
Připravte se na výzvu Vision Data
![]() Sada nástrojů pro učitele
-
Účel této aktivity
Sada nástrojů pro učitele
-
Účel této aktivity
Vision Sensor poskytuje různé údaje, které pak mohou být použity v projektech. Bloky snímání umožňují uživateli pořídit snímky projektu, rozhodnout, zda objekt existuje, rozhodnout, kolik jich existuje, určit souřadnice X a Y středu objektu v rámci snímku snímače Vision Sensor a určit šířku a výšku objektu v pixelech v rámci snímku. Tato aktivita představí všechny související bloky nezbytné pro shromažďování těchto informací v rámci přípravy na výzvu Vision Data Challenge.
Níže je uveden přehled výzvy Vision Data Challenge společnosti Rethink:
-
Zkontrolujte kompletní datovou sadu informací shromážděných z bloků snímání Vision Sensor.
-
Vyplňte částečnou datovou sadu informací shromážděných z Vision Sensor o jiném snímku.
-
Vytvořte datovou sadu na základě snímku a snímacích bloků Vision Sensor.
Snímací bloky kamerového senzoru
VEXcode IQ má snímací bloky pro Vision Sensor. První dva jste již použili v sekci Play k pořízení snímku a ke kontrole, zda objekt existuje.
Na obrázku níže vidíte, že blok (Snapshot) zachytil snímek GREENBOX. Objekt, GREENBOX, byl identifikován na snímku, a tak je odpověď na to, zda existuje, PRAVDIVÁ.
Podívejme se na tyto další snímací bloky a na to, co nám jejich hodnoty říkají.
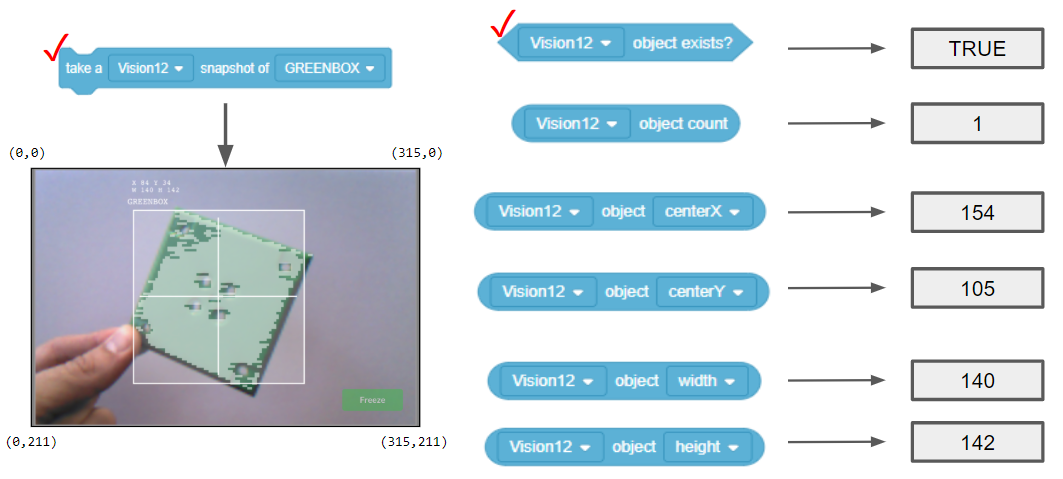
- Blok (Object count) nám říká, kolik objektů GREENBOX je ve snímku. Zde je detekován pouze 1.
- Hodnota X uprostřed nám říká, zda je objekt GREENBOX vlevo nebo vpravo od středového bodu robota. Nezapomeňte, že kamerový senzor je namontován uprostřed přední části robota, takže pohled snímku je pohledem robota.
- Pokud je střed X větší než 157,5, objekt je napravo od středového bodu robota.
- Pokud je střed X menší než 157,5, objekt je nalevo od středového bodu robota.
- Hodnota středu Y nám říká, zda je GREENBOX vyšší nebo nižší než středový bod robota.
- Pokud je střed Y větší než 105,5, je předmět nižší než středový bod robota.
- Pokud je střed Y menší než 105,5, je objekt vyšší než středový bod robota.
- Hodnoty šířky a výšky nám říkají, jak blízko je GREENBOX k robotu.
- Stejný objekt bude mít větší šířku a výšku, jakmile se přiblíží k robotu.
![]() Sada nástrojů pro učitele
-
Proč toto čtení?
Sada nástrojů pro učitele
-
Proč toto čtení?
Informace o nápovědě v rámci VEXcode IQ také poskytují informace o blocích, ale zde jsou shromážděná data kontextualizována podle toho, co konkrétně říkají uživateli o objektu ve snímku.
Poznámky:
-
Hodnoty centerX a centerY celého snímku se používají k určení, zda je objekt vlevo/vpravo nebo nad/pod středovým bodem robota. Vypočítají se vydělením celkového počtu pixelů na této ose dvěma (např. centerX snímku = 315 / 2 = 157,5).
Můžeme předpokládat, že středový bod robota je stejný jako středový bod snímku kamerového senzoru, protože kamerový senzor by měl být namontován ve středu přední strany robota a směřovat dopředu. Při posuzování polohy objektu vzhledem ke středovému bodu robota (nebo snímače vidění) je třeba vzít v úvahu polohu kamerového senzoru na konstrukci robota a míru, do jaké může být kamerový senzor nakloněn směrem dolů.
-
Hodnoty Y se v rámci snímku zvyšují směrem dolů. Než přejdete na další část, ujistěte se, že si to studenti uvědomují.
Jak se vypočítávají hodnoty středu X a středu Y?
Hodnoty jsou vypočteny na základě souřadnic v rámci snímku. Šířka a výška objektu jsou již vypočteny.
Kamerový senzor sleduje hodnoty X a Y v levém horním rohu objektu. Níže jsou tyto souřadnice (84, 34).

Hodnoty středu X a středu Y lze vypočítat na základě souřadnic levého horního rohu (84, 34) a poskytnutých hodnot šířky (W 140) a výšky (H 142).

- centerX = 140/2 + 84 = 154
- centerX = polovina šířky objektu přidaného k jeho souřadnici X zcela vlevo
- centerY = 142/2 + 34 = 105
- centerY = polovina výšky objektu přidaná k jeho nejvyšší souřadnici Y
![]() Sada nástrojů pro učitele
-
Uzavření této stránky
Sada nástrojů pro učitele
-
Uzavření této stránky
Ujistěte se, že studenti rozumí matematice, která se podílí na nalezení středových hodnot X a Y. Budou ho potřebovat pro aktivitu na další stránce.
Zeptejte se, jak se hodnoty (84, 34) a (W 140, H 142) vztahují k souřadnicím uvedeným v rozích snímku. Studenti by si měli uvědomit, že celý snímek je mapován na souřadnicovou rovinu na základě počtu pixelů. Hodnoty X se pohybují od 0 do 315 (šířka 316 pixelů) a hodnoty Y se pohybují od 0 do 211 (výška 212 pixelů). Souřadnice a velikost objektu jsou založeny na tom, kolik pixelů objekt zabírá podél těchto os.