
Bersaing
Sekarang setelah Anda membangun dan menguji proyek untuk mendeteksi dan mendorong Buckyball keluar Lapangan, Anda siap untuk Tantangan Sense and Sweep.
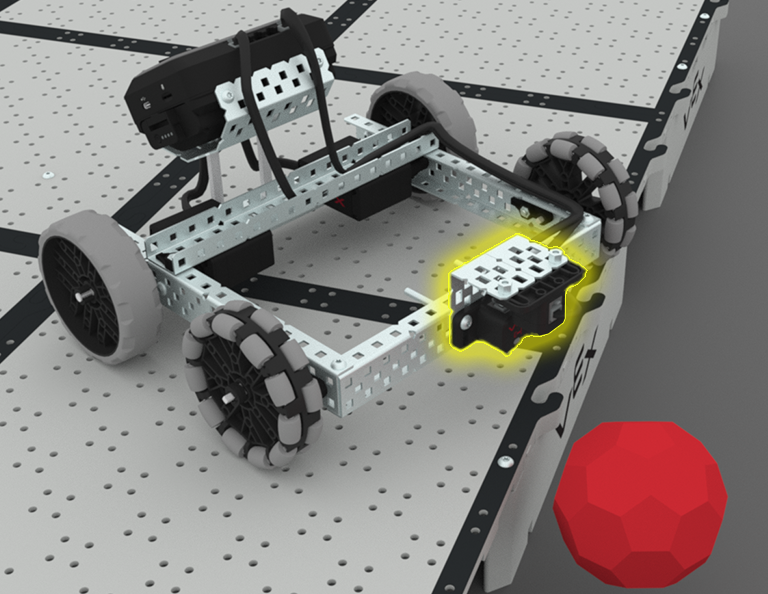
Tujuan tantangan ini adalah mendorong keempat Buckyball keluar Lapangan dalam waktu tercepat. Animasi di bawah menunjukkan contoh cara menyiapkan Lapangan dan memulai kompetisi. Anda akan melihat robot mendeteksi dan mendorong Buckyball pertama, lalu bergerak untuk mendeteksi Buckyball berikutnya. Animasi kemudian akan menunjukkan akhir dari uji waktu saat Buckyball keempat didorong keluar Lapangan! Ikuti langkah-langkah dalam dokumen ini untuk menyelesaikan Tantangan Sense and Sweep.
Setelah Anda menyelesaikan Tantangan Rasakan dan Sapu, hubungi guru Anda. Pastikan Anda telah mendokumentasikan hasil tantangan tersebut di buku catatan teknik Anda.
Refleksi Penutup
Sekarang setelah Anda membuat strategi dan berkompetisi dalam Sense and Sweep Challenge, saatnya untuk merenungkan apa yang telah Anda pelajari dan lakukan dalam Pelajaran ini. Mulailah halaman baru di buku catatan teknik Anda untuk memulai refleksi Anda.
Nilai diri Anda sebagai pemula, magang, atau ahli pada masing-masing konsep berikut di buku catatan teknik Anda. Berikan penjelasan singkat mengapa Anda memberi peringkat tersebut pada diri Anda sendiri untuk setiap konsep:
- Menambahkan Sensor Jarak ke BaseBot Anda dan menggunakannya dalam proyek VEXcode EXP untuk mendeteksi Buckyball
- Membangun dan mengulangi proyek untuk membuat robot Anda mendeteksi dan memindahkan Buckyballs dari Lapangan
- Berkolaborasi dengan anggota tim saya untuk membangun proyek VEXcode EXP yang mendukung strategi permainan kami
Gunakan tabel ini untuk membantu Anda menentukan kategori mana Anda termasuk.
| Pakar | Saya merasa saya sepenuhnya memahami konsepnya dan dapat mengajarkannya kepada orang lain. |
| Anak magang | Saya merasa saya cukup memahami konsepnya untuk berkompetisi dalam tantangan tersebut. |
| Pemula | Saya merasa tidak memahami konsepnya dan tidak tahu cara menyelesaikan tantangan tersebut. |
Apa berikutnya?
Dalam Pelajaran ini, Anda mempelajari tentang Sensor Jarak dan bagaimana sensor tersebut dapat digunakan pada robot untuk mendeteksi objek. Anda juga mempelajari cara menggunakan blok [Tunggu hingga] dalam proyek dengan umpan balik sensor. Anda membangun dan mengulangi proyek VEXcode EXP Anda untuk mendeteksi dan memindahkan Buckyball keluar dari Lapangan, dan berkompetisi dalam tantangan Sense and Sweep.
Pada Pelajaran berikutnya, Anda akan:
- Pelajari tentang Sensor Optik dan bagaimana penggunaannya dalam sebuah proyek
- Pelajari tentang apa itu algoritma dan bagaimana cara penggunaannya
- Bersaing dalam Tantangan Sapu Lapangan
Pilih< Kembali ke Pelajaranuntuk kembali ke Ikhtisar Pelajaran.
PilihPelajaran Berikutnya >untuk melanjutkan ke Pelajaran 4 dan mempelajari tentang Sensor Optik dan algoritma.