Lehrer-Toolbox
-
Aktivitätsübersicht
Lehrer-Toolbox
-
Aktivitätsübersicht
- Diese Erkundung führt die Schüler in die grundlegende Programmierung des Armmotors des V5 Clawbot ein.
- Durch das Erlernen der Programmierung des Armmotors können die Schüler die Armbewegungen des V5 Clawbot richtig steuern. Weitere Informationen zu den in einem Python-Projekt verwendeten Anweisungen finden Sie in den Hilfeinformationen für VEXcode V5 Python.
![]() Lehrertipps
-
Autovervollständigung verwenden
Lehrertipps
-
Autovervollständigung verwenden
Die Autovervollständigung ist eine Funktion in VEXcode V5, die den Rest des von Ihnen eingegebenen Befehls vorhersagt. Ermutigen Sie die Schüler, bei ihrer Arbeit mit VEXcode V5 die Autovervollständigungsfunktion zu verwenden, um sich mit der Python-Syntax vertraut zu machen. Möglicherweise bemerken Sie eine Autovervollständigungsfunktion, wenn Sie mit der Eingabe der Anweisung beginnen. Wählen Sie mit den Tasten „Auf“ und „Ab“ den gewünschten Namen aus und drücken Sie dann die Tabulatortaste oder die Eingabetaste (Return) auf Ihrer Tastatur, um die Auswahl zu treffen. Weitere Informationen zu dieser Funktion finden Sie im Python-Artikel. 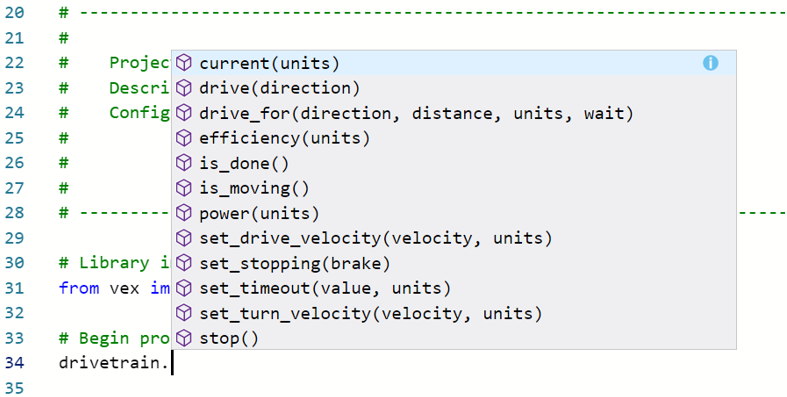
Der V5 Clawbot ist einsatzbereit!
Diese Erkundung gibt Ihnen die Werkzeuge, die Sie zum Erstellen einiger cooler Projekte benötigen, bei denen der Arm des V5 Clawbots zum Einsatz kommt.
- VEXcode V5 Python-Anweisungen, die bei dieser Untersuchung verwendet werden:
- arm_motor.spin_for(VORWÄRTS, 90, GRAD)
- arm_motor.set_position(0, GRAD)
- warte(2, SEKUNDEN)
-
Um weitere Informationen zur Anweisung zu erhalten, wählen Sie das Fragezeichensymbol neben einem Befehl aus, um weitere Informationen anzuzeigen.

- Stellen Sie sicher, dass Sie über die erforderliche Hardware, Ihr technisches Notizbuch und VEXcode V5 verfügen und bereit sind.
| Menge | Benötigte Materialien |
|---|---|
| 1 |
VEX V5 Classroom Starter Kit (mit aktueller Firmware) |
| 1 |
VEXcode V5 |
| 1 |
Technisches Notizbuch |
| 1 |
Clawbot-Vorlage (Antriebsstrang mit 2 Motoren, kein Gyro) Beispielprojekt |
Schritt 1: Vorbereitung der Erkundung
Haben Sie alle diese Gegenstände bereit, bevor Sie mit der Aktivität beginnen? Überprüfen Sie jedes der folgenden Elemente:
-
Sind die Motoren an die richtigen Anschlüsse angeschlossen?
-
Sind die Smart Cables bei allen Motoren vollständig eingesteckt?
-
Ist das Gehirn eingeschaltet?
-
Ist der Akku geladen?
![]() Tipps für Lehrer
Tipps für Lehrer
Machen Sie den Schülern jeden Schritt zur Fehlerbehebung exemplarisch vor.
Schritt 2: Neues Projekt starten
Wählen Sie das richtige Vorlagenprojekt aus, bevor Sie mit Ihrem Projekt beginnen. Das Beispielprojekt „Clawbot-Vorlage (Antriebsstrang mit 2 Motoren, kein Gyro)“ enthält die Motorenkonfiguration des Clawbots. Wenn die Vorlage nicht verwendet wird, führt Ihr Roboter das Projekt nicht korrekt aus.

Führen Sie die folgenden Schritte aus:
- Öffnen Sie das Menü Datei.
- Auswählen Öffnen Beispiele.

- Wählen und öffnen Sie das Beispielprojekt „Clawbot-Vorlage (Antriebsstrang mit 2 Motoren, kein Gyro)“.
- Da wir die Steuerung des Arms programmieren werden, benennen Sie Ihr Projekt ArmControlum.
- Speichern Sie Ihr Projekt.
- Überprüfen Sie, ob der Projektname ArmControl jetzt im Fenster in der Mitte der Symbolleiste angezeigt wird.

![]() Tipps für Lehrer
Tipps für Lehrer
- Da es sich hierbei um eine Aktivität für Anfänger im Programmieren handelt, sollte der Lehrer die Schritte vorführen und die Schüler anschließend bitten, dieselben Aktionen auszuführen. Der Lehrer sollte die Schüler dann überwachen, um sicherzustellen, dass sie die Schritte richtig ausführen.
- Stellen Sie sicher, dass die Studierenden im Menü „Datei“ die Option „Beispiele öffnen“ ausgewählt haben.
- Stellen Sie sicher, dass die Schüler das Beispielprojekt „Clawbot-Vorlage (Antriebsstrang mit 2 Motoren, kein Gyro)“ ausgewählt haben.
Sie können die Schüler darauf hinweisen, dass auf der Seite „ Beispiele mehrere Auswahlmöglichkeiten zur Verfügung stehen. Wenn sie andere Roboter bauen und verwenden, haben sie die Möglichkeit, unterschiedliche Vorlagen zu verwenden.
- Sie können die Studierenden bitten, dem Projektnamen ihre Initialen oder den Namen ihrer Gruppe hinzuzufügen. Dies trägt zur Differenzierung der Projekte bei, wenn Sie die Studierenden auffordern, diese einzureichen.
![]() Lehrer-Toolbox
-
Projekte speichern
Lehrer-Toolbox
-
Projekte speichern
- Weisen Sie darauf hin, dass das Fenster beim ersten Öffnen von VEXcode V5 die Bezeichnung „VEXcode-Projekt“ trug. „VEXcode-Projekt“ ist der Standardprojektname beim ersten Öffnen von VEXcode V5. Nachdem das Projekt umbenannt und gespeichert wurde, wurde die Anzeige aktualisiert und zeigte den neuen Projektnamen. Über dieses Fenster in der Symbolleiste lässt sich leicht überprüfen, ob die Studierenden das richtige Projekt verwenden.
- Sagen Sie den Schülern, dass sie jetzt bereit sind, mit ihrem ersten Projekt zu beginnen. Erklären Sie den Schülern, dass sie mit nur wenigen einfachen Schritten ein Projekt erstellen und ausführen können, mit dem der Arm des Clawbots angehoben und abgesenkt wird.
- Erinnern Sie die Schüler daran, ihre Projekte während der Arbeit zu speichern. Die Artikel im Abschnitt Python der VEX-Bibliothek erläutern Speicherpraktiken in VEXcode V5.
![]() Lehrer-Toolbox
-
Stoppen und diskutieren
Lehrer-Toolbox
-
Stoppen und diskutieren
Dies ist ein guter Punkt, um eine Pause einzulegen und die Studentengruppen die gerade abgeschlossenen Schritte zum Starten eines neuen Projekts in VEXcode V5 noch einmal durchgehen zu lassen.
Schritt 3: Bewegen Sie den Arm nach oben
Wir beginnen jetzt damit, das Heben des Arms zu programmieren!
# Bibliothek importiert
von Vex-Import *
# Projektcode
beginnen arm_motor.set_position(0, GRAD)- Schreiben Sie den Befehl arm_motor.set_position() wie oben gezeigt in den Programmierbereich, um die Startposition für den Arm festzulegen.
arm_motor.set_position(0, GRAD)
arm_motor.spin_for(VORWÄRTS, 90, GRAD)- Fügen Sie den Befehl arm_motor.spin_for() unter dem Befehl arm_motor.set_position() hinzu, wie oben gezeigt, um den Arm nach oben zu bewegen.

- Wählen Sie das Slot-Symbol. Sie können Ihr Projekt in einen der verfügbaren Slots im Robot Brain herunterladen. Wählen Sie Steckplatz 1.
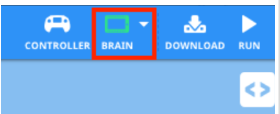
- Verbinden Sie den Roboter mit Ihrem Computer oder Tablet. Das Brain-Symbol in der Symbolleiste wird grün , nachdem eine erfolgreiche Verbindung hergestellt wurde.

- Klicken Sie auf die Schaltfläche Download in der Symbolleiste, um das ArmControl-Projekt auf Robot Brain herunterzuladen.
![]() Lehrer-Toolbox
Lehrer-Toolbox
Wenn die Schüler einen Computer verwenden, bitten Sie sie jetzt, das USB-Kabel vom Robot Brain zu trennen. Wenn der Roboter während der Ausführung eines Projekts an einen Computer angeschlossen ist, kann es passieren, dass er am Verbindungskabel zieht.

- Überprüfen Sie, ob das ArmControl-Projekt im ausgewählten Steckplatz in das Brain heruntergeladen wurde.
![]() Lehrer-Toolbox
-
Modell zuerst
Lehrer-Toolbox
-
Modell zuerst
Führen Sie das Projekt vor der Klasse vor, bevor Sie es alle Schüler gleichzeitig ausprobieren lassen. Versammeln Sie die Schüler an einem Ort und lassen Sie genügend Platz, damit der Clawbot seinen Arm bewegen kann. Demonstrieren Sie, wie das Projekt beendet wird und wie der Arm des Clawbots wieder in seine Ruheposition gesenkt wird.
Sagen Sie den Schülern, dass sie jetzt an der Reihe sind, ihre Projekte durchzuführen. Stellen Sie sicher, dass genügend Platz vorhanden ist, um den Arm des Clawbots sicher anzuheben.
- Führen Sie das Projekt auf dem Clawbot aus, indem Sie sicherstellen, dass das Projekt ausgewählt ist, und drücken Sie dann die Schaltfläche „Ausführen“. Herzlichen Glückwunsch zur Erstellung Ihres ersten Claw-Arm-Projekts!
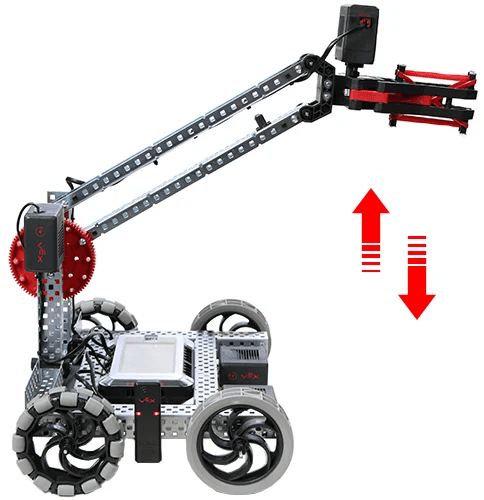
Schritt 4: Versuchen Sie Folgendes: Programmieren Sie den Arm nach unten
Nachdem Sie den Arm so programmiert haben, dass er sich nach oben bewegt, programmieren Sie ihn nun so, dass er sich nach unten senkt.
![]()
- Fügen Sie Ihrem ArmControl-Projekt einen zweiten Befehl arm_motor.spin_for() hinzu, sodass der Arm um 90 Grad angehoben wird, 2 Sekunden wartet und dann wieder gesenkt wird.
- Hinweis: Sie müssen die Richtung innerhalb des Befehls ändern.
- Beachten Sie, dass der Arm seine Position hält, während der Befehl wait ausgeführt wird. Der Motor bezieht Strom aus der Batterie, um den Arm entgegen der Schwerkraft oben zu halten. Das liegt daran, dass die Standardeinstellung für den Motorstopp die Einstellung Hold ist. Es gibt zwei weitere Einstellungen zum Anhalten – Bremsen und Ausrollen. Mehr dazu erfahren Sie in einem anderen Labor.
![]() Lehrer-Toolbox
-
Lösung
Lehrer-Toolbox
-
Lösung
Die Lösung der Herausforderung finden Sie weiter unten. Um den Arm zu senken, mussten die Schüler den Parameter „FORWARD“ im hinzugefügten Befehl arm_motor.spin_for() in „REVERSE“ ändern.
# Projektcode beginnen
arm_motor.set_position(0, GRAD)
arm_motor.spin_for(VORWÄRTS, 90, GRAD)
warten(2, SEKUNDEN)
arm_motor.spin_for(RÜCKWÄRTS, 90, GRAD)Schritt 5: Schließe die Fluglotsen-Herausforderung ab
![]() Bei der Fluglotsen-Herausforderung muss der Clawbot seinen Arm einmal um 90 Grad auf und ab bewegen, 3 Sekunden warten, den Arm zweimal um 45 Grad auf und ab bewegen, 5 Sekunden warten und den Arm dann dreimal um 90 Grad auf und ab bewegen.
Bei der Fluglotsen-Herausforderung muss der Clawbot seinen Arm einmal um 90 Grad auf und ab bewegen, 3 Sekunden warten, den Arm zweimal um 45 Grad auf und ab bewegen, 5 Sekunden warten und den Arm dann dreimal um 90 Grad auf und ab bewegen.
Hier ist eine Liste der Verhaltensweisen des Clawbots:
- Bewegen Sie den Arm um 90 Grad nach oben und dann nach unten.
- Warten Sie 3 Sekunden.
- Bewegen Sie den Arm 45 Grad nach oben und dann nach unten.
- Bewegen Sie den Arm 45 Grad nach oben und dann nach unten.
- Warten Sie 5 Sekunden.
- Bewegen Sie den Arm um 90 Grad nach oben und dann nach unten.
- Bewegen Sie den Arm um 90 Grad nach oben und dann nach unten.
- Bewegen Sie den Arm um 90 Grad nach oben und dann nach unten.
![]() Lehrer-Toolbox
-
Lösung
Lehrer-Toolbox
-
Lösung
Die meisten Befehle in dieser Herausforderung sind arm_motor.spin_for(). Nachdem Sie einen Befehl zum Bewegen des Arms nach oben und einen zum Bewegen des Arms nach unten hinzugefügt haben, können Sie die beiden Befehle markieren, mit der rechten Maustaste klicken und sie dann beliebig oft kopieren und einfügen. Anschließend können die Parameter entsprechend der Herausforderung geändert und dazwischen die Befehle warten eingefügt werden.
- Sehen Sie sich hier eine Beispiellösung für die Flight Traffic Controller Challenge an:
# Projektcode beginnen
arm_motor.set_position(0, GRAD)
arm_motor.spin_for(VORWÄRTS, 90, GRAD)
arm_motor.spin_for(RÜCKWÄRTS, 90, GRAD)
warten(3, SEKUNDEN)
arm_motor.spin_for(VORWÄRTS, 45, GRAD)
arm_motor.spin_for(RÜCKWÄRTS, 45, GRAD)
arm_motor.spin_for(VORWÄRTS, 45, GRAD)
arm_motor.spin_for(RÜCKWÄRTS, 45, GRAD)
warten(5, SEKUNDEN)
arm_motor.spin_for(VORWÄRTS, 90, GRAD)
arm_motor.spin_for(RÜCKWÄRTS, 90, GRAD)
arm_motor.spin_for(VORWÄRTS, 90, GRAD)
arm_motor.spin_for(RÜCKWÄRTS, 90, GRAD)
arm_motor.spin_for(VORWÄRTS, 90, GRAD)
arm_motor.spin_for(RÜCKWÄRTS, 90, GRAD)Fortgeschrittenere Schüler verwenden möglicherweise Schleifen, um die Lösung zu vereinfachen.
# Projektcode beginnen
arm_motor.set_position(0, GRAD)
arm_motor.spin_for(VORWÄRTS, 90, GRAD)
arm_motor.spin_for(RÜCKWÄRTS, 90, GRAD)
warten(3, SEKUNDEN)
auf repeat_count im Bereich(2):
arm_motor.spin_for(VORWÄRTS, 45, GRAD)
arm_motor.spin_for(RÜCKWÄRTS, 45, GRAD)
warten(5, SEKUNDEN)
auf repeat_count im Bereich(3):
arm_motor.spin_for(VORWÄRTS, 90, GRAD)
arm_motor.spin_for(RÜCKWÄRTS, 90, GRAD)- Programmier-Rubriken (Google Doc / .docx / .pdf)